

18.1.52. Стабилизация управляемых колес.
Стабилизирующий момент, стремящийся удерживать управляемые колеса автомобиля в положении прямолинейного движения, необходим для повышения курсовой устойчивости автомобиля и создания у водителя так называемого чувства дороги. Чувство дороги заключается в информировании водителя об угле поворота управляемых колес, а также о величине боковых сил, приложенных к ним, и реализуется за счет того, что реактивный крутящий момент, действующий со стороны рулевого колеса на руки водителя, пропорционален стабилизирующему моменту.
Скоростная стабилизация управляемых колес. Создание стабилизирующего момента возможно несколькими способами. Общеизвестным является так называемый эффект рояльной ножки, при котором ведомое колесо стабилизируется за счет того, что вертикальная ось поворота вынесена вперед относительно точки контакта колеса с опорной поверхностью. Однако на автомобилях такой вынос оси поворота в чистом виде применяется крайне редко. Более удобным оказалось получение стабилизирующего момента путем продольного наклона шкворня или оси поворота колес при бесшкворневой подвеске на угол у {рис. 13.26). Угол Y называется углом продольного наклона шкворня. Действующая на автомобиль боковая сила (центробежная на повороте, сила бокового ветра и т.п.) распределяется между всеми его колесами в виде боковых сил Fд§, в ответ на которые в пятне контакта колес с дорогой возникают боковые реакции Ry (рис. 13.26). При наличии продольного наклона шкворня между силами Fд и Ry имеется плечо h, называемое плечом стабилизации, благодаря чему создается стабилизирующий момент Мст, стремящийся повернуть колесо вокруг шкворня. Этот момент обладает двумя важными свойствами:
— его величина пропорциональна величине боковой силы, действующей на автомобиль;
—
 направление
стабилизирующего момента таково,
что при возникновении самопроизвольного
поворота автомобиля (см. стрелка Б
на
рис.
13.26) он
стремится самостоятельно, без участия
водителя повернуть колеса в сторону,
соответствующую уменьшению кривизны
траектории. Таким образом, указанный
стабилизирующий момент не только
уменьшает самопроизвольное виляние
управляемых колес и информирует
водителя о величине внешней боковой
силы, приложенной к автомобилю, но
также в некоторых случаях самостоятельно
частично корректирует траекторию
автомобиля. Поскольку причиной описанного
стабилизирующего момента являются
боковые силы и боковые реакции колес
автомобиля, а в большинстве случаев
боковая сила проявляет себя в виде
центробежной силы, величина которой
и, следовательно, величина стабилизирующего
момента зависит от второй степени
скорости автомобиля, данный
вид стабилизации
управляемых колес называют
скоростной стабилизацией.
Скоростная стабилизация возникает не
только вследствие специальных
конструктивных мероприятий, но и
самопроизвольно из-за эластичности шин
автомобиля. Одним
из важнейших следствий эластичности
является увод шин.
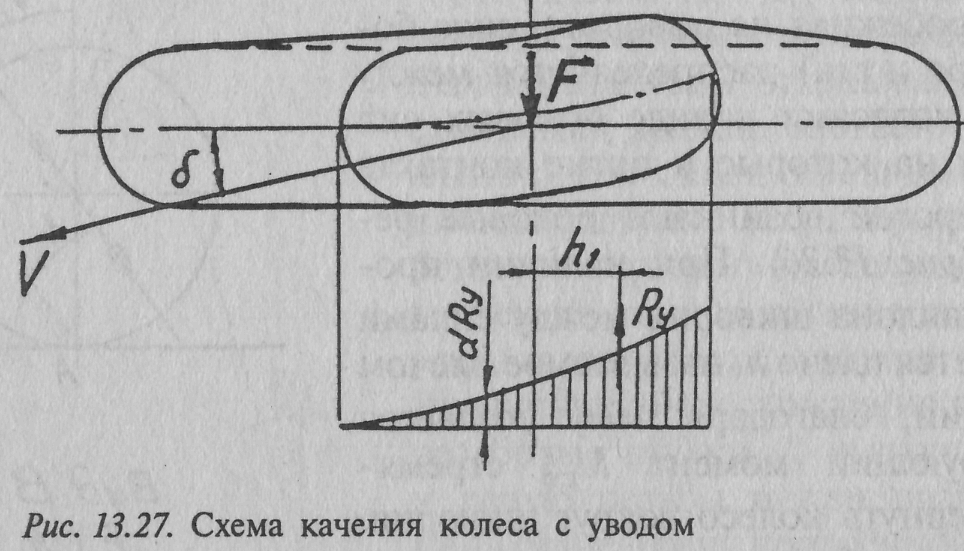
Рассмотрим качение автомобильного
колеса, к которому приложена боковая
сила F5.
На
рис.
13.27 показана
схема появления в пятне контакта шины
с дорогой элементарных боковых реакций
(элементарных сил трения) dRY.
Передние
части протектора катящейся шины,
начинающие входить в контакт с дорогой,
еще не нагружены боковыми реакциями.
