

Пожаркова_ТАУ_ЛР_9434
.pdfМинистерство образования и науки Российской Федерации Сибирский федеральный университет
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Учебно-методическое пособие для выполнения лабораторных работ
Красноярск
СФУ
2012
УДК 681.5.01(07) ББК 32.965.5я73
Т-338
Составители: Пожаркова Ирина Николаевна, Чубарь Алексей Владимирович.
Т-338 Теория автоматического управления: учебно-методическое пособие для выполнения лабораторных работ [Электронный ресурс] / сост. И.Н. Пожаркова, А.В.Чубарь. – Электрон. дан. – Красноярск: Сиб. федер. ун-т, 2012. – Систем. требования: PC не ниже класса Pentium I; 128 Mb RAM; Windows 98/XP/7; Adobe Reader V8.0 и выше. – Загл. с экрана.
Методические указания к лабораторным работам по курсу “Теория автоматического управления”.
Предназначено для студентов специальностей 220201.65 – Управление и информатика в технических системах, 220301.65 – Автоматизация технологических процессов и производств (по отраслям), 220100.62 - Системный анализ и управление.
УДК 681.5.01(07) ББК 32.965.5я73
© Сибирский федеральный университет, 2012
Учебное издание
Подготовлено к публикации редакционно-издательским отделом БИК СФУ
Подписано в свет (дата) г. Заказ 9434. Тиражируется на машиночитаемых носителях.
Редакционно-издательский отдел Библиотечно-издательского комплекса Сибирского федерального университета 660041, г. Красноярск, пр. Свободный, 79
Тел/факс (391)206-21-49. E-mail rio@sfu-kras.ru http://rio.sfu-kras.ru
3
ОГЛАВЛЕНИЕ
Лабораторная работа №1. МАТЕМАТИЧЕСКИЕ МОДЕЛИ СИСТЕМ |
|
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ....................................................... |
4 |
Лабораторная работа №2. ПРИМЕНЕНИЕ САПР ПРИ ИССЛЕДОВАНИИ |
|
CИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ.................................... |
24 |
Лабораторная работа №3. ПООПЕРАТОРНАЯ СТРУКТУРНАЯ СХЕМА. |
|
ВЕКТОРНО-МАТРИЧНАЯ ФОРМА ПРЕДСТАВЛЕНИЯ ОБЪЕКТА |
|
УПРАВЛЕНИЯ.............................................................................................. |
35 |
Лабораторная работа №4. ВРЕМЕННЫЕ ХАРАКТЕРИСТИКИ САУ...... |
44 |
Лабораторная работа №5. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ САУ...... |
53 |
Лабораторная работа №6. УСТОЙЧИВОСТЬ ЛИНЕЙНЫХ |
|
НЕПРЕРЫВНЫХ САУ ................................................................................. |
65 |
Лабораторная работа №7. ОЦЕНКА КАЧЕСТВА РЕГУЛИРОВАНИЯ В |
|
ПЕРЕХОДНЫХ РЕЖИМАХ........................................................................ |
76 |
БИБЛИОГРАФИЧЕСКИЙ СПИСОК........................................................... |
81 |
4
Лабораторная работа №1. МАТЕМАТИЧЕСКИЕ МОДЕЛИ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Цель – изучить правила преобразования структурных схем линейных непрерывных систем автоматического управления, получить модель системы в форме дифференциального уравнения.
ОБЩИЕ СВЕДЕНИЯ 1.1.ОБЩИЕ СВЕДЕНИЯ ОБ АВТОМАТИЧЕСКОМ УПРАВЛЕНИИ
Управление - это такая организация того или иного процесса, которая обеспечивает достижение определенных целей. Автоматическое управление - это управление, осуществляемое без участия человека.
Любой процесс управления включает в себя следующие основные этапы:
сбор и обработка информации о положении объекта управления в целях оценки сложившейся ситуации;
принятие решения о наиболее целесообразных действиях, исполнение
принятого решения.
