

Казарезов Проеектування пристроiв и систем пiдводных апаратiв
.pdfПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
Компресори типу "Старт", АЗНВ1 переносні (робочий газ – повітря для аквалангів), інші – пересувні (робочий газ для компресора ГК-225 – гелій, для інших – повітря). Гелієвий компресор ГК-225 має максимальний ступінь стиску – 10, тиск на вході 15 МПа, на виході – 22,5 МПа. Використовується для наповнення малолітражних і транспортних балонів.
Кисневі компресори (табл. 2.10) призначені для наповнення киснем або азотно-геліокисневою сумішшю малолітражних балонів водолазних апаратів до тиску 15...20 МПа шляхом перепуску і наступного перекачування кисня або суміші із транспортних балонів, для наповнення киснем транспортних гелієвих балонів під час виготовлення геліокисневих і азотно-геліокисневих сумішей.
Таблиця 2.10. Технічні характеристики водолазних кисневих дотискуючих
компресорів
|
250-КД |
200-КД |
250-4-КД |
ЗМ-КД |
4-КН |
П4-КН |
Р-КН |
-5 |
Характеристика |
,М4-КДКД |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подача при тиску всмок- |
|
|
|
|
|
|
|
|
тування 7 МПа, л/хв |
1,56 |
1,60 |
1,63 |
1,50 |
1,48 |
1,49 |
0,45 |
1,56 |
Робочий тиск, МПа |
27 |
22 |
24,5 |
22 |
20 |
20 |
20 |
25 |
Кількість циліндрів |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
Кількість ступенів стиску/ |
|
|
|
|
|
|
|
|
ступінь стиску |
1/2 |
1/2 |
1/2 |
1/3 |
1/2 |
1/2 |
1/2 |
1/2 |
Напруга, В |
|
|
220/380 |
|
127/220 |
|
Ручний привод |
220/380 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Потужність, Вт |
1,1 |
1,1 |
1,1 |
1,1 |
1,0 |
1,0 |
– |
3,0 |
Частота обертання, об/хв |
440 |
440 |
555 |
440 |
450 |
450 |
20 |
550 |
|
580× 500× 450× |
580× 500× 450× |
610× 570× 490× |
570× 495× 445× |
930× 450× 600× |
× |
× |
10×580× 700× |
Габаритні розміри, мм |
1300× 450 600× |
1300× 500 650× |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Маса, кг |
65 |
65 |
66 |
87 |
110 |
200 |
60 |
101 |
61

А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
2.4. Електрогенератори
Електрогенератори (ЕГН) призначені для забезпечення електроенергією загальносуднового і технологічного обладнання, а також зарядки акумуляторних батарей (АБ). Установлюються на великих населених ПА, підводних човнах різного призначення (бойових, робочих, туристичних).
Генератори для вироблення електричного струму на підводних апаратах розрізняють [5, 56]:
за принципом дії – електромеханічні, терморезистивні, напівпровідникові, ізотопні;
за типом привода – ДВЗ чи турбіна; за конструктивним виконанням – навісні з бічним відбором
потужності від головного двигуна і співвісні; за родом струму – змінного і постійного струму;
за напругою – низької (до 30 В), середньої (до 600 В) і високовольтні.
Частіше зустрічаються навісні ЕГН, які мають кращі масогабаритні показники і більш високий ККД.
Системи електропостачання обов'язково включають у свій склад підсистеми: розподілу електроенергії (з апаратурою керування), регулювання, захисту, а також генераторні лінії і шини. Структура їх індивідуальна для кожного ПА.
Системи ЕГН у залежності від роду струму поділяють на два класи: з роздільною і паралельною роботою каналів генерування. Канал генерування включає джерело електроенергії, апаратуру керування, регулювання, захисту, комунікаційну і збірні шини каналу. Використовують ЕГН змінного струму як з постійною частотою 400 Гц, так і зі змінною частотою від 320 до 1050 Гц. При цьому робоча лінійна напруга мережі становить 200 В.
Електрогенератори постійного струму орієнтовані на 27 В. У більшості схем енергопостачання використовуються імпульсні інвертори, що перетворюють змінний струм напругою 200 В на постійний напругою 27 В.
Число каналів генерування звичайно дорівнює числу головних двигунів (від 1 до 3).
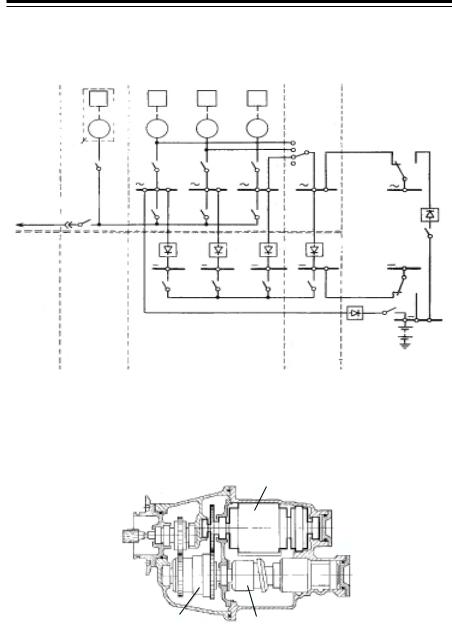
Схема триканальної системи генерування робочого підводного апарата (РПА) наведена на рис. 2.26.
Найбільш досконалим типом електромеханічних компактних навісних ЕГН є інтегральні приводи-генератори (ІПГ) з постійною
62
ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
частотою обертання (рис. 2.27) [27]. Їхні масові показники (близько 0,8 кг/кВт) і агрегатна потужність до 60 кВт у сукупності з тривалим терміном служби (до 104 год) роблять цей тип ЕГН найбільш привабливим для використання на ПА.
Пер- |
Д |
ГП1 |
ГП2 |
ГП3 |
винна |
|
|
|
|
|
Г4 |
Г1 |
Г2 |
Г3 |
АДЖ
Електроживлення від суд-
на-но- СП сія
ВУ1 ВУ2 ВУ3 ВУ4
Вторинна
Автономна |
Система |
|
|
система |
ЗП |
|
|
живлення |
|
||
|
|
|
|
Основна система |
особливо |
Резервна |
А |
|
важливих |
система |
|
|
|
||
|
споживачів |
|
|
Рис. 2.26. Схема триканальної системи генерування електричного струму РПА:
Г1–Г4 – генератори; ВУ1–ВУ4 – випрямні установки; ЗУ – зарядний пристрій; СП – статичний перетворювач; Д – двигун; ГП1–ГП3 – гідроприводи; АДЖ – автономне джерело живлення; А – акумулятор
Генератор
Диференціал Гідроприводи
Рис. 2.27. Інтегральний привод-генератор ПА
63
А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
2.5. Гідропневмоакумулятори
Гідропневмоакумулятор (ГАК) – ємність, призначена для акумулювання і повернення енергії робочої рідини. Він використовується в системах гідропривода ПА як джерело робочої рідини високого тиску і ресивера, що згладжує пульсації тиску на виході насосної станції, а також для компенсації втрат тиску і витоків [41].
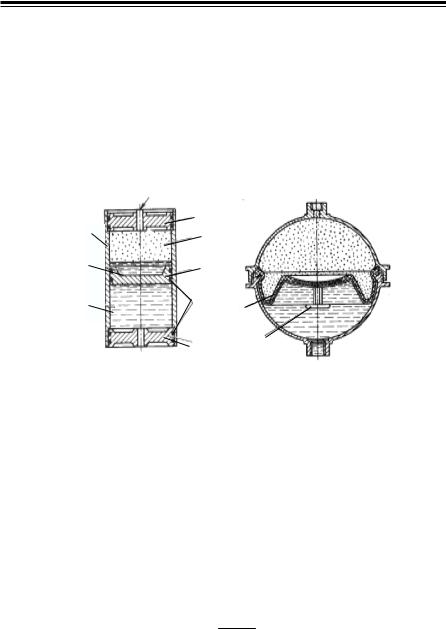
Конструктивно розрізняють ГАК за такими ознаками: за формою – сферичні і циліндричні (рис. 2.28); за способом поділу робочих порожнин – з еластичною діафрагмою із металевого сильфона або гумотканинного еластомеру і з плаваючим поршнем.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
6 |
|
|
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
3 |
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
8 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.28. Схеми гідроакумуляторів:
а – циліндричний; б – сферичний; Г, Р – газова і рідинна камери; 1, 4 – кришки; 2 – роздільний поршень; 3 – ущільнювальні кільця; 5 – рідинний затвор;
6 – корпус; 7 – гумова діафрагма; 8 – металева шайба
Корпус циліндричного ГАК, як правило, виготовляється з високоміцної легованої сталі, кришки – з алюмінієвого сплаву типу В96Т. Корпус ГАК може бути рознімним із двох половин, зі знімними фланцями або мати знімну кришку, через яку вкладається еластична мембрана. Кришки ГАК обладнуються нарізними отворами і штуцерами для включення в структуру гідравлічної системи. Товщину стінок корпусу ГАК сферичної форми визначають за формулою
tсф = k2P[σpR] ,
64
ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
де k – коефіцієнт запасу, k = 1,5...2,0; Рр – робочий тиск, визначуваний типом гідропривода, МПа (звичайно Рр = 7...25 МПа); R – ра-
діус корпусу, м; [σ ] – допустимі напруги, МПа.
Для циліндричної форми корпусу застосовується формула
tц = k[Pσp]R ,
де k = 1,8...2,5.
Гідропневмоакумулятори звичайно захищені антикорозійним покриттям: внутрішня порожнина – шаром цинку чи хрому; зовнішня поверхня – хромуванням (сталеві корпуси) та ематалюванням (корпуси з алюмінієвих сплавів) з наступним фарбуванням епоксидною чи поліуретановою емаллю.
Ємність ГАК визначають на основі гідравлічного розