

2. Слідкуючі гідравлічні системи
В рассмотренных выше схемах исполнительный механизм не воспроизводил закона движения управляющего органа: поступательное движение штока гидроцилиндра (или вращение вала гидромотора) не передавалось на управляющий потоком жидкости распределитель, и, таким образом, его открытие было независимым от перемещения штока.
Ниже рассмотрены системы, в которых перемещение исполнительного механизма (так называемый выходной сигнал) автоматически устраняет заданное (командное) перемещение управляющего органа (так называемый входной сигнал), благодаря чему исполнительный механизм воспроизводит, отслеживает, закон движения управляющего органа.
Такие гидравлические системы называются следящими системами или сервосистемами (или сервомеханизмами, если входной и выходной сигналы представляют собой перемещение или угол поворота).
Следовательно, в следящей системе должна иметь место непрерывная связь между выходным и входным элементами. Эта связь называется обратной, и следящие гидравлические системы — это системы с обратной связью.
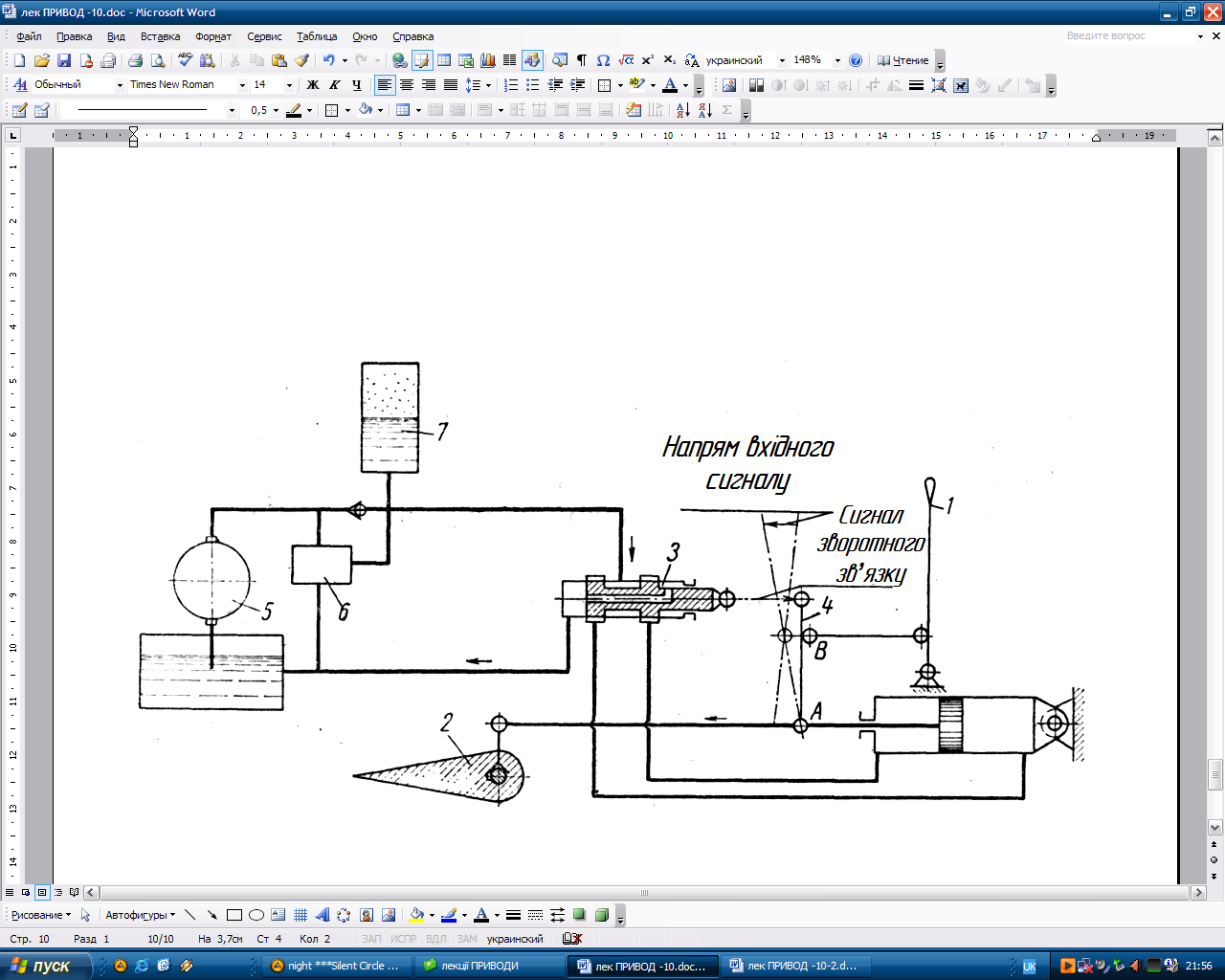
Рис. 151. Слідкуюча система:
1 – ручка керування; 2 – кермо; 3 – розподільник; 4 – важіль зворотного зв’язку; 5 – насос; 6 – автомат розвантаження; 7 – акумулятор
