

8.3. Приближенная оценка качества по лачх разомкнутого контура
Методика приближенной оценки показателей качества по ЛАЧХ также основана на гипотезе эквивалентности свойств колебательной системы свойствам колебательного звена второго порядка (см. раздел 8.2).
Главными параметрами ЛАЧХ разомкнутого контура являются частота среза ωср и наименьшая сопрягающая частота ωс1.
Запишем в соответствии с формулой (8.25) выражение для ЛАЧХ разомкнутого контура
![]() (8.43)
(8.43)
ЛАЧХ контура
состоит из двух прямых с наклонами -20 и
-40 дБ/декаду, которые сопрягаются при
частоте
![]() (рис.
8.8).
(рис.
8.8).
В зависимости от соотношения параметров k и Т01 возможны три следующих случая:
1. kT01>1, при этом ωc1<ωср<k; ξ<0,5; σ>13 %; tп>6T01; M>1,1;
2. kT01=1, при этом ωc1=ωср=k; ξ=0,5; σ=13 %; tп=6T01; M=1,1;
3. kT01<1, при этом ωc1>ωср; ξ>0,5; σ<13 %; tп<6T01; M<1,1.
Частное значение kТ01=0,5 соответствует ωс1=2ωср и ξ=0,707, т. е. апериодическому переходному процессу.
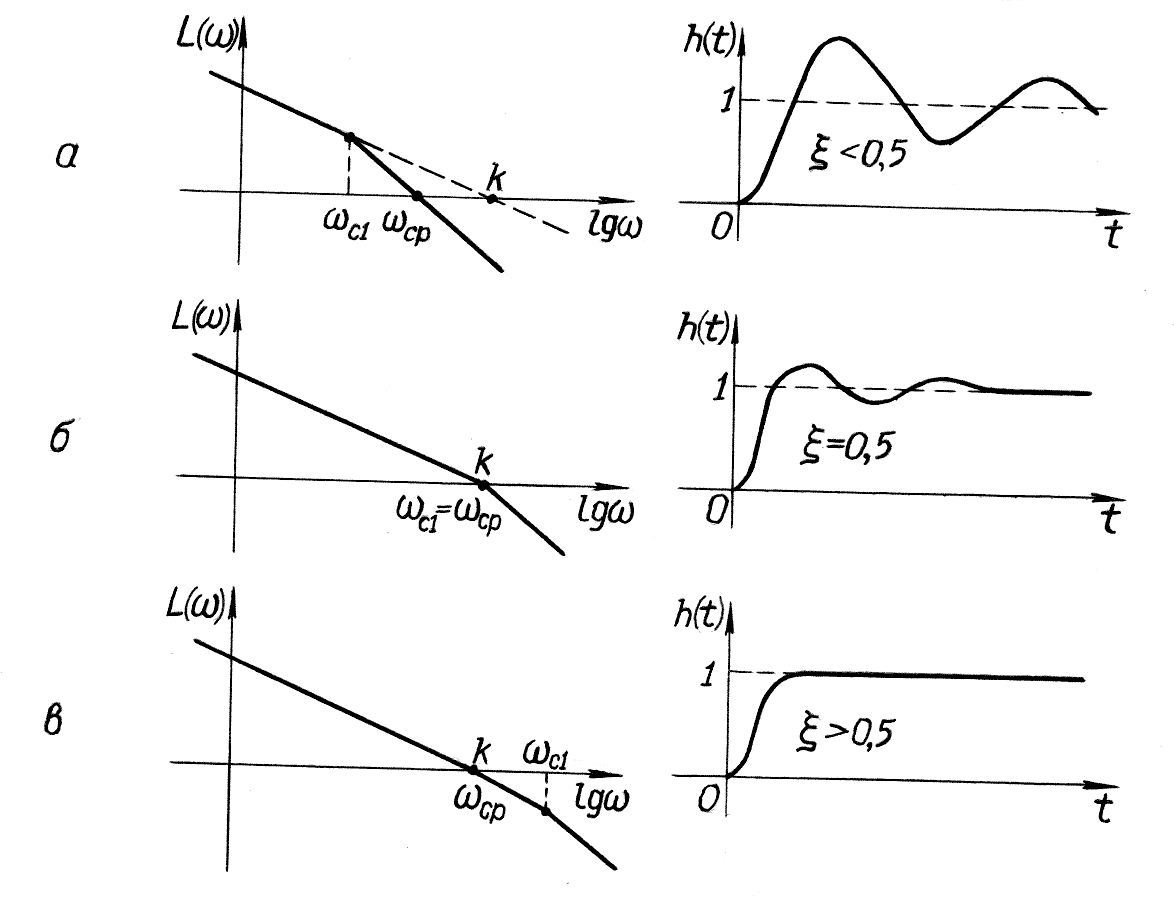
Рис. 8.8. Частотные и переходные функции простейшей колебательной системы
при различных соотношениях параметров
разомкнутого контура: kT01>1 (а),kT01=1 (б),kT01<1 (в)
Из приведенных соотношений и графиков L(ω) и h(t) следуют важные для практических расчетов выводы:
1. Система обладает удовлетворительным затуханием (ξ≥0,5), если ее ЛАЧХ имеет при частоте среза ωср наклон -20 дБ/декаду.
