

Глава IV. Синтез цифровых систем управления с регуляторами состояния
IV.1. Общая структура системы управления
Применение микропроцессорной техники открывает возможности для построения систем управления на качественно новом уровне. В первую очередь это относится к возможности создания адаптивных и самонастраивающихся систем, а также систем с перестраиваемыми алгоритмами управления в зависимости от области пространства состояний объекта, что обеспечивает одновременно высокое быстродействие «в большом», т.е. при больших отклонениях выходной переменной от заданной величины, а также заданный вид переходных процессов и высокую точность «в малом», т.е. при малых отклонениях.
Эффективным способом повышения качества управления является применение регуляторов состояний, синтезируемых методами теории пространства состояний. Управление полным вектором состояния объекта управления позволяет формировать требуемый вид переходных процессов. Однако применение такого управления сдерживалось сложностью технической реализации ввиду того, что кроме непосредственно регулятора состояния необходимо иметь, как правило, наблюдатель или идентификатор. Применение микропроцессорной техники позволяет разрешить эту проблему, т.к. регулятор и наблюдатель реализуются на единой технической основе программным путем.
Рассмотрим сходство и различие структур локальных систем управления с традиционными ПИ- и ПИД-регуляторами и систем управления по вектору состояний. Систему с ПИД-регулятором можно представить как объект, охваченный основной интегральной обратной связью с коэффициентом добротности КИ, а также дополнительными обратными связями: пропорциональной КП и дифференциальной КД составляющими для обеспечения необходимых динамических показателей (рис. 4.1, а).
Система с управлением по вектору состояний в области малых отклонений, очевидно, для обеспечения требуемой статической точности должна также иметь основную интегральную обратную связь, а ПД-связи заменяются в этом случае регулятором состояний - РС (рис. 4.1, б). В таком регуляторе осуществляется обратная связь по всем координатам состояния объекта управления. Коэффициенты обратных связей представлены в этом случае в виде матрицы - строки К=[k1, k2, …, kn].
Избежать технических
сложностей, связанных с необходимостью
измерения всех координат состояния
объекта, как уже отмечалось, можно за
счет применения наблюдателя. Блок-схема
такой системы представлена на рис.4.1,в,
где через
![]() обозначен вектор наблюдения состояний
объекта. Замена непосредственного
измерения состояний объекта их наблюдением
не влияет на синтез регулятора состояний,
т.к. динамика системы «объект + регулятор»,
как будет доказано ниже, и динамика
наблюдателя обладают свойствами
разделимости.
обозначен вектор наблюдения состояний
объекта. Замена непосредственного
измерения состояний объекта их наблюдением
не влияет на синтез регулятора состояний,
т.к. динамика системы «объект + регулятор»,
как будет доказано ниже, и динамика
наблюдателя обладают свойствами
разделимости.
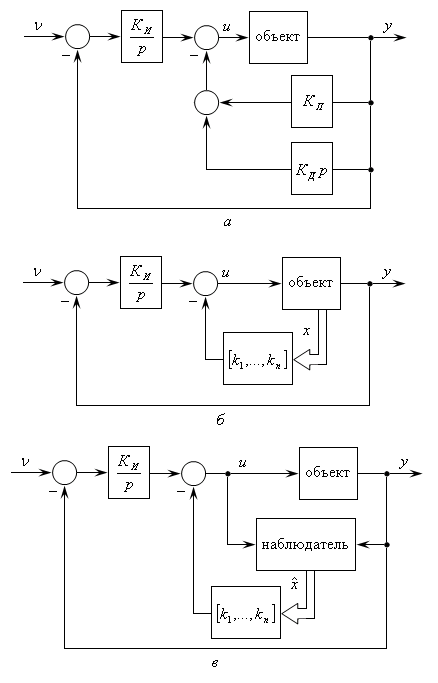
Рис. 4.1. Локальные системы управления, построенные на основе:
а – ПИД-регулятора; б – регулятора состояния;
в – регулятора состояния и наблюдателя
Между принципами действия регуляторов состояния и типовых регуляторов имеется прямая связь. Рассмотрим это на следующем примере.
Пусть дан объект управления с передаточной функцией
![]() .
(4.1)
.
(4.1)
Свободное движение такого объекта определяется характеристическим полиномом
![]() .
.
Требуется обеспечить качество переходных процессов, которое определяется эталонным (желаемым) характеристическим полиномом
![]() .
(4.2)
.
(4.2)
Коэффициенты эталонного полинома определяются из требований к качеству переходных процессов свободного движения. Например, если требуется, чтобы переходные процессы были апериодическими, необходимо, чтобы все корни уравнения (или полюса эталонной передаточной функции)
![]()
были действительные. Величины этих корней определяются из допустимой длительности переходных процессов. Наиболее часто применяемые стандартные полиномы и методы расчёта их коэффициентов, исходя из требований к переходным процессам, даны в Приложении 3.
Решить поставленную задачу синтеза можно с помощью пропорционально-дифференциального регулятора, степень которого определяется порядком объекта управления, а именно
![]() .
.
Система с таким регулятором представлена на рис. 4.2.
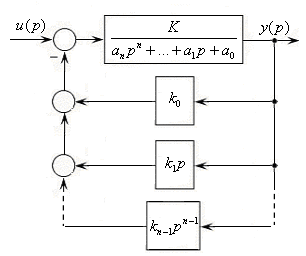
Рис. 4.2. Система с ПДn-1-регулятором
Результирующая передаточная функция замкнутой системы будет иметь вид
![]() .
.
Применив правила объединения передаточных функций для системы на рис.4.2, получим
 .
(4.3)
.
(4.3)
Из равенства коэффициентов характеристического уравнения передаточной функции замкнутой системы (4.3) и эталонного характеристического уравнения (4.2) достаточно просто определяются необходимые коэффициенты обратных связей или ПДn-1-регулятора
![]() . (4.4)
. (4.4)
Однако практическая реализация такого, на первый взгляд, простого регулятора наталкивается на принципиально непреодолимое препятствие – необходимость получения производных первого, второго и выше порядков от выходного сигнала объекта.
Разрешить эту проблему позволяет применение регулятора состояния. Для этого представим описание объекта в фазовом пространстве состояний (см. параграф 3.1)
![]() ,
(4.5)
,
(4.5)
где  .
.
Уравнение регулятора состояния, которое обеспечивает требуемые переходные процессы, будет описываться следующим образом
![]() ,
(4.6)
,
(4.6)
где V – задающий сигнал (скалярная величина);
![]() - матрица-строка
коэффициентов обратных связей по
внутренним координатам объекта.
- матрица-строка
коэффициентов обратных связей по
внутренним координатам объекта.
Структурная схема системы с таким регулятором состояния представлена на рис. 4.3.
Подставив в (4.5) выражение (4.6), получим матрично-векторное уравнение замкнутой системы регулирования
![]() (4.7)
(4.7)
или
![]() ,
,
где  .
.
Следовательно, характеристический полином замкнутой системы будет иметь следующий вид
![]() .
(4.8)
.
(4.8)
Получим выражения для коэффициентов РС-регулятора состояния
![]() .
(4.9)
.
(4.9)
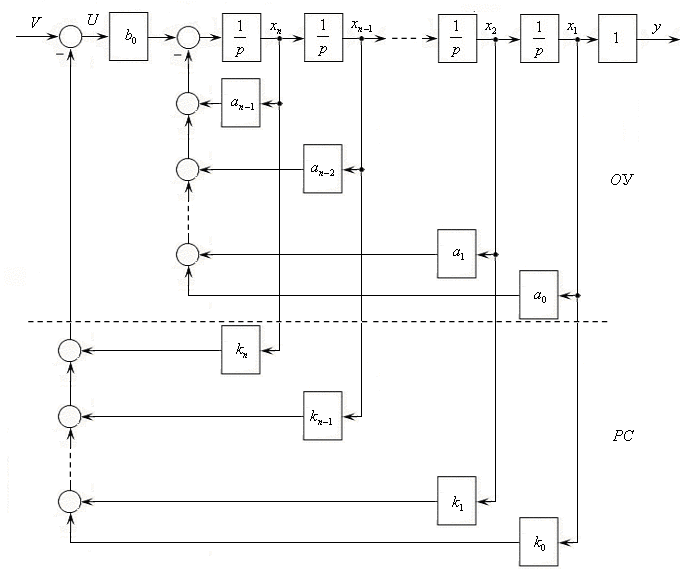
Рис. 4.3. Структурная схема замкнутой системы управления
«объект + регулятор состояния», представленная в развёрнутом виде
Из сравнения выражений (4.4) и (4.9) видно, что коэффициенты ПДn-1- регулятора и коэффициенты регулятора состояния РС совпадают. Отличаются только индексы коэффициентов: в РС они на единицу больше, т.к. совпадают с индексами переменных состояния объекта, а в ПДn-1-регуляторе совпадают с индексами коэффициентов характеристического уравнения.
Таким образом,
![]() ,
где i
= 1,2 … n.
,
где i
= 1,2 … n.
В общей векторной форме структурная схема замкнутой системы «объект управления + регулятор состояния» (ОУ + РС) представлена на рис.4.4.
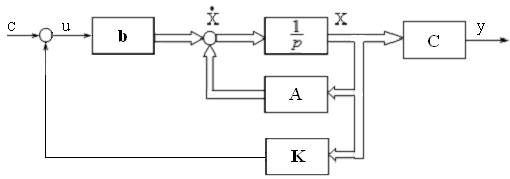
Рис. 4.4. Структурная схема замкнутой системы управления
«объект + регулятор состояния», представленная в векторной форме
Преимущество регулятора состояния РС заключается в том, что не требуется дифференцирование выходного сигнала объекта. Однако при этом возникает другая принципиально разрешимая проблема – необходимо измерять все внутренние координаты состояния объекта. Если технически невозможно или нецелесообразно измерять внутренние координаты РС, то они могут быть вычислены (наблюдаемы), как показано на рис. 4.1,в, с помощью наблюдателя состояния объекта. Это значительно упрощает техническую реализацию замкнутой системы, и в этом заключается одно из главных преимуществ, которые дает применение регулятора состояния.
Если объект управления имеет полюса, то передаточная функция будет иметь вид
 .
(4.10)
.
(4.10)
Для того чтобы иметь возможность управлять и полюсами и нулями, т.е. и свободным и вынужденным движениями объекта управления, регулятор состояния должен содержать дополнительно прямые связи воздействий. Следовательно, уравнение регулятора состояния в общем случае будет иметь вид:
![]() ,
(4.11)
,
(4.11)
где V – вектор задающих воздействий;
М и К – матрицы коэффициентов прямых и обратных связей.