Пример следящей системы показан на рис. 15, где входным элементом служит ручка 1 управления оператора, а выходным – кермо 2 виконавчим механізмом. Рычаг 4, связывающий перемещение штока силового гидроцилиндра с ручкой управления, есть обратная связь.
При некотором, например влево, перемещении ручки 1 этот рычаг поворачивается вокруг точки А и перемещает золотник распределителя 3 тоже влево, благодаря чему жидкость направляется в гидроцилиндр, перемещая его поршень влево и, следовательно, поворачивая руль 2.
Одновременно, автоматически при помощи рычага 4, поворачивающегося уже вокруг точки В, заданное открытие распределителя 3 уменьшается, т. е. снимается входной сигнал и скорость поршня (пропорциональная перемещению) соответственно уменьшается.
Таким образом, элементы, составляющие следящую систему, функционально образуют по крайней мере одну замкнутую цепь, которую можно изобразить в виде структурной схемы, показанной на рис. 16. Величина входного перемещения х сравнивается устройством обратной связи с выходным перемещением у, и по выработанному таким образом рассогласованию е между сигналами определяется скорость движения выходного элемента:
е = х – ку,
где к – передаточное число обратной связи.

Рис. 16. Структурна схема слідкуючої системи:
1 – пристрій що виявляє неузгодження; 2 – виконавчий механізм;
3 –зворотний зв'язок
Рассмотрим несколько конструктивных схем следящих систем.
На рис. 17 показан сервомеханизм, в котором золотник и цилиндр конструктивно объединены в одном блоке.
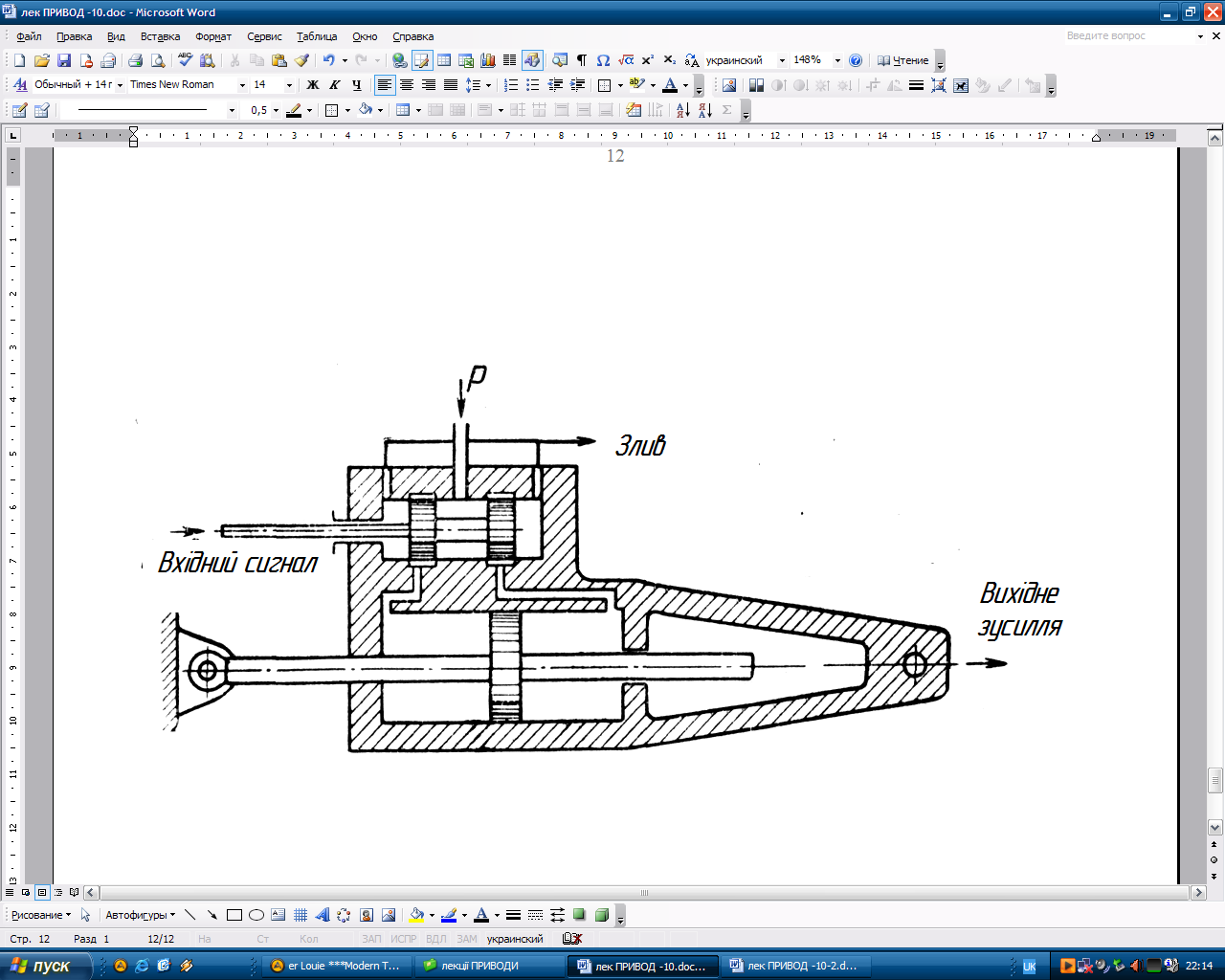
Рис. 17. Схема сервомеханізму з рухомим циліндром
Движущимся элементом в конструкции является цилиндр, что требует применения гибких трубопроводов.
Более компактная конструкция гидравлического сервомеханизма с дифференциальным гидроцилиндром показана на рис. 18, где золотник размещен непосредственно в штоке гидроцилиндра. Давление постоянно подводится к штоковой полости.
При перемещении ручки управления (а следовательно, и золотника) вправо жидкость под давлением поступает по каналам 1 и 2 в полость 3 гидроцилиндра, перемещая поршень вправо. Этим же перемещением осуществляется и обратная связь (закрытие канала золотника).
При перемещении золотника влево полость 3 сообщается каналами 2, 4 и 5 со сливом, благодаря чему силой давления на поршень в штоковой полости. Он перемещается также влево. В этом случае передаточное число (коэффициент) обратной связи к = 1.
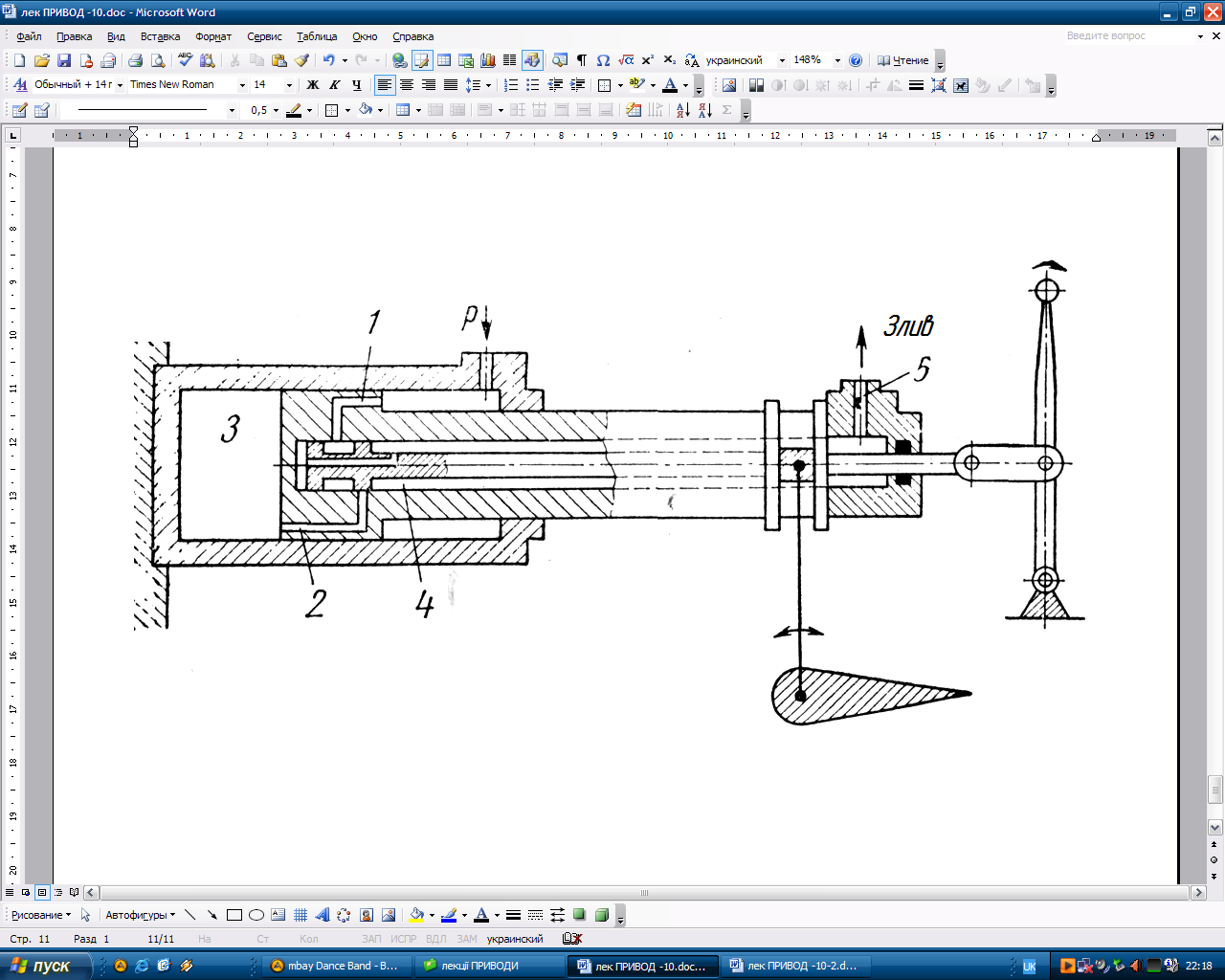
Рис. 18. Схема сервомеханізму з диференціальним поршнем:
1, 2 – внутрішні канали; 3 – порожнина циліндра; 4, 5 – злив
На рис. 19 показана конструкция сервомеханизма с дифференциальным поршнем, отличающаяся клапанным распределением.
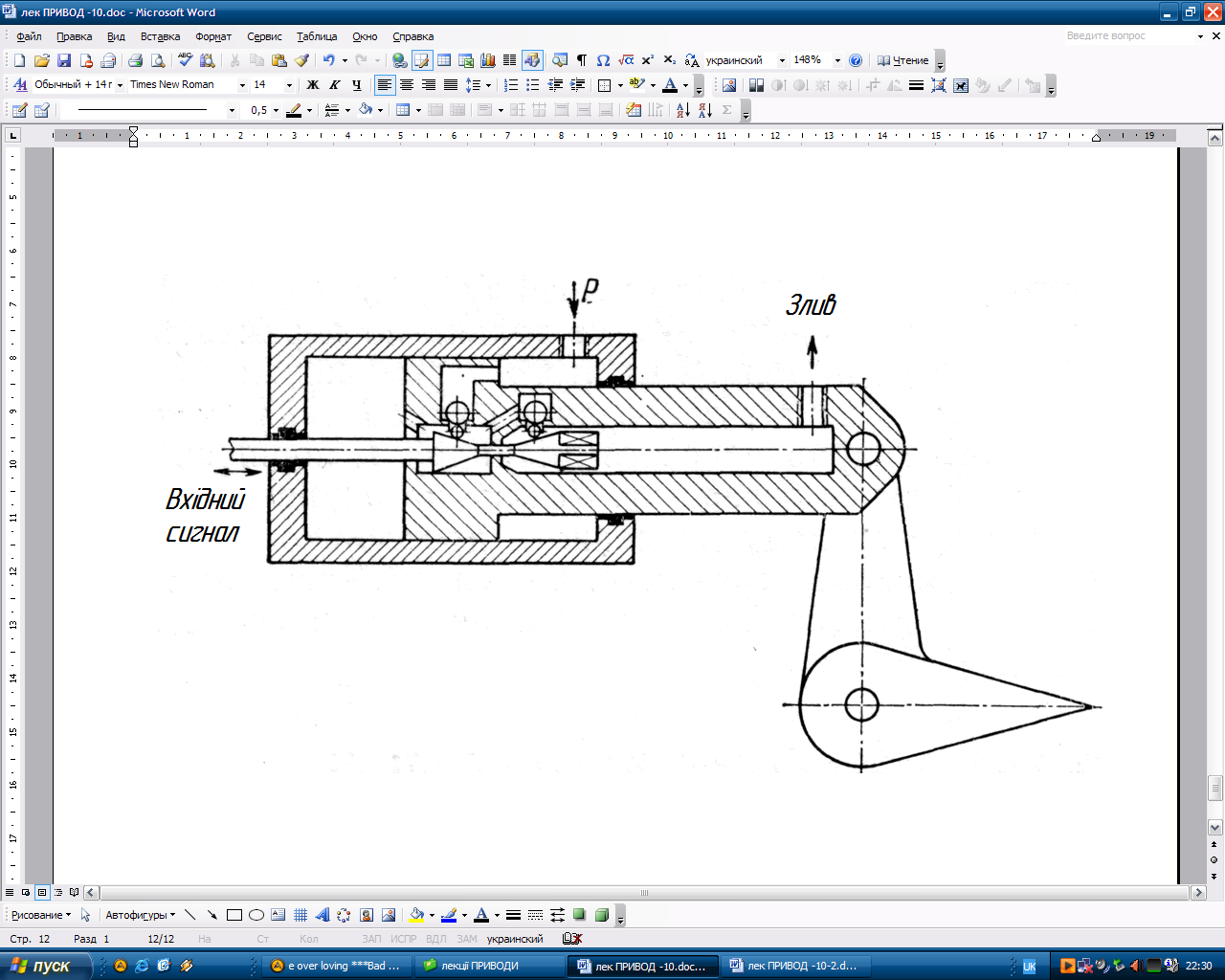
Рис. 19. Сервомеханізм з клапанним розподільником
В рассмотренных выше схемах было осуществлено слежение по перемещению, т. е. такое слежение, при котором шток гидроцилиндра воспроизводит закон входного сигнала в зависимости от величины (перемещения управляющего органа.
Однако нередко по условиям динамической устойчивости (т. е. по колебательным свойствам системы) требуется делать систему более чувствительной к входному сигналу. Для этого применяют следящую систему со слежением не только по перемещению золотника, но и по производной от этого перемещения, что достигается введением в конструкцию линии управления катаракта, т. е. добавочного гидравлического цилиндра 1, поршень которого 2 имеет дроссельное отверстие. Усилие на поршне катаракта пропорционально перепаду давления в дроссельном отверстии, т. е. зависит от расхода через него, а следовательно, от скорости подачи входного сигнала. Такая следящая система показана на рис. 20.
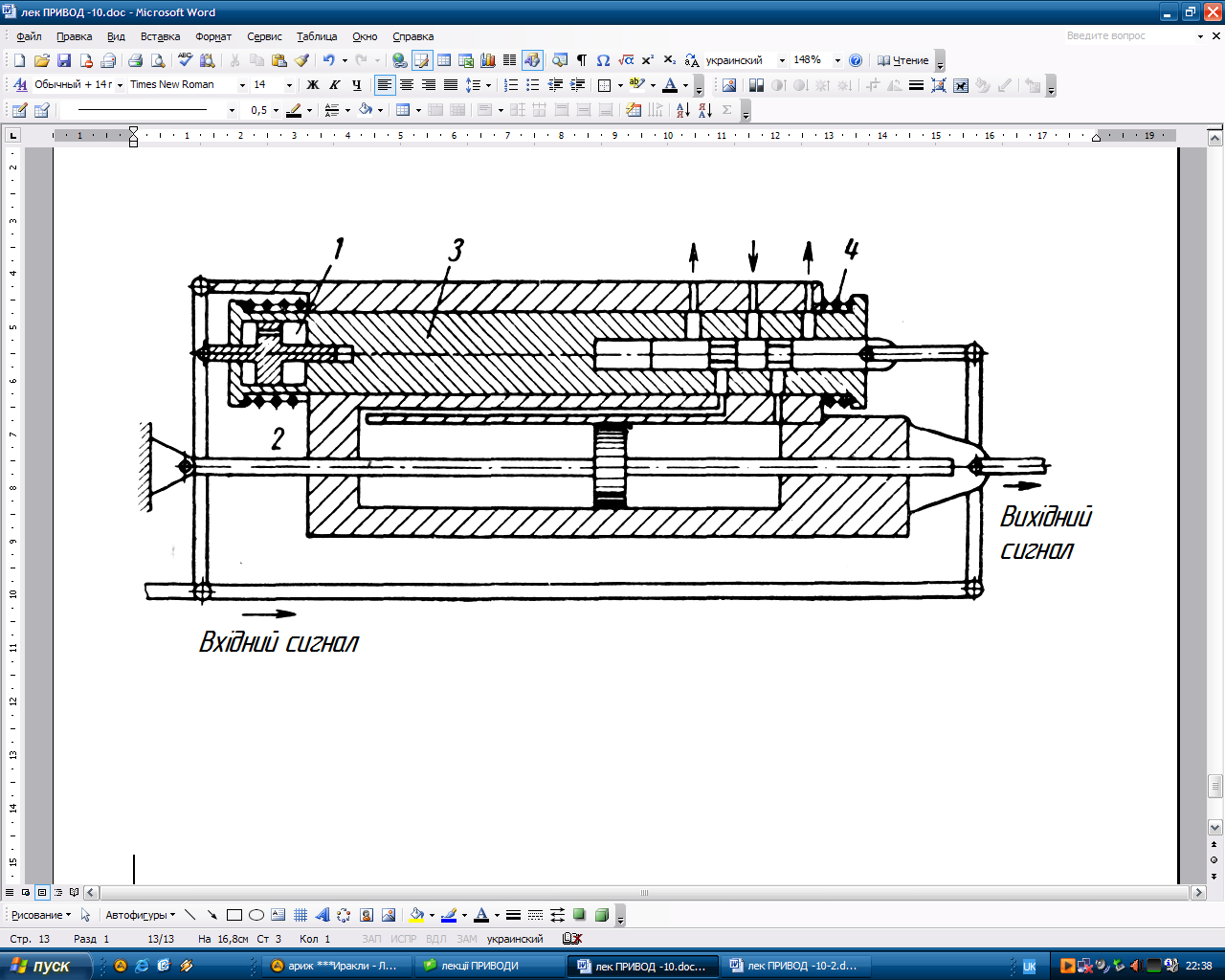
Рис. 20. Сервомеханізм із слідкуванням по похідній переміщення:
1 – циліндр ізодрому; 2 – поршень ізодрому; 3 – золотниковий блок;
4 – пружина золотникового блока