Сбор информации о положении объекта управления заключается в измерении его координат, а также величин задающих и возмущающих воздействий. Для решения этой задачи используются различные измерительные устройства, образующие, так называемую информационноизмерительную подсистему. Обработка полученной информации имеет целью выработку, на основании принятого закона управления, управляющего сигнала, который должен обеспечить достижение цели управления. Обработка информации и принятие решения о необходимых действиях осуществляются в логико-вычислительной подсистеме. Управляющие сигналы, полученные в логико-вычислительной подсистеме, поступают на исполнительную подсистему, которая приводит в действие регулирующие органы объекта управления, которые и решают задачу приведения его в требуемое положение. Совокупность объекта управления и управляющей подсистемы, в которую входят вышеперечисленные устройства (подсистемы) и образует систему автоматического управления (САУ).
Рассмотрим основные принципы автоматического управления.
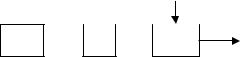
1.Управление по разомкнутой схеме (разомкнутые САУ). Функциональная схема разомкнутой САУ показана на рис.1.1.
f t
g t |
|
u t |
|
y t |
|
|
ЗУ  R
R  ОУ
ОУ
Рис.1.1
Элементы системы:
5
ОУ – объект управления; ЗУ – задающее устройство; R – регулятор.
Координаты (переменные) системы: g t – задающее воздействие;
y t – управляемая (регулируемая) величина; f t – возмущающее воздействие;
u t – управляющее воздействие.
Объект управления (ОУ) - это техническое устройство или технологический процесс, некоторые физические величины которого поддерживаются неизменными или подлежат целенаправленным изменениям.
Задающее устройство предназначено для формирования цели управления путем выработки задающего воздействия.
Регулятор служит для формирования закона управления, в соответствии с которым выдает управляющее воздействие, прикладываемое к объекту управления для перевода последнего в требуемое состояние.
Входными величинами системы являются соответственно задающее и возмущающее воздействия. Задающее воздействие - это воздействие, определяемое целью управления, в соответствии с которым должна изменяться управляемая величина. Возмущающее воздействие представляет собой воздействие внешней среды на объект управления и, как правило, оказывает на него негативное влияние. Оно бывает объективно существующим и случайным.
Выходной координатой системы является управляемая или регулируемая величина. Эта величина характеризует состояние объекта управления и подлежит стабилизации или изменению заданным образом в соответствии с целью управления.
Для того чтобы управляемая величина принимала требуемые значения, необходимо к объекту управления приложить воздействие u t – управляющее воздействие. Управляющее воздействие формируется регулятором и прикладывается к объекту управления для того, чтобы последний перешел в нужное состояние. Следовательно, задача управления и состоит в формировании управляющего воздействия. В разомкнутой системе, как следует из принципа разомкнутого цикла и функциональной схемы, регулятор формирует управляющее воздействие только на основе задающего воздействия, т.е.
u(t) F g(t) .
Данное выражение представляет собой закон управления разомкнутой системы. Закон управления - это алгоритм или функциональная зависимость, в соответствии с которой регулятор формирует управляющее воздействие.
Разомкнутым системам присущи следующие недостатки:
6
инвариантность (независимость) параметров состояния обеспечивается только по отношению к тем компонентам вектора возмущений, которые могут быть измерены;
инвариантность по отношению к контролируемым (задающим) воздействиям обеспечивается только при строгом соответствии параметров объекта управления и управляющей подсистемы их
расчетным значениям.
Точное измерение всех координат вектора возмущений - задача невыполнимая. Параметры объекта управления в процессе эксплуатации меняются случайным образом и проконтролировать этот процесс большей частью невозможно. Все это приводит к тому, что разомкнутая система не может с высокой точностью решить задачу управления. Такие системы не нашли практического применения.
2.Управление по замкнутой схеме (замкнутые САУ).
Принцип замкнутого цикла (принцип обратной связи) заключается в
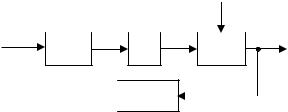
том, что закон управления формируется на основе отклонения управляемой величины от задающего воздействия. Такое управление называется управлением по отклонению, при котором управляемая величина оказывает влияние на управляющее воздействие. Система, реализующая этот принцип, называется замкнутой или системой управления с обратной связью. Функциональная схема замкнутой системы изображена на рис.1.2.
|
|
|
|
|
|
f t |
|
|
|
g t |
|
t |
|
u t |
|
|
y t |
ЗУ |
СУ |
R |
|
ОУ |
||||
|
|
|
|
|
|
|
|
|
 ИПУ
ИПУ
Рис.1.2
Элементы системы: ОУ – объект управления; ЗУ – задающее устройство;
ИПУ - измерительно-преобразовательное устройство; СУ - сравнивающее устройство;
R – регулятор.
Координаты (переменные) системы: g t – задающее воздействие;
y t – управляемая (регулируемая) величина; f t – возмущающее воздействие;
t - рассогласование (ошибка); u t – управляющее воздействие.
7
Для получения замкнутой системы требуется разомкнутую систему “замкнуть” путем введения в нее дополнительных устройств: измерительнопреобразовательного и сравнивающего. Измерительно-преобразовательное устройство служит для измерения (наблюдения) управляемой величины и преобразования к виду, удобному для обработки и передачи. ИПУ реализует обратную связь, то есть связь причины и следствия, которая позволяет формировать управляющее воздействие с учетом результата управления.
Сравнивающее устройство предназначено для сравнения управляемой величины с задающим воздействием и выдачи результата сравнения в виде сигнала рассогласования
(t) g(t) y(t).
Рассогласование представляет собой отклонение управляемой величины от задающего воздействия, т.е. является ошибкой системы, и служит источником формирования регулятором управляющего воздействия. Следовательно, закон управления в замкнутой системе является функцией рассогласования
u(t) F (t) .
Управляющее воздействие прикладывается к объекту управления до тех пор пока (t) 0. Таким образом, замкнутая система работает так, чтобы все время сводить к нулю рассогласование (t).
Принцип замкнутого цикла (обратной связи) – основной принцип управления. Он лежит в основе подавляющего большинства систем управления, так как решающую роль при управлении играет информация о результатах управления.
Так как величина отклонения от заданного значения содержит обобщенную информацию о влиянии всех компонентов случайных возмущений и отклонениях параметров объекта от расчетных значений, то замкнутые системы свободны от недостатков разомкнутых систем и именно поэтому они получили самое широкое распространение. Практически всегда САУ является замкнутой.
Если имеется возможность точно измерить какие-либо компоненты возмущающего воздействия, то можно ввести в систему дополнительные сигналы и формировать управляющее воздействие как функции и отклонения, и измеренных возмущений. Такие системы используют оба изложенных принципа управления и называются комбинированными.
Реализация принципа управления по отклонению возможна только при замыкании цепи отрицательной обратной связи, т.е. цепи от выхода объекта управления до входа логико-вычислительной подсистемы, т.е. входа системы в целом. Эта обратная связь называется главной и всегда является отрицательной. Относительным недостатком замкнутых систем является их склонность к возникновению колебаний, что является следствием наличия обратной связи.
8
В свете рассмотренного выделим следующие основные задачи теории автоматического управления (ТАУ):
Разработка методов анализа САУ.
Разработка методов синтеза САУ, удовлетворяющих заданным требованиям.
Разработка принципов построения и методов коррекции динамических свойств САУ.
1.2.КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Системы автоматического управления можно классифицировать по следующим признакам.
По наличию или отсутствию дополнительных источников энергии САУ подразделяются на системы прямого и непрямого регулирования. Системы прямого регулирования - это системы, в которых для приведения в действие регулирующих органов не требуются дополнительные источники энергии, т.е. чувствительный элемент непосредственно перемещает регулирующий орган.
В противном случае САУ является системой непрямого регулирования. Эти САУ используются в подавляющем числе случаев, так как практически всегда сигнал ошибки (t) недостаточен по мощности для управления регулирующим органом.
По характеру сигналов, циркулирующих в системе, САУ подразделяются на непрерывные (аналоговые), дискретные и дискретнонепрерывные (гибридные).
По виду уравнений, описывающих систему, САУ подразделяются на линейные и нелинейные.
По характеру изменения задающего воздействия САУ делятся на системы стабилизации, следящие системы и системы программного регулирования.
Системы стабилизации - это САУ, которые обеспечивают поддержание требуемого значения регулируемой величины относительно неизменного значения задающего воздействия.
Следящие системы предназначены для изменения регулируемой величины по закону, который заранее неизвестен, т.к. в общем случае величина задающего воздействия изменяется во времени и это изменение может быть случайным.
Программные САУ - это системы, в которых задающее воздействие изменяется по заданной программе.
Нетрудно заметить, что системы стабилизации и программные САУ являются частным случаем следящих систем.
9
По величине и характеру ошибки (t) САУ бывают статическими и
астатическими.
Всистемах, статических по отношению к какому-либо воздействию, ошибка, вызванная этим воздействием, по окончанию процесса регулирования становится равной некоторой постоянной величине, называемой статической ошибкой.
Всистемах, астатических по отношению к какому-либо воздействию, ошибка, вызванная этим воздействием, по окончании процесса регулирования становится равной нулю.
По числу замкнутых контуров регулирования САУ бывают одноконтурными и многоконтурными.
По характеру зависимости коэффициентов дифференциальных уравнений, описывающих систему от времени, САУ бывают стационарными и нестационарными. В стационарных САУ указанные коэффициенты не зависят от времени.
С точки зрения возможностей изменения параметров управляющей подсистемы, в зависимости от изменяющихся в процессе функционирования параметров объекта управления, САУ бывают обыкновенными и самонастраивающимися (адаптивными).
1.3.МАТЕМАТИЧЕСКИЕ МОДЕЛИ САУ
Математическим аппаратом исследования САУ являются дифференциальные уравнения, которые описывают движение системы и являются уравнениями динамики. Из уравнений динамики, положив все производные равными нулю, можно получить уравнения статики, которые описывают поведение системы в установившемся режиме.
Дифференциальные уравнения САУ и ее элементов, составленные в соответствии с физическими законами их функционирования и факторами, от которых зависят переменные уравнений, практически всегда являются нелинейными. Дифференциальные уравнения САУ, записанные в виде системы уравнений или одного дифференциального уравнения высокого порядка представляют собой математическую модель системы.
Математическая модель является основой для анализа свойств системы и степени их соответствия поставленным требованиям. Итак, исходная математическая модель САУ является нелинейной. Отсутствие однозначных аналитических методов решения нелинейных дифференциальных уравнений не позволяет создать какие-либо общие эффективные методы анализа и синтеза САУ. Именно это и послужило причиной развития идеи линеаризации, т.е. замены исходной нелинейной модели линейной, близкой по решению к исходной модели в определенном диапазоне изменения начальных условий и параметров. Линеаризация проводится по методу
10
малого отклонения, который основан на разложении нелинейных функций в ряд Тейлора.
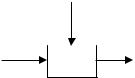
Рассмотрим объект управления (рис.1.3), входными величинами которого являются управляющее u t и возмущающее f t воздействия, а выходной - управляемая величина y t .
f t
u t |
|
y t |
|
ОУ
Рис.1.3
Пусть в результате линеаризации получено линейное дифференциальное уравнение ОУ (1.1), определяющее линейную модель объекта.
a |
0 |
y |
(n) (t) a y(n 1) (t) a |
2 |
y |
(n 2) (t) ... a |
n |
y(t) |
|
||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||
b u(m) (t) bu(m 1) |
(t) b u(m 2) |
(t) ... b |
u(t) |
(1.1) |
|||||||||||
|
|
0 |
1 |
|
|
|
|
2 |
|
|
|
|
m |
|
|
c |
f (k) (t) c |
f (k 1) |
(t) c |
2 |
f (k 2) |
(t) ... c |
k |
f (t). |
|
||||||
|
|
0 |
1 |
|
|
|
|
|
|
|
|
|
|
||
Сложность решения дифференциальных уравнений высокого порядка без применения вычислительной техники и невозможность на основании численных решений создать общие методы анализа и синтеза систем привели к широкому использованию методов, связанных с применением математического аппарата преобразований Лапласа и Фурье.
При использовании преобразования Лапласа некоторой функции времени f(t) ставится в однозначное соответствие функция F(p), где p - оператор Лапласа. Функция времени f(t) называется оригиналом, а функция F(p) ее изображением. Изображение и оригинал связаны соотношением
F(p) f (t) e ptdt.
0
Ниже приведены некоторые теоремы преобразования Лапласа, которые будут использованы в дальнейшем.
1.Теорема линейности. Для любых действительных или комплексных функций
B u(t) C f (t) B U(p) C F(p). |
(1.2) |
2. Теорема запаздывания. Для любого постоянного 0
f(t ) e ptF(p).
3.Теорема дифференцирования оригинала. Если f (t) F(p), то
f (t) pF(p) f (0).
Применив эту теорему к производным высших порядков, получим f (n) (t) pnF(p) pn 1 f (0) pn 2 f '(0) ... f (n 1) (0).