По мере смещения этих участков по пятну
контакта назад их нагруженность боковыми
реакциями dRy
возрастает,
в связи с чем эпюра распределения
элементарных сил dRy
вдоль
пятна контакта шины с дорогой имеет
близкую к треугольной форму. Равнодействующая
боковых реакций RY
смещена
на расстояние hx
относительно
оси колеса, к которой приложена сила
Fg.
Так как деформация элементов шины в
боковом направлении пропорциональна
их нагружению силами dRY,
отпечаток
шины на дороге приобретает вместо
овальной прогнутую, бочкообразную
форму, а вектор скорости качения колеса
Котклоняется от плоскости вращения
колеса на угол 8. Такое явление получило
название бокового увода, а угол 8 —
угла увода. Реакция же RY
на
плече At
создает
момент, который по способу возникновения
и производимому эффекту полностью
эквивалентен описанному выше
стабилизирующему моменту, вызванному
продольным наклоном шкворня, и при
движении автомобиля складывается с
ним. Это может привести к появлению
чрезмерного стабилизирующего момента,
утяжеляющего управление автомобилем.
Поэтому часто продольный угол наклона
оси поворота колеса делают весьма малым,
равным нулю или иногда даже отрицательным.
С другой стороны, поворот колеса вокруг
наклоненного шкворня приводит к изменению
развала колес, что может оказаться
весьма полезным. Так, в большинстве
независимых подвесок при поворотах
колеса автомобиля вместе с кузовом
наклоняются наружу относительно
центра поворота. Такой наклон уменьшает
сопротивление колес действию боковой
силы Fд
(увеличивается
величина угла увода д).
Для исправления этого положения
необходимо, чтобы наружное колесо,
воспринимающее большую боковую силу,
будучи повернутым внутрь, имело бы
отрицательный или, по крайней мере,
уменьшенный положительный развал. Это
может быть обеспечено за счет продольного
наклона оси поворота колес. Однако,
поскольку простое увеличение этого
угла может вызвать чрезмерный
стабилизирующий момент, на легковых
автомобилях, имеющих эластичные
шины, отличающиеся большим стабилизирующим
моментом, эту ось, для
уменьшения
плеча h
иногда
смещают назад. Весовая
стабилизация управляемых колес.
Скоростная
стабилизация весьма полезна как с точки
зрения повышения курсовой устойчивости
движения автомобиля, так и с точки зрения
обеспечения водителю чувства дороги.
Но этот эффект незаметен при движении
с малыми скоростями, когда на автомобиль
не действуют заметные боковые силы.
Поэтому наряду со скоростной стабилизацией
применяют другой вид стабилизации
управляемых колес, осуществляемый путем
наклона осей поворота колес в поперечной
плоскости внутрь автомобиля (угол (3 на
рис.
13.29). При
рассмотрении природы этого эффекта для
упрощения принимают, что контакт колеса
с дорогой точечный, а угол развала колес
и угол продольного наклона шкворня
отсутствуют. Возникновение
стабилизирующего момента при этом
объясняется тем, что точка контакта
колеса с дорогой (точка С) при вращении
рулевого колеса движется по окружности
с центром 02,
вследствие
чего колесо стремится внедриться в
дорогу. Ввиду невозможности такого
внедрения, передняя часть автомобиля
приподнимается, и ее потенциальная
энергия величивается. Но все тела и
системы, составленные из тел, стремятся
к уменьшению своей потенциальной
энергии, что в данном случае приводит
|к стремлению управляемых колес под
действием веса передней части автомобиля
занять среднее положение. Отсюда вытекает
и название этого вида стабилизации
- весовая.
Однако такое объяснение не учитывает
ряд факторов, вследствие чего может
создаться впечатление, что при нулевом
или отрицательном плече обкатки
(плечо а
на
рис.
13.29) стабилизирующий
эффект неминуемо должен исчезнуть. На
самом деле из-за наличия продольного
наклона оси поворота колес и большой
ширины пятна контакта шины с опорной
поверхностью весовая стабилизация при
уменьшении плеча обкатки уменьшается,
но полностью не исчезает даже при нулевых
и небольших отрицательных значениях
плеча обкатки. Лишь при больших значениях
отрицательного плеча обкатки
стабилизация превращается в дестабилизацию,
но этот эффект является несущественным
на фоне скоростной стабилизации
управляемых колес.
направление
стабилизирующего момента таково,
что при возникновении самопроизвольного
поворота автомобиля (см. стрелка Б
на
рис.
13.26) он
стремится самостоятельно, без участия
водителя повернуть колеса в сторону,
соответствующую уменьшению кривизны
траектории. Таким образом, указанный
стабилизирующий момент не только
уменьшает самопроизвольное виляние
управляемых колес и информирует
водителя о величине внешней боковой
силы, приложенной к автомобилю, но
также в некоторых случаях самостоятельно
частично корректирует траекторию
автомобиля. Поскольку причиной описанного
стабилизирующего момента являются
боковые силы и боковые реакции колес
автомобиля, а в большинстве случаев
боковая сила проявляет себя в виде
центробежной силы, величина которой
и, следовательно, величина стабилизирующего
момента зависит от второй степени
скорости автомобиля, данный
вид стабилизации
управляемых колес называют
скоростной стабилизацией.
Скоростная стабилизация возникает не
только вследствие специальных
конструктивных мероприятий, но и
самопроизвольно из-за эластичности шин
автомобиля. Одним
из важнейших следствий эластичности
является увод шин.
Рассмотрим качение автомобильного
колеса, к которому приложена боковая
сила F5.
На
рис.
13.27 показана
схема появления в пятне контакта шины
с дорогой элементарных боковых реакций
(элементарных сил трения) dRY.
Передние
части протектора катящейся шины,
начинающие входить в контакт с дорогой,
еще не нагружены боковыми реакциями.
По мере смещения этих участков по пятну
контакта назад их нагруженность боковыми
реакциями dRy
возрастает,
в связи с чем эпюра распределения
элементарных сил dRy
вдоль
пятна контакта шины с дорогой имеет
близкую к треугольной форму. Равнодействующая
боковых реакций RY
смещена
на расстояние hx
относительно
оси колеса, к которой приложена сила
Fg.
Так как деформация элементов шины в
боковом направлении пропорциональна
их нагружению силами dRY,
отпечаток
шины на дороге приобретает вместо
овальной прогнутую, бочкообразную
форму, а вектор скорости качения колеса
Котклоняется от плоскости вращения
колеса на угол 8. Такое явление получило
название бокового увода, а угол 8 —
угла увода. Реакция же RY
на
плече At
создает
момент, который по способу возникновения
и производимому эффекту полностью
эквивалентен описанному выше
стабилизирующему моменту, вызванному
продольным наклоном шкворня, и при
движении автомобиля складывается с
ним. Это может привести к появлению
чрезмерного стабилизирующего момента,
утяжеляющего управление автомобилем.
Поэтому часто продольный угол наклона
оси поворота колеса делают весьма малым,
равным нулю или иногда даже отрицательным.
С другой стороны, поворот колеса вокруг
наклоненного шкворня приводит к изменению
развала колес, что может оказаться
весьма полезным. Так, в большинстве
независимых подвесок при поворотах
колеса автомобиля вместе с кузовом
наклоняются наружу относительно
центра поворота. Такой наклон уменьшает
сопротивление колес действию боковой
силы Fд
(увеличивается
величина угла увода д).
Для исправления этого положения
необходимо, чтобы наружное колесо,
воспринимающее большую боковую силу,
будучи повернутым внутрь, имело бы
отрицательный или, по крайней мере,
уменьшенный положительный развал. Это
может быть обеспечено за счет продольного
наклона оси поворота колес. Однако,
поскольку простое увеличение этого
угла может вызвать чрезмерный
стабилизирующий момент, на легковых
автомобилях, имеющих эластичные
шины, отличающиеся большим стабилизирующим
моментом, эту ось, для
уменьшения
плеча h
иногда
смещают назад. Весовая
стабилизация управляемых колес.
Скоростная
стабилизация весьма полезна как с точки
зрения повышения курсовой устойчивости
движения автомобиля, так и с точки зрения
обеспечения водителю чувства дороги.
Но этот эффект незаметен при движении
с малыми скоростями, когда на автомобиль
не действуют заметные боковые силы.
Поэтому наряду со скоростной стабилизацией
применяют другой вид стабилизации
управляемых колес, осуществляемый путем
наклона осей поворота колес в поперечной
плоскости внутрь автомобиля (угол (3 на
рис.
13.29). При
рассмотрении природы этого эффекта для
упрощения принимают, что контакт колеса
с дорогой точечный, а угол развала колес
и угол продольного наклона шкворня
отсутствуют. Возникновение
стабилизирующего момента при этом
объясняется тем, что точка контакта
колеса с дорогой (точка С) при вращении
рулевого колеса движется по окружности
с центром 02,
вследствие
чего колесо стремится внедриться в
дорогу. Ввиду невозможности такого
внедрения, передняя часть автомобиля
приподнимается, и ее потенциальная
энергия величивается. Но все тела и
системы, составленные из тел, стремятся
к уменьшению своей потенциальной
энергии, что в данном случае приводит
|к стремлению управляемых колес под
действием веса передней части автомобиля
занять среднее положение. Отсюда вытекает
и название этого вида стабилизации
- весовая.
Однако такое объяснение не учитывает
ряд факторов, вследствие чего может
создаться впечатление, что при нулевом
или отрицательном плече обкатки
(плечо а
на
рис.
13.29) стабилизирующий
эффект неминуемо должен исчезнуть. На
самом деле из-за наличия продольного
наклона оси поворота колес и большой
ширины пятна контакта шины с опорной
поверхностью весовая стабилизация при
уменьшении плеча обкатки уменьшается,
но полностью не исчезает даже при нулевых
и небольших отрицательных значениях
плеча обкатки. Лишь при больших значениях
отрицательного плеча обкатки
стабилизация превращается в дестабилизацию,
но этот эффект является несущественным
на фоне скоростной стабилизации
управляемых колес.