

8. Оценка качества управления
8.1. Понятие и основные показатели качества
Понятие качества управления. Качество СУ определяется совокупностью свойств, обеспечивающих эффективное функционирование как самого ОУ, так и управляющего устройства, т. е. всей СУ в целом. Свойства, составляющие эту совокупность и имеющие количественные измерители, называют показателями качества системы управления.
Качество СУ, как и любого технического устройства, может быть оценено такими общепринятыми показателями, как вес системы, ее габариты, стоимость, надежность, долговечность и т. п. Совокупность этих общетехнических показателей характеризует качество СУ в широком смысле.
В теории управления и в практике автоматизации термины «качество системы», «качество управления» используют, как правило, в более узком смысле: рассматривают только статические и динамические свойства системы. Эти свойства предопределяют точность поддержания управляемой величины (выходной величины объекта) на заданном уровне в установившихся и переходных режимах, т. е. обеспечивают эффективность процесса управления. Для такого, более узкого, понятия качества СУ, охватывающего только ее статические и динамические свойства, применяют термин «качество управления», а сами свойства системы, выраженные в количественной форме, называют показателями качества управления.
Точность системы в установившихся режимах как одна из важнейших характеристик качества управления была рассмотрена отдельно, в главе 6. В настоящей главе будут рассмотрены показатели качества, характеризующие точность системы в переходных режимах.
Точность системы в переходных режимах оценивают при помощи прямых и косвенных показателей. Прямые показатели определяют по графику переходного процесса, возникающего в системе при ступенчатом внешнем воздействии. Косвенные показатели качества определяют по распределению корней характеристического уравнения или по частотным характеристикам системы.
К особой категории качества относятся так называемые интегральные оценки, которые вычисляют либо непосредственно по переходной функции системы, либо по коэффициентам ПФ системы.
Точность системы в переходных режимах определяется величиной отклонений управляемой переменной х(t) от заданного значения хз(t) и длительностью существования этих отклонений. Величина и длительность отклонений зависят от характера переходного процесса в системе. Характер переходного процесса, в свою очередь, зависит как от свойств системы, так и от места приложения внешнего воздействия.
При самой общей оценке качества обращают внимание прежде всего на форму переходного процесса. Различают следующие типовые переходные процессы (рис. 8.1,а,б): колебательный (линия 1), монотонный (линия 2) и апериодический (линия 3).
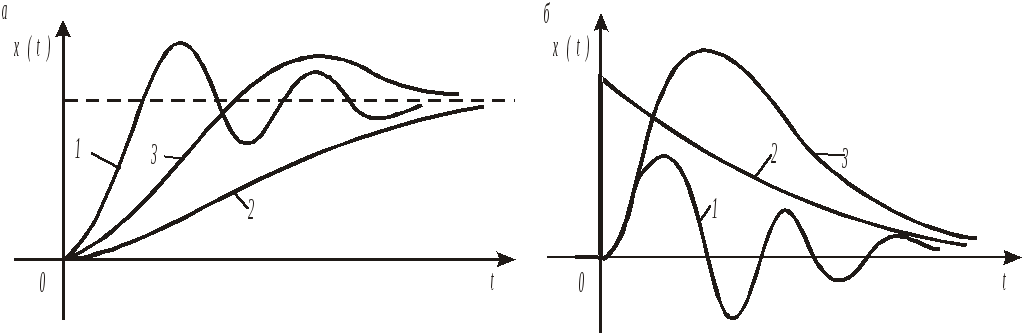
Рис. 8.1. Типовые переходные процессы по заданию (а)и возмущению (б)
Каждый из трех типовых процессов имеет свои преимущества и недостатки, и предпочтение той или иной форме процесса делают с учетом особенностей ОУ. Так, например, в электромеханических объектах со сложными кинематическими передачами (экскаваторы, подъемные установки) нежелательны резкие знакопеременные усилия, и поэтому при выборе настроек СУ такими объектами стремятся к апериодическим и монотонным процессам. В СУ технологическими процессами и аппаратами большой емкости допустимы колебательные переходные процессы, так как кратковременные отклонения управляемых величин не нарушают, как правило, нормальный режим работы аппарата и не ухудшают существенно показатели процесса.
Рассмотрим основные показатели качества управления применительно к типовой одноконтурной системе регулирования, описанной в разделе 5.3 (см. рис. 5.5,б).
Прямые показатели. На рис. 8.2 приведены графики переходных процессов, вызванных ступенчатым изменением задающего воздействия хз(t) (а) и возмущения ув, действующего на входе объекта (б). За начало отсчета для выходной величины х(t) принято значение х(-0), которое было до подачи ступенчатого воздействия.
Одним из главных прямых показателей качества является коэффициент перерегулирования σ, который равен отношению первого максимального отклонения хм управляемой переменной х(t) от ее установившегося значения х(∞) к этому установившемуся значению (см. рис. 8.2,а):
![]() (8.1)
(8.1)
Качество процесса управления считается удовлетворительным, если коэффициент перерегулирования не превышает 30-40 %.
Для переходных процессов, вызванных возмущающим воздействием yв на входе объекта (см. рис. 8.2,б), коэффициент перерегулирования можно определять как отношение второго (отрицательного) максимального отклонения А2 к первому максимальному отклонению А1:
![]() (8.2)
(8.2)
Показатель, вычисляемый по данной формуле для переходных процессов по каналу возмущения, называют также колебательностью.
Другой важной характеристикой таких процессов служит динамический коэффициент регулирования Rд, который равен отношению первого максимального отклонения хм к отклонению выходной переменной х(t) нерегулируемого объекта, вызванному тем же возмущением,
![]() (8.3)
(8.3)
Коэффициент Rд показывает, насколько эффективно компенсирующее действие регулятора на объект.
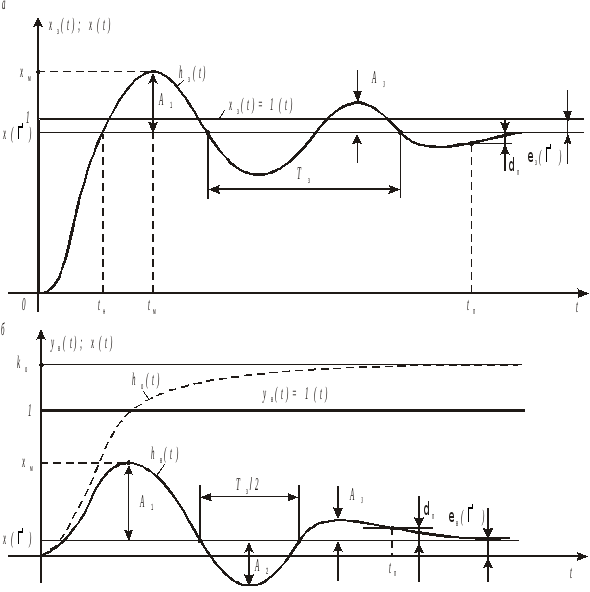


Рис. 8.2. Прямые показатели качества процесса управления:
а– по каналу задания;б– по каналу возмущения
Отметим, что и само первое максимальное отклонение хм, возникающее от возмущения на входе объекта, является показателем качества. При формировании требований к системе указывают допустимое значение максимального отклонения (непосредственно в единицах измерения управляемой величины).
Длительность
существования динамических отклонений
управляемой величины x(t)
от ее нового установившегося значения
x(∞)
принято оценивать с помощью нескольких
характерных моментов времени. Самым
важным из этой группы показателей
является длительность
переходного процесса
tп
- интервал времени от момента приложения
ступенчатого воздействия до момента,
после которого отклонения управляемой
величины х(t)
от ее нового установившегося значения
x(∞)
становятся меньше некоторого заданного
числа δп,
т. е. до момента, после которого
выполняется условие
![]() .
.
В промышленной автоматике величину δп принимают обычно равной 5 % от установившегося значения x(∞), т. е. δп=0,05 x(∞). При оценке длительности переходных процессов, вызванных единичным возмущающим воздействием ув на входе объекта (см. рис. 8.2,б), величину δп можно принимать равной 5 % от значения ПК объекта k0, т. е. δп=0,05k0, а для процессов, вызванных воздействием хв на выходе объекта, 5 % от начального отклонения х(+0), т. е. δп=0,05х(+0).
Дополнительными временными показателями качества являются (см. рис. 8.2,а): время нарастания tн, время достижения первого максимума tм и период затухающих колебаний Тз. Эти показатели вместе с tп характеризуют быстродействие системы регулирования.
Прямым показателем качества служит также степень затухания
![]() (8.4)
(8.4)
где А1
и А2
– соседние максимальные отклонения
(амплитуды) одного знака (см. рис. 8.2).
Интенсивность
затухания колебаний в системе считается
удовлетворительной, если
![]() =
0,75-0,95.
=
0,75-0,95.
Колебательность системы можно оценивать, наряду с показателями σ и ψ, числом переходов N величины х(t) через установившееся значение x(∞) на интервале tп.
Три главных показателя качества – коэффициент перерегулирования σ, первое максимальное отклонение хм и длительность tп – тесно связаны между собой. Они зависят от всех параметров системы, но наиболее сильно – от ПК разомкнутого контура. Причем с увеличением этого коэффициента максимальное отклонение по каналу возмущения всегда уменьшается, а перерегулирование и длительность переходного процесса, как правило, увеличиваются (рис. 8.3). Отыскание наилучшего компромисса между этими двумя противоречивыми тенденциями является одной из основных задач синтеза систем управления.
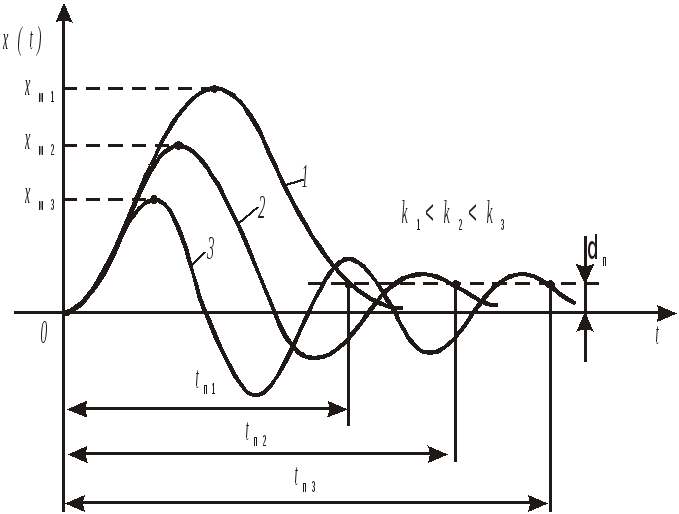
Рис. 8.3. Влияние ПК разомкнутого контура на показатели переходного процесса
Рассмотренные прямые показатели качества удобно использовать в тех случаях, когда график переходного процесса х(t) можно получить экспериментально – в реальной системе регулирования или путем моделирования системы на ЭВМ. Если же такой возможности нет или она связана с определенными трудностями решения или моделирования дифференциальных уравнений высокого порядка, то пользуются косвенными показателями качества, которые вычисляются без построения графика переходного процесса, по коэффициентам уравнения или по частотным характеристикам системы.
Частотные показатели. Наиболее важными и одновременно удобными косвенными показателями являются частотные показатели, которые определяются по частотным характеристикам замкнутого и разомкнутого контура СУ.
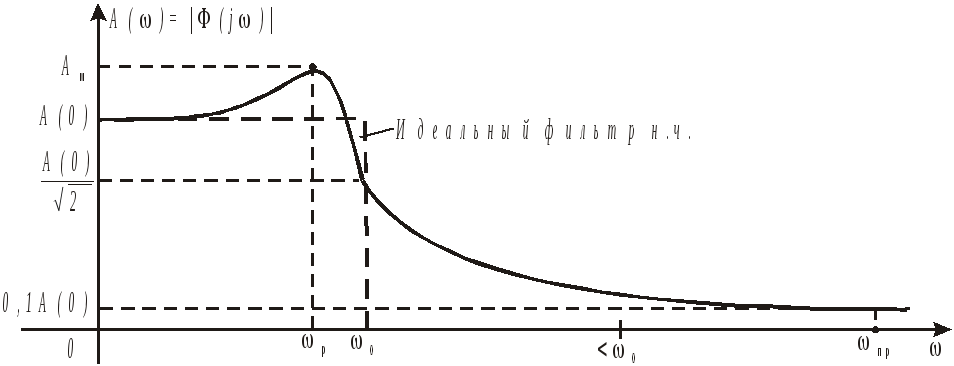
Рис. 8.4. Частотные показатели качества
По амплитудной частотной характеристике А(ω) замкнутой системы по основному каналу хз - х (рис. 8.4) оценивают частотный показатель колебательности М, равный отношению максимума Ам характеристики к ее начальному значению А(0):
![]() (8.5)
(8.5)
Чем больше это отношение, тем сильнее колебательность системы (тем больше перерегулирование σ) и, как следствие, больше длительность переходного процесса tп. Качество системы считается обычно удовлетворительным, если показатель М находится в пределах 1,1-1,5.
Косвенными частотными показателями быстродействия системы служат характерные частоты (см. рис. 8.4): резонансная частота ωр, частота незатухающих колебаний ω0≈ωр и частота пропускания ωп≈3ω0.
По АФХ W(jω) разомкнутого контура (рис. 8.5,а) определяют запас устойчивости по амплитуде
![]() (8.6)
(8.6)
и запас устойчивости по фазе
![]() (8.7)
(8.7)
которые вместе характеризуют удаленность кривой W(jω) от критической точки (-1, j0). При проектировании систем обычно задаются запасом по амплитуде ΔА≥0,5-0,6 и по фазе Δφ≥30-60°. При этом обеспечивается, как правило, и удовлетворительное качество процесса управления.
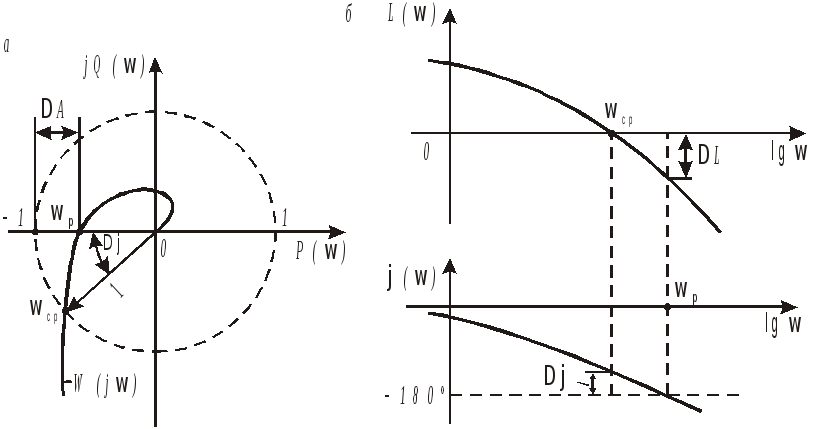
Рис. 8.5. Запасы устойчивости системы
Запасы устойчивости необходимо принимать в связи с тем, что некоторые параметры ОУ могут произвольно изменяться в процессе работы системы. Например, постоянные времени электрических машин экскаваторного привода из-за изменения температуры окружающего воздуха могут существенно отклоняться от своих номинальных (расчетных) значений. Расхождения между фактическими значениями параметров объекта и значениями, при которых выполняется анализ устойчивости системы, могут иметь место и по другим причинам. Так, при математическом описании объекта применяется определенная идеализация – отбрасываются второстепенные факторы. Погрешности возникают также при экспериментальном определении и при линеаризации характеристик объекта.
В логарифмической системе координат (рис. 8.5,б) запас устойчивости по амплитуде определяется по выражению
![]() (8.8)
(8.8)
Указанным выше значениям ΔА соответствует ΔL≥6-8 дБ.
Корневые показатели. Для косвенной оценки качества управления используют также корневые показатели, определяемые по расположению корней р1, р2, ... , рn характеристического уравнения замкнутой системы
![]() (8.9)
(8.9)
на комплексной плоскости (рис. 8.6,а).
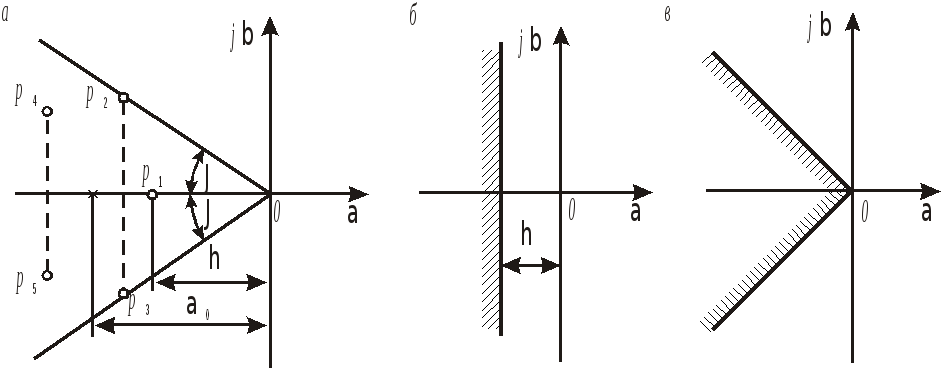
Рис. 8.6. Корневые показатели качества
Наиболее общим корневым показателем качества является среднее геометрическое значение модулей корней
![]() (8.10)
(8.10)
Среднегеометрический корень α0 определяет на действительной оси комплексной плоскости α - jβ (рис. 8.6,а) точку, являющуюся геометрическим центром всех корней характеристического уравнения. Величина α0 имеет размерность с-1 и служит обобщенной мерой быстродействия системы: чем меньше показатель α0, тем ближе «созвездие» корней к мнимой оси и тем больше длительность переходного процесса.
Основное влияние на характер переходного процесса оказывают корни, расположенные ближе к мнимой оси. Эти корни дают наиболее длительные составляющие переходного процесса и называются доминирующими.
Расстояние от мнимой оси до ближайшего к ней корня называется степенью устойчивости η. Если ближайший корень действительный (на рис. 8.6,а корень р1), то доминирующей составляющей переходного процесса будет экспонента с показателем степени pk=-η
![]() (8.11)
(8.11)
если же ближайшими к мнимой оси являются два сопряженных комплексных корня, то доминирующей будет одна колебательная составляющая, которая затухает также по экспоненциальной составляющей (8.11). В обоих случаях длительность переходного процесса (для δп=0,05Ck) определяется приближенной формулой
![]() (8.12)
(8.12)
где знак равенства относится к случаю действительного доминирующего корня, а знак неравенства – к случаю комплексных доминирующих корней.
При выборе настроечных параметров регулятора всегда стремятся скомпенсировать (исключить из уравнения) доминирующие (наименьшие корни), которым соответствуют наибольшие постоянные времени объекта, и тем самым улучшить быстродействие системы.
Колебательные
свойства СУ предопределяет та k-я
пара комплексных корней![]() ,
у которой наибольшее отношение
,
у которой наибольшее отношение
![]() (8.13)
(8.13)
или наибольший угол θ между двумя симметричными лучами (см. рис. 8.6,а). На рис. 8.6,а такой парой, предопределяющей доминирующую колебательную составляющую переходного процесса, являются комплексные корни p1 и p2.
Отношение μд мнимой части β к действительной части α доминирующей пары комплексных сопряженных корней называют степенью колебательности.
В практических расчетах чаще используют так называемый корневой показатель колебательности
![]() (8.14)
(8.14)
также определяемый через доминирующую пару комплексных корней. При выборе настроек регуляторов стремятся получить значения mд=0,2-0,5.
Специальными математическими исследованиями установлено, что в системе любого порядка наиболее быстрый апериодический переходный процесс имеет место, когда все n корней равны между собой.
Определение показателей η и μ по уравнению с известными коэффициентами является в общем случае такой же трудоемкой задачей, как и отыскание самих корней. Легче решается обратная задача – определение коэффициентов уравнения и параметров системы, при которых все корни лежат в области с заданной степенью устойчивости (рис. 8.6,б) или колебательности (рис. 8.6,в).
Корневые показатели α0, η, μд и mд важны для понимания проблемы качества и ее связи с проблемой устойчивости, но используются реже других, так как их непосредственное определение для конкретной системы высокого порядка (n>3) представляет собой сложную вычислительную задачу.