

Глава III
Синтез цифровых систем управления
методом пространства состояний
III.1. Представление моделей объектов управления
в пространстве состояний
Удобным и единообразным по форме является представление математической модели объекта в виде системы дифференциальных уравнений первого порядка, разрешенных относительно первых производных, т.е. уравнений в форме Коши. Для этого необходимо ввести дополнительные переменные, называемые переменными или координатами состояния объекта. Модель объекта в этом случае будет определяться через функциональную связь трех видов переменных: входных ui, выходных yi и внутреннего состояния хi.
![]() (3.1)
(3.1)
где FC и FB – функции состояния и выхода объекта;
U, X, Y – векторные величины, компонентами которых являются переменные ui, xi, yi.
Чтобы лучше разобраться в особенностях описания объекта через переменные состояния, рассмотрим уравнение первого порядка
![]() (3.2)
(3.2)
Введем обозначение y = x и представим уравнение (3.2) в форме (3.1.)

![]() (3.3)
(3.3)
![]() .
.
Структурная схема системы (3.3) представлена на рис. 3.1, а.
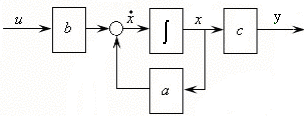
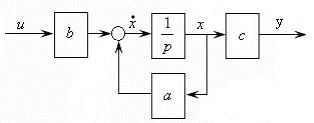
а)непосредственная форма описания б) символьная форма описания
Рис. 3.1.Структурная схема описания объекта регулирования первого
порядка с использованием переменной состояния х
Чаще всего операцию интегрирования всех структурных схем обозначают через оператор 1/р. (см. рис. 3.1, б) Объект, описываемый дифференциальным уравнением n-го порядка, через переменные состояния будет представляться
n- дифференциальными уравнениями первого порядка (в форме Коши)
 (3.4)
(3.4)
где х1, … хn – переменные или координаты состояния.
Кроме того, согласно (3.1), требуется уравнение выхода, которое в общем случае будет иметь следующий вид
![]() (3.5)
(3.5)
Уравнения (3.4) и (3.5) справедливы для объекта с одним входом и одним выходом, т.е. когда y, u – скалярные величины. Эти уравнения удобно представить в матричной форме (сводка обозначений и сведения из теории матриц даны в Приложении).
 (3.6)
(3.6)
![]() ,
,
где Т – знак транспонирования.
Система (3.6) может быть записана в сжатой форме
![]() (3.7)
(3.7)
где
![]() - векторная переменная, называемая
вектором состояния;
- векторная переменная, называемая
вектором состояния;
U, y – скалярные переменные;
А – квадратная матрица коэффициентов размерностью n x n;
B – матрица-столбец размерностью n x 1;
С – матрица-строка размерностью 1 х n.
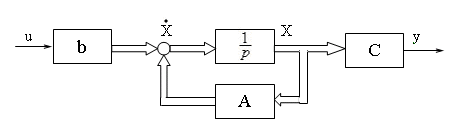
Рис. 3.2. Структурная схема описания n-ого объекта с
использованием вектора состояний Х
Матрица А называется переходной или собственной матрицей объекта, матрицы B и С соответственно – входной и выходной матрицами. Система (3.7) подобна по форме системе (3.3). Соответственно она имеет подобную структурную схему (рис. 3.2). Отличие заключается в замене скалярной величины х вектором Х и заменой коэффициентов матрицами. Широкой стрелкой обозначаются направления действия векторных величин, узкой – скалярных.
В качестве примера рассмотрим описание электрического четырехполюсника, представленного на рис. 3.3, через координаты состояния.

Рис. 3.3. Электрическая схема четырехполюсника
За координаты состояния примем напряжения на конденсаторах
![]() (3.8)
(3.8)
Исходя из схемы
на рис. 3.3 можно записать следующие
уравнения равновесия![]()
Учитывая, что
![]()
и введя обозначения (3.8), получим

Представим эту систему в виде (3.4)
 (3.9)
(3.9)
или в матричной форме, как система (3.6),
 (3.10)
(3.10)
Структурные схемы четырехполюсника, соответствующие системам (3.9) и (3.10), представлены соответственно на рис. 3.4,а и рис.3.4,б.
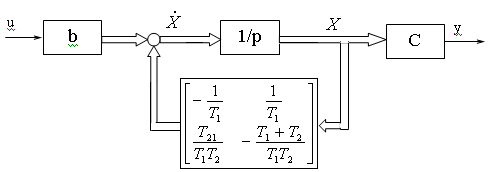
а)
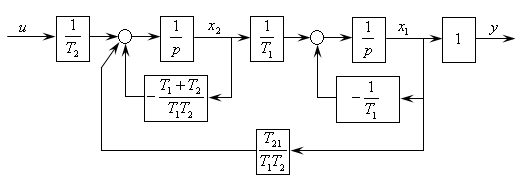
б)
Рис. 3.4 Структурная схема четырехполюсника
а) в матричной форме, б) в структурно-операторной форме
В качестве второго примера, рассмотрим электродвигатель постоянного тока, который наиболее часто применяется в качестве исполнительного устройства.
Запишем уравнение механического равновесия для электродвигателя в соответствии со вторым законом Ньютона
![]()
Уравнение движущего момента по закону Фарадея
![]()
Уравнение Кирхгофа для напряжений в якорной цепи двигателя
![]()
В этих уравнениях обозначено L, R – индуктивность и сопротивление якорной цепи;
Се, СМ – конструктивные постоянные двигателя.
Из уравнений не сложно получить систему в форме Коши (3.4)
 (3.11)
(3.11)
Обозначив внешние воздействия через u1 = u; u2 = MH; выходные сигналы через y1 = : y2 = , и взяв за координаты состояния следующие сигналы x1 = ; x2 = ; x3 = I, получим систему вида (3.6):
 (3.12)
(3.12)

В отличие от (3.6) в системе (3.12) входные и выходные сигналы представлены двухмерными векторами.
Соответствующую размерность имеют и коэффициенты матрицы В и С.
Электродвигатель можно представить также относительно скалярных величин входа и выхода. Для этого за выходную координату принимается одна переменная – угол поворота , а внешние воздействия разделяются на два класса: управляющие u и возмущающие f. В этом случае система (3.7) приобретает следующий вид:
 (3.13)
(3.13)
В рассматриваемом примере u = UЯ; f = MH – скалярные величины.