

Пожаркова_ТАУ_ЛР_9434
.pdf31 |
|
Для работы с выражениями, содержащими |
|
переменные, в частности для упрощения выражений, |
|
используются команды меню Simbolic (рис.2.18). |
|
Наиболее часто используемые при аналитических |
|
расчетах: simplify (упростить), expand (раскрыть |
|
скобки), collect (привести подобные слагаемые по |
|
указанной переменной), float (округление до |
Рис.2.18 |
заданного числа знаков). |
На рис.2.19 приведены примеры использования перечисленных команд. Следует отметить, что большинство команд меню Simbolic обрабатывают как выражения, заданные в явном виде, так и заданные при помощи функций.
Рис.2.19
2. Решение уравнений, систем уравнений, неравенств.
Для решения уравнений, систем уравнений, неравенств в Mathcad (рис.2.20) используется команда solve меню Simbolic (рис.2.18).
Рис.2.20

32
3. Нахождение обратного преобразования Лапласа.
Для выполнения обратного преобразования Лапласа для заданного выражения (рис.2.21) используется команда invlaplace меню Simbolic.
Рис.2.21
4.Замена переменной.
Для подстановки в выражение вместо указанной переменной
некоторого другого выражения или константы (рис.2.22) используется команда substitute меню Simbolic.
Рис.2.22
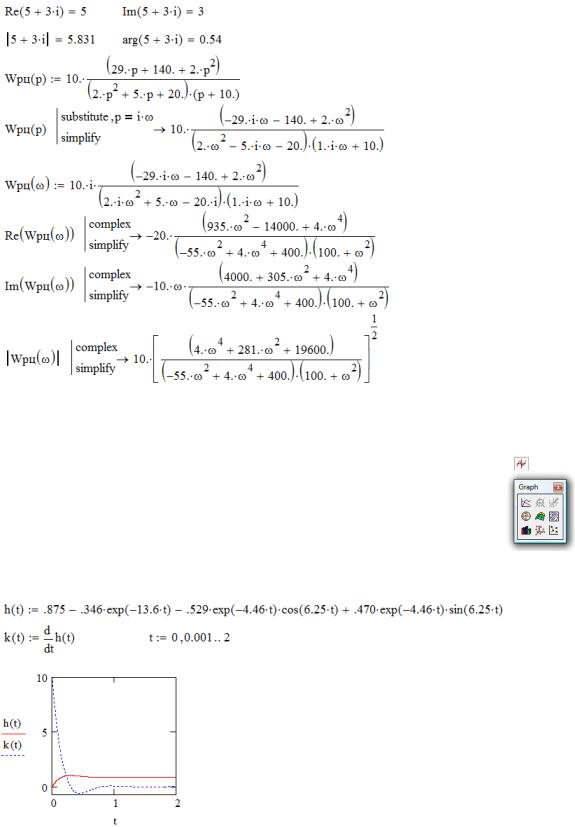
5. Комплексные функции.
Мнимая единица в Mathcad задается комбинацией клавиш «1i». Вычисление значений выражений с комплексными константами осуществляется непосредственным нажатием на клавишу «=». Для работы c комплексными функциями (вычисление действительной и мнимой частей, амплитуды, фазы) (рис.2.23) используется команда complex меню Simbolic.
33
Рис.2.23
6. Построение графиков.
