5. Использование систем технического зрения и видеопаспортизации
Системы "технического зрения" с обработкой видеоизображения вагона методами нейрокомпьютерных технологий, обеспечивают автоматическое (без участия человека) распознавание номера вагона при изменении контрастности (загрязненности) от 4 до 80 %. В совокупности с данными ТГНЛ на проходящий поезд суммарная вероятность ошибки в номере вагона может быть обеспечена 10-5 - 10-6 на номер.
Программное обеспечение и структура построения автоматической системы контроля и анализа видео ввода зависит от конкретной технической операции и поставленной задачи при ее выполнении.
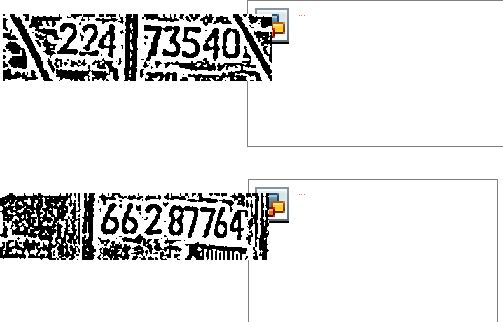
Программное обеспечение номерного автоматического учета базируется на распознавании цифровой информации, выполненной на основе нейро подобных алгоритмов (см. рисунок бинарного представления распознанного номера).
Программное обеспечение автоматического распознавания зоны пломбы номера для коммерческого осмотра содержит анализ сцен, построение контуров, выработку решающего правила на основе полученного контура объекта распознавания
Программное обеспечение для технического осмотра включает в себя номерной учет и позволяет вести развитие базы данных всех диагностических признаков, полученных на различных средствах диагностики с соответствующим порядковым и учетным номерами вагонов.
Геометрическое моделирование объектов распознавания лежит в основе программного обеспечения анализа расположения контейнеров на платформе, процесса накопления на позиции, оптимизации процесса расформирования составов и анализа их состояния после операции роспуска на сортировочной горке.
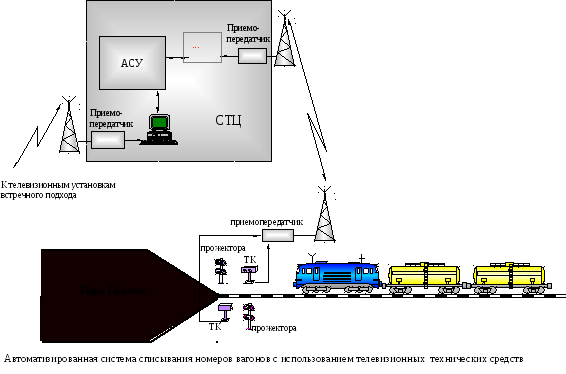
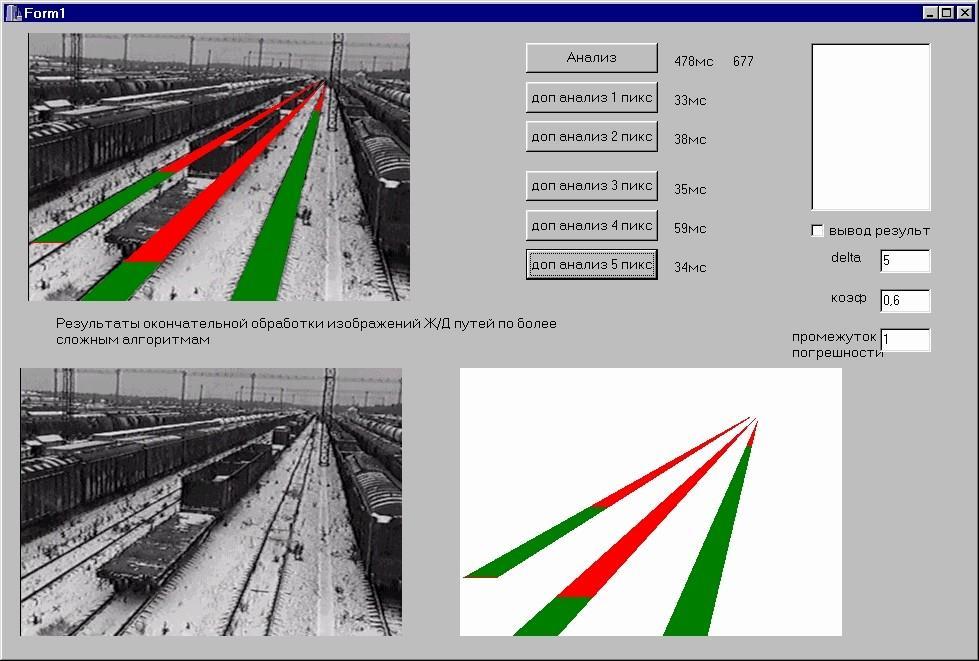
Системы «технического зрения» могут быть использованы для оперативного телевизионного и компьютерного контроля размещения вагонного состава на горке, тормозных позициях и парковой зоне сортировочной станции.
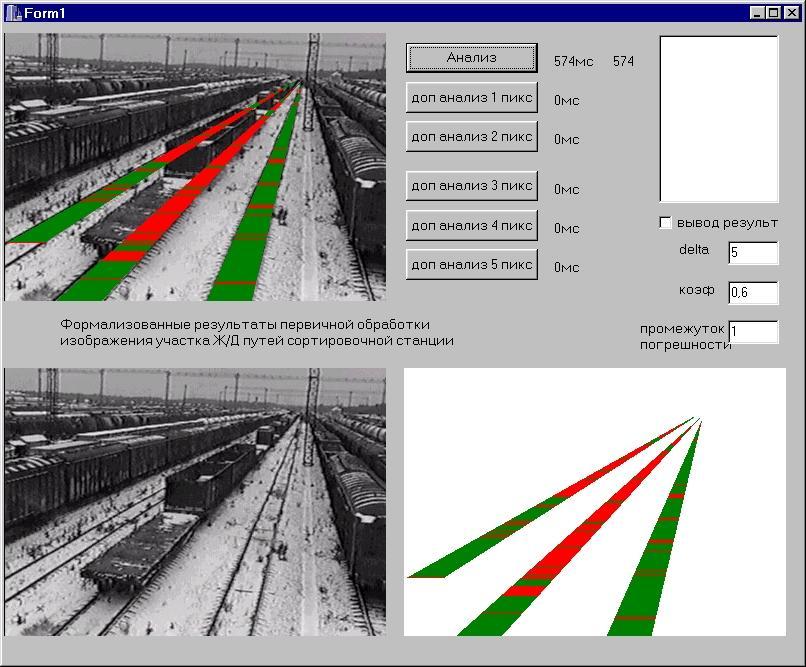
Принцип действия системы заключается в обеспечении видеоконтроля размещения подвижных составов на путях железнодорожных сортировочных станций в оптимальном, для каждого типа световых и погодных условий, спектральном и амплитудном диапазонах оптического излучения и в применении алгоритмов и программ компьютерной обработки телевизионных изображений размещения подвижных составов на железнодорожных путях станций и формализованного представления результатов обработки.
Телевизионные камеры размещаются на монтажных фермах (мачтах), имеющих достаточную высоту для обеспечения видеонаблюдения вагонного парка на станции.
Точность определения местонахождения объектов на местности с помощью телевизионной системы составляет 0,10,3 (м). Однако в силу наличия за высокими вагонами зоны оптической тени, в которой не видны более низкие вагоны и платформы, фактическое значение точности определения положения вагонного состава в парковой зоне будет ниже. С учетом этого, оценку точности определения местонахождения вагонов и платформ в парковой зоне сортировочной станции можно провести исходя из двух отправных условий.
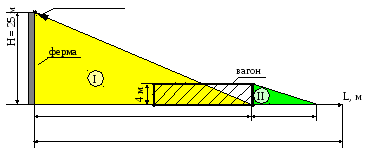
а) Расчета размеров зоны геометрической (оптической) тени высоких вагонов (Н4 м), расположенных на различном удалении от телевизионных камер, установленных в парковой зоне на монтажных фермах высотой 25 м.
б) Оценки возможности определения местоположения вагонов в дальней зоне пространственных участков, заданных телевизионным камерам, при совместной компьютерной обработке телевизионных изображений по двум смежным, граничащим друг с другом участкам.
Размер оптической тени вагонов в продольном, относительно железнодорожных путей направлении, при различном удалении вагонов от телевизионной камеры, можно определить исходя из подобия треугольников I и II, показанных на рис.
телевизионная
 камера
камера
50 м 8 м
65 м
рис.
Из подобия данных треугольников следует, что зона оптической (геометрической) тени от вагона высотой 4 м будет равна:
на расстоянии 5 м от телекамеры, установленной на ферме – 0,8 м;
на расстоянии 10 м от телекамеры, установленной на ферме – 1,6 м;
на расстоянии 25 м от телекамеры, установленной на ферме – 4 м;
на расстоянии 50 м от телекамеры, установленной на ферме – 8 м;
на расстоянии 56 м от телекамеры, установленной на ферме – 8,96 м;
Последние значение геометрической тени совместно с размером расстояния (56 м) дает предельное удаление вагонов в контролируемом участке (65 м).
Таким образом, размер геометрической тени не превышает 9 м. Если же за вагоном стоит платформа высотой 1 м, то размер геометрической тени, при максимальном удалении, уменьшается до 6,72 м.
Вместе с тем следует отметить, что минимальная длина платформы и, тем более вагона, превышает величину 7м или 9м. Поэтому, если телевизионная система не зафиксирует свободный железнодорожный путь на удалении > 65 м (66, 67 и более метров), то это означает, что в зоне геометрической тени расположен вагон или платформа.
Повышение точности определения положения вагона или платформы в дальней зоне позволяет обеспечить совместная обработка видеоинформации по двум смежным граничащим друг с другом участкам. В этом случае за счет уточнения данных по наличию свободного пути или его занятости за пределами зоны геометрической тени по двум участкам можно сделать логическое и числовое заключение о занятости пути в зоны геометрической тени.
Кроме определения точности положения вагонов в продольном направлении необходимо также определить величины геометрических теней при наблюдении вагонов в поперечном, относительно железнодорожных путей, направлении. В этом случае также имеет место маскирование низких железнодорожных платформ вагонами, стоящими на более близком к телевизионной камере пути.
При расстоянии между рельсами 1,5 м и расстоянии между двумя железнодорожными путями 4 м, удаление от телевизионной камеры вагона на предпоследнем 7-ом пути контролируемого каждой телевизионной камерой пучка парковой зоны составит (1,5+4)6+1,5+0,7533+2,2535,5 (м). На этом расстоянии затененная зона от вагона высотой 4 м, стоящего на 7-ом пути (при высоте расположения телекамеры – 25 м), составит 5,64 м. Если за этим вагоном будет стоять платформа высотой 1 м, то зона тени уменьшится до 4,23 м. Дальний борт платформы (на 8-ом пути) будет расположен от края высокого вагона на 7-ом пути на расстоянии 3,25+1,5+0,75=5,5 (м). Таким образом телекамера будет видеть на последнем 8-ом пути 1,3 м ширины низкой платформы. С учетом точности телевизионной камеры (0,1-0,3 м) этого размера достаточно для распознания наличия платформы.
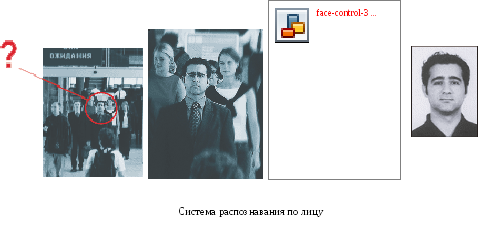
Данные системы могут нести дополнительную нагрузку, обеспечивая задачи технического противодействия террористическим угрозам. При этом могут использоваться и специализированные системы. Система распознавания по лицу основана на распознавании уникальных черт человеческого лица. Используя телекамеру, она сканирует лицо и сверяет его с базой данных. Система позволяет непрерывно контролировать поток людей, отмечая появление определенных посетителей, сообщая о них службе безопасности и занося фотографию в базу данных. Пример распознавания приведен на рисунке.
В настоящее время готовые, проработанные решения существуют на базе оборудования ZN Vision Technologies AG (Германия).
Работа системы строится на разделении человеческого лица на большое количество "базовых точек", в число которых входят скулы, цвет и форма глаз, ширина переносицы и губ. Как показывает практика, для достоверного определения личности достаточно 15-20 таких точек. Фотография и цифровое описание лица заносятся в банк данных, с которым впоследствии сравнивается распознаваемое лицо. Применение такой системы безопасности удобно из-за ее надежности, быстроты, дистанционности и скрытности.
Система обеспечивает эффективное и надежное наблюдение за доступом в контролируемые зоны, предупреждает о появлении разыскиваемых или нежелательных персон, может использоваться службами, занимающимися опознанием личности. Лица, появившиеся в кадре, сравниваются с изображениями людей из существующей базы данных. На контрольный монитор выводятся изображения из базы наиболее похожие на человека в кадре. Это позволяет идентифицировать человека, а так же предупредить об опасности и заблаговременно подготовиться к встрече нежелательных персон.
Система является дополнительным рубежом защиты в системе безопасности. Она "знает" в лицо владельцев всех карт доступа и прежде чем открыть дверь, установит права карты на доступ. Одновременно система сравнивает изображение, переданное телекамерой, с фотографией из базы данных и удостоверяется, что карту предъявил именно владелец. Для чужих дверь останется закрытой, а все попытки обмануть систему даже при поднесении фотографии реального владельца, останутся безуспешными. Высокую надежность обеспечивает функция распознавания "живого лица", имеющаяся в системе.
Данная система служит для опознания человека по его фотографии, видео кадру или фотороботу. Основой является программа распознавания лица и банк данных фотографий. Программа автоматически сравнивает цифровые фотографии из банка данных с распознаваемым лицом и предлагает варианты похожих изображений.
Система используется операторами службы наблюдения для идентификации мошенников, а также особо важных персон среди посетителей казино. С помощью такой системы казино могут создать свои собственные базы данных с цифровыми фотографиями и другими сведениями о посетителях. Цифровые фотографии, полученные с камер наблюдения, обрабатываются специальной программой распознавания лиц. Клиент, пришедший в казино второй раз, будет идентифицирован в течение нескольких секунд. (InfoArt News Agency)