2. Переходный процесс в системе будет апериодическим (ξ≥0,7), если наименьшая сопрягающая частота ωс1 превышает частоту среза ωср в два раза и более; длительность переходного процесса при этом tп≈π/ωср.
3. Переходная функция системы h(t) тем ближе к экспоненте с постоянной времени Tэ=1/ωср=1/k, чем больше отношение ωс1/ωср.
Приведенные выводы справедливы, если числитель Wр.к не содержит полином от p.
8.4. Интегральные показатели качества
Каждый из рассмотренных выше прямых и косвенных показателей качества характеризует лишь одно какое-либо свойство системы, лишь один признак переходного процесса или частотной характеристики. Причем все показатели связаны с настроечными параметрами регулятора сложными зависимостями, имеющими, как правило, противоречивый характер: изменение параметра приводит к улучшению одних показателей качества и к ухудшению других. Это обстоятельство существенно затрудняет выбор параметров регулятора. Поэтому в инженерной практике широко используются интегральные показатели или оценки качества.
Интегральные оценки представляют собой определенные интегралы по времени (в пределах от 0 до ∞) от некоторой функции управляемой переменной х(t) (или сигнала ошибки ε(t)):
![]() (8.44)
(8.44)
Подынтегральная функция f0 выбирается таким образом, чтобы интеграл (8.44) лучше характеризовал качество системы и проще выражался через коэффициенты передаточной функции замкнутой системы. Чтобы интеграл был сходящимся, в функцию f0 вводят не абсолютные значения х(t) или ε(t), а их отклонения от конечных, установившихся значений.
Простейшей интегральной оценкой является линейная интегральная оценка
![]() (8.45)
(8.45)
которая равна площади, заключенной между прямой х(∞) и кривой переходного процесса х(t) (рис. 8.9,а). Интегральная оценка (8.45) учитывает как величину динамических отклонений, так и длительность их существования. Поэтому чем меньше оценка, тем лучше качество процесса управления.
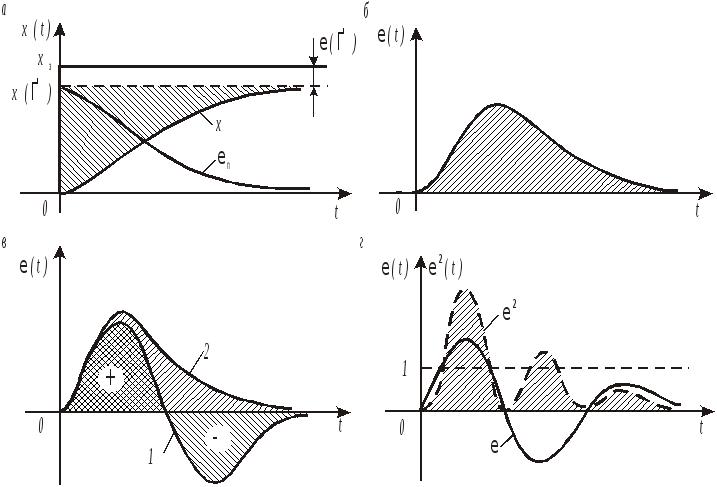
Рис. 8.9. Интегральные оценки качества
Разность под знаком (8.45) равна динамической или переходной составляющей сигнала ошибки:
![]() (8.46)
(8.46)
поэтому интегральную оценку (8.45) чаще определяют в таком виде:
![]() (8.47)
(8.47)
Интеграл (8.47) соответствует площади под кривой переходной составляющей сигнала ошибки, вызванной изменением задающего воздействия (рис. 8.9,а) или возмущающего воздействия (рис. 8.9,б). Площадь под кривой εп(t) будет тем меньше, чем быстрее заканчивается переходный процесс и чем меньше отклонения сигнала х(t) от хз. Поэтому настроечные параметры регулятора необходимо выбирать таким образом, чтобы интегральная оценка была минимальна.
Недостатком линейной интегральной оценки Qл является то, что ее можно применять лишь для заведомо неколебательных, апериодических переходных процессов. Действительно, из рис. 8.9,в ясно, что интеграл (8.47), вычисленный для знакопеременной кривой 1, будет существенно меньше интеграла, вычисленного для апериодической кривой 2 (хотя качество переходного процесса 2 явно лучше).
В связи с этим для колебательных переходных процессов применяют такие интегральные оценки, у которых знакопеременность подынтегральной функции тем или иным способом устранена. Такими оценками являются, например, модульная интегральная оценка
![]() (8.48)
(8.48)
и ее модификации
![]() (8.49)
(8.49)
Оценка (8.49) придает больший вес тем значениям сигнала ошибки, которые имеют место в конце переходного процесса.
Оценки (8.48) и (8.49) можно использовать только при исследовании систем на моделях, так как их вычисление через коэффициенты ПФ (без нахождения εп(t)) невозможно.
При анализе и синтезе систем регулирования с колебательными свойствами наиболее широко используется квадратичная интегральная оценка
![]() (8.50)
(8.50)
которая равна площади под кривой εп2(t) (рис. 8.9,г).
Квадратичная оценка (8.50) так же, как и линейная, учитывает и величину, и длительность отклонений. Однако из-за возведения сигнала εп(t) в квадрат первые (большие) отклонения приобретают в конечном значении интеграла существенно больший вес, чем последующие (малые) отклонения. Поэтому минимальные значения оценки (8.50) всегда получаются у колебательных процессов с малым затуханием.
С целью устранения этого недостатка применяют так называемую улучшенную квадратичную оценку
![]() (8.51)
(8.51)
которая, кроме самих отклонений, учитывает с весовым коэффициентом Тв2 производную отклонений. Обычно весовой коэффициент Тв выбирают равным желаемому времени нарастания tн или принимают в пределах
![]() (8.52)
(8.52)
где tп – желаемая длительность переходного процесса.
Достоинством квадратичных оценок (8.50) и (8.51) является возможность их вычисления без предварительного отыскания переходного процесса – непосредственно по коэффициентам передаточной функции замкнутой системы.
Следует отметить, что абсолютные значения любой интегральной оценки сами по себе не представляют интереса. Они служат лишь для сопоставления различных вариантов настройки одной и той же системы.
Все рассмотренные интегральные показатели используют не только для оценки качества, но и для определения оптимальных значений настроечных параметров системы. Оптимальными считают такие значения, которые соответствуют минимуму интегрального показателя
![]() (8.53)
(8.53)
Предположим, что необходимо найти оптимальные значения каких-либо двух параметров (например, ki, Ti), входящих в ПФ конкретной системы. Для этого надо показатель Q выразить как функцию параметров ki, Ti
![]() (8.54)
(8.54)
а затем взять частные производные и приравнять их к нулю
 (8.55)
(8.55)
Решая систему (8,55), можно найти искомые оптимальные значения kiопт, Tiопт. На рис. 8.10 показана зависимость интегральной оценки Q от одного параметра ki.
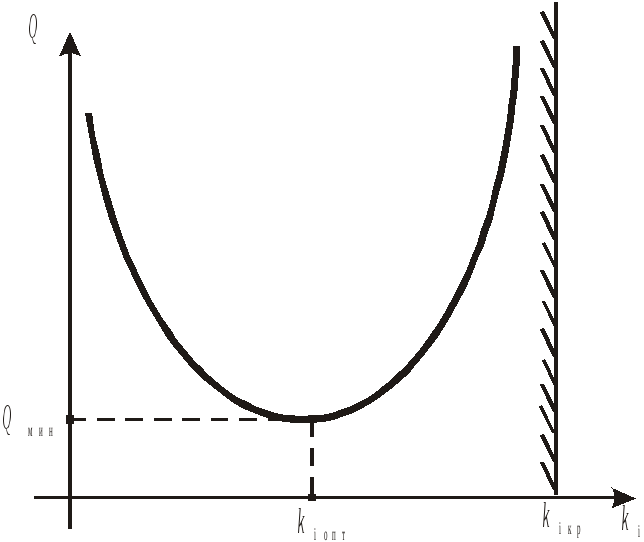
Рис 8.10. Зависимость интегральной оценки от одного параметра СУ
При сложном характере функции (8.54) задачу минимизации решают численными методами.