Для вставки графика используется меню Graph
(рис.2.24). |
|
Перед графиком может быть задан диапазон и шаг |
|
изменения переменной (рис.2.25). Для добавления на |
|
график еще одной функции (аргумента), после ее |
Рис.2.24 |
описания, нужно нажать клавишу «,». |
Рис.2.25
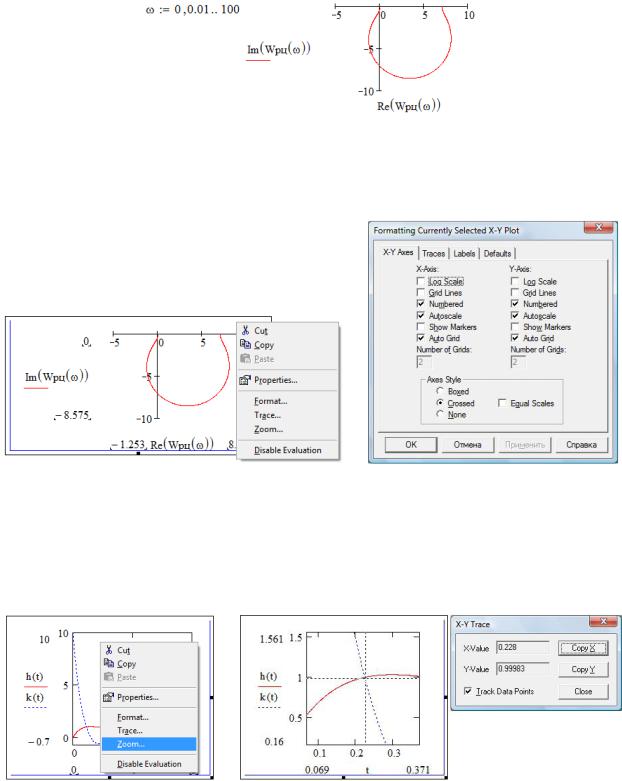
Функции по обеим осям могут быть заданы параметрически (рис.2.26).
34
Рис.2.26
Параметры графика (линии сетки, тип осей, тип и толщина линий и т.д.) редактируются в меню Format (рис.2.28), вызываемом из контекстного меню (рис.2.27) или двойным нажатием на левую кнопку мыши.
Рис.2.27 |
Рис.2.28 |
При работе с графиком можно воспользоваться функцией увеличения (Zoom) (рис.2.29) или отображения координат точки графика (Trace) (например, для нахождения координат точки пересечения двух графиков) (рис.2.30).
Рис.2.29 |
Рис.2.30 |
35
ПОСЛЕДОВАТЕЛЬНОСТЬ ПРОВЕДЕНИЯ РАБОТЫ
1.В ПК «МВТУ» создать модель ОУ по его структурной схеме (рис.1.18) и вычисленным в п.1 лабораторной работы №1 передаточным функциям динамических звеньев.
2.По модели в ПК «МВТУ» определить передаточные функции ОУ по управляющему u(t) и возмущающему f(t) воздействиям. Результаты
сравнить с полученными в п.1 лабораторной работы №1.
3.В ПК «МВТУ» по функциональной схеме САУ (рис.1.17) и результатам п.1 составить структурную схему САУ. По модели в ПК «МВТУ» определить передаточные функции замкнутой системы с единичной отрицательной обратной связью по задающему g(t) и возмущающему
f(t) воздействиям относительно выходной координаты y(t) и ошибки(t). Результаты сравнить с полученными в п.3 лабораторной работы №1.
4.
СОДЕРЖАНИЕ ОТЧЕТА
Отчет должен содержать:
исходные данные, все промежуточные аналитические выводы, схемы моделей, значения параметров и графики в формате ПК «МВТУ», в которых должны быть отражены все исследования, проведенные в работе согласно заданию;
выводы по каждому пункту задания, где предполагается проведение исследований;
общие выводы по всей работе.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Что такое передаточная функция?
2.Перечислите способы соединений динамических звеньев.
3.Какие правила преобразования структурных схем вы знаете?
Лабораторная работа №3. ПООПЕРАТОРНАЯ СТРУКТУРНАЯ СХЕМА. ВЕКТОРНО-МАТРИЧНАЯ ФОРМА ПРЕДСТАВЛЕНИЯ ОБЪЕКТА УПРАВЛЕНИЯ
Цель – представить объект управления в виде пооператорной структурной схемы, научиться составлять векторно-матричную форму.
ОБЩИЕ СВЕДЕНИЯ
36
3.1.МАТЕМАТИЧЕСКИЕ МОДЕЛИ ДИНАМИЧЕСКИХ СИСТЕМ В ВЕКТОРНО-МАТРИЧНОЙ ФОРМЕ (ВМФ)
Развитие высококачественных систем управления потребовало разработки новых методов их анализа и синтеза. Современная теория управления, основу которой заложили известные работы Л.С.Понтрягина, Р.Беллмана и Р.Калмана, базируется на описании систем в пространстве состояний.
Описание в пространстве состояний представляет собой общий взгляд на любые системы и пригодно для исследования и проектирования сложных систем с многими входами и выходами, то есть многомерных и многосвязных систем. С математической точки зрения анализ систем в пространстве состояний означает использование методов матричного исчисления и векторного анализа.
Понятие состояния является определяющим в современной теории управления. Под состоянием системы понимается минимально-необходимый набор переменных величин системы x1, x2, ... xn, способных однозначно и
единственным образом определить положение системы в любой момент времени t. Совокупность переменных величин x1, x2, ... xn образует n-мерное
пространство состояний. Вектор X с компонентами x1, x2, ... xn называется вектором состояния:
x1
x X 2 .
...
|
|
|
xn |
|
|
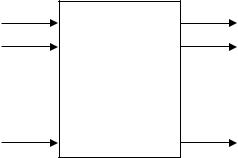
Рассмотрим систему с m входами (u1, |
u2, ... um), r выходами |
|
(y1, y2, ... yr ) и n переменными координатами (x1, |
x2, ... xn) (рис.3.1). |
|
u1 y1 u2 y2
|
x , |
x |
2 |
, ... x |
n |
|
|
1 |
|
|
|
um yr
Рис.3.1
Поведение системы во времени можно характеризовать не только выходными величинами, но и промежуточными переменными координатами в цепи системы - переменными состояния xi , число которых равно порядку
37
системы n. Таким образом, получается n-мерный вектор состояния X, множество возможных положений которого образует векторное пространство, называемое пространством состояний системы.
В общем случае линейная система, описывается системой дифференциальных уравнений в нормальной форме и может быть определена следующей векторно-матричной формой:
X |
AX BU |
|
(3.1) |
Y CX DU
где X - вектор состояния системы,
Y - вектор выходных управляемых величин,
U - вектор внешних воздействий (задающих и возмущающих), А, В, С, D - матрицы системы.
Рассмотрим одну из методик составления векторно-матричных дифференциальных уравнений для системы с двумя входами и одним выходом (рис.1.4). Согласно структурной схеме:
Y(p) U(p)Wyu(p) F(p)Wyf (p), где
W (p) |
|
b pm |
b pm 1 |
b pm 2 |
... b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
0 |
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
m |
|
|
- |
передаточная |
функция |
ОУ |
по |
|
|
|||||||||||||||||||||
|
|
a pn |
a pn 1 |
a pn 2 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
yu |
|
|
|
|
|
|
|
... a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
воздействию u(t); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
W |
|
(p) |
|
|
c pk |
c pk 1 |
c pk 2 |
... c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
yf |
|
|
0 |
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
k |
|
- |
передаточная |
функция |
ОУ |
по |
|
|
|||||||||||||||||||||
|
a pn |
a pn 1 |
a pn 2 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
... a |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
воздействию f (t). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
Тогда: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Y(p) U(p) |
b pm |
b pm 1 b |
|
pm 2 |
... b |
|
F |
(p) |
c |
0 |
pk |
c pk 1 c |
2 |
pk 2 |
... c |
k |
. |
||||||||||||||||||||||||||||||
0 |
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
m |
|
|
|
1 |
|
|
|
|
|
||||||||||||||||||||||
|
pn |
a |
|
|
|
|
pn 2 |
|
|
|
|
|
|
|
|
|
|
pn a |
|
|
pn 2 |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
a |
0 |
pn 1 a |
2 |
... a |
n |
|
|
|
a |
0 |
pn 1 a |
2 |
... a |
n |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|||||||
|
|
Преобразуем: |
|
|
|
|
|
|
|
|
|
U(p) b pm b pm 1 b pm 2 ... b |
|
|
|
|
|||||||||||||||||||||||||||||||
Y(p) a |
0 |
pn a pn 1 a |
2 |
pn 2 ... a |
n |
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
, |
|
|
0 |
|
|
|
1 |
|
|
|
2 |
|
|
|
|
m |
|
|
|
|
|||||||||
F(p) c |
0 |
pk c pk 1 |
c |
2 |
pk 2 |
... c |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Y(p)a |
0 |
pn |
U(p) b pm b pm 1 b pm 2 |
... b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
||||
F(p) c |
0 |
pk c pk 1 |
c |
2 |
pk 2 |
... c |
k |
Y(p) a pn 1 |
a |
2 |
pn 2 |
... a |
n |
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Y(p)a |
0 |
pn |
U(p) b pm b pm 1 b pm 2 |
... b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
||||
F(p) c |
0 |
pk c pk 1 |
c |
2 |
pk 2 |
... c |
k |
Y(p) a pn 1 |
a |
2 |
pn 2 |
... a |
n |
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Рассмотрим частный случай m k n 1. Тогда слагаемые в правой части уравнения можно сгруппировать следующим образом:
38
Y(p)a |
0 |
pn pm b U(p) c |
F(p) a Y(p) pm 1 bU(p) c F(p) a Y(p) |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
1 |
|
2 |
|
|
|
||||
pm 2 b U(p) c |
F(p) a Y(p) ... b U(p) c |
m |
F(p) a |
Y(p) . |
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
|
m |
|
|
|
|
|
|
|
n |
|
|
|
|
|
|||
Разделим обе части уравнения на a pn: |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
c0 |
|
|
|
a1 |
|
|
|
1 |
|
|
|
|
c1 |
|
|
|
a2 |
|
|
|
|||||||
Y(p) |
|
|
|
b0 |
U(p) |
F(p) |
|
|
Y(p) |
|
|
b1 |
U |
(p) |
|
F(p) |
Y(p) |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||||||||||||||||||||
|
|
p |
|
a0 |
|
a0 |
|
|
|
p |
|
a0 |
|
a0 |
|
||||||||||||||||||||||
|
|
|
|
|
a0 |
|
|
|
|
|
|
|
|
|
|
|
a0 |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
1 |
|
|
|
|
|
cm |
|
|
|
an |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
bm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
... |
|
|
|
n |
|
U(p) |
|
F(p) |
|
|
Y(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
p |
|
a0 |
|
a0 |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
a0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
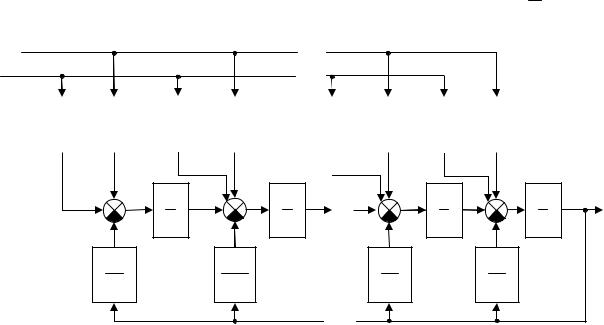
Полученному уравнению соответствует пооператорная структурная
схема (рис.3.2), содержащая n идеальных интегрирующих звеньев 1 . p
F(p)
U(p)
|
bm |
|
|
|
cm |
|
|
|
bm 1 |
|
|
|
cm 1 |
|
|
|
b1 |
|
|
|
c1 |
|
|
|
b0 |
|
|
|
c0 |
|
|
a0 |
|
|
a0 |
|
|
a0 |
|
|
a0 |
|
|
a0 |
|
|
a0 |
|
|
a0 |
|
|
a0 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
1 |
|
1 |
Y(p) |
x1 p |
x1 |
x2 p x2 |
xn 2 |
xn 1 p |
xn 1 |
xn p |
xn |
an |
|
an 1 |
a2 |
|
a1 |
|
|
a0 |
|
a0 |
a0 |
|
a0 |
|
|
Рис.3.2
На схеме отмечены переменные состояния x1, x2, ..., xn .
Переменные состояния в общем случае определяются выражениями:

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
39 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
an |
|
|
|
|
|
|
|
|
|
bm |
|
|
|
|
|
|
|
cm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xn(t) |
|
|
u(t) f (t) |
|
||||||||||||||||||||
|
|
|
|
x1(t) |
a0 |
|
|
a0 |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
an 1 |
|
|
|
|
|
bm 1 |
|
a0 |
|
|
|
cm 1 |
|
||||||||||||
|
|
|
|
|
|
|
(t) x1 |
|
|
xn(t) |
u(t) |
|
f (t) |
||||||||||||||||||||||
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
a0 |
|
|
a0 |
|
|
a0 |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a2 |
|
|
|
|
|
|
b1 |
|
|
|
|
|
|
c1 |
|
|
||||
|
|
|
|
x |
|
|
(t) x |
|
|
|
|
x (t) |
u(t) |
f (t) |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
n-1 |
|
|
n 2 |
|
|
a0 |
|
n |
|
|
|
a0 |
|
|
|
|
|
a0 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a1 |
|
|
|
|
|
|
|
b0 |
|
|
|
|
|
c0 |
|
|
|
||||
|
|
|
|
|
|
(t) xn 1 |
|
|
|
|
xn |
|
|
|
|
u |
|
|
|
f (t) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
xn |
a |
|
|
(t) a |
|
(t) a |
0 |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
||||||
|
К данной системе уравнений добавим уравнение выходного сигнала |
||||||||||||||||||||||||||||||||||
y(t): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(t) xn(t). |
|
|
|
|
|
|
|
|
|
||||||||||||
|
Полученные уравнения можно переписать в канонической векторно- |
||||||||||||||||||||||||||||||||||
матричной форме (3.1): |
|
|
|
|
|
X |
|
AX BV , |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
Y CX DV |
|
|
|
|
|
|
|
|
|
|||||||||||||
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
- вектор производных переменных состояния системы; |
|||||||||||||||||||||||||||||||||
X |
|
|
|
||||||||||||||||||||||||||||||||
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xn |
n 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
x2 |
|
- вектор переменных состояния системы; |
|
|||||||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||||
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xn n 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Y y - вектор выходных величин системы; |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
V |
u |
- вектор входных внешних воздействий системы; |
|||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
... |
0 |
|
||||
|
|
|
|
|
1 |
0 |
... |
0 |
|
A |
|
|
|
|
... ... ... ... |
||||
|
|
0 |
... |
1 |
0 |
||||
|
|
|
|
|
|
an |
|
|
|
|
a |
|
|
|||
|
|
|
|||
|
0 |
|
|
|
|
|
a |
|
|
||
|
n 1 |
- матрица системы (матрица состояния); |
|||
|
|
a |
|
||
|
0 |
|
|
|
|
|
.. |
|
|
||
a1
a0 n n

bm
a0bm 1
B a0
...
b0
a0
|
|
|
|
|
40 |
|
cm |
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
||
|
|
0 |
|
|
|
cm 1 |
|
- матрица управления; |
|||
|
a0 |
|
|
||
... |
|
|
|
||
|
c |
0 |
|
|
|
|
|
|
|
|
|
|
a0 |
|
|
||
|
|
n 2 |
|
||
C 0 |
0 ... 0 1 |
- матрица наблюдения; |
D 0 |
1 n |
|
0 - матрица связи. |
||
Матрица системы A определяет устойчивость и другие показатели качества работы системы. Матрица управления B характеризует влияние на переменные состояния входного воздействия. Матрица наблюдения C устанавливает связь выходной величины системы с вектором переменных состояния. Матрица связи D показывает влияние входного сигнала на выходную величину системы.
Пример. Построить пооператорную структурную схему и получить модель в ВМФ для ОУ (рис.1.15).
Wyu |
(p) |
|
p2 14.5p 70 |
|
|
|
|
|||
|
|
|
- |
передаточная |
функция |
ОУ |
по |
|||
p3 |
|
|
||||||||
|
|
|
12.5p2 35p 100 |
|
|
|
|
|||
управляющему воздействию; |
|
|
|
|
||||||
Wyf |
(p) |
|
|
p2 12p 20 |
|
|
|
|
||
|
|
- |
передаточная |
функция |
ОУ |
по |
||||
|
|
|||||||||
|
|
|
p3 |
12.5p2 35p 100 |
|
|
|
|
||
возмущающему воздействию.
Дифференциальное уравнение ОУ в операторной форме:
Y(p) U(p)Wyu(p) F(p)Wyf (p),
Y(p) U(p) |
p2 14.5p 70 |
F(p) |
|
p2 12p 20 |
, |
|
p3 12.5p2 35p 100 |
|
p3 |
12.5p2 35p 100 |
|||
Y(p)(p3 12.5p2 35p 100) U(p)(p2 14.5p 70) F(p)(p2 12p 20), p3Y(p) U(p)(p2 14.5p 70) F(p)(p2 12p 20)
Y(p)(12.5p2 35p 100),
Y(p) |
1 |
70U(p) 20F(p) 100Y(p) |
1 |
14.5U(p) 12F(p) 35Y(p) |
|
p3 |
p2 |
||||
|
|
|
1 U(p) F(p) 12.5Y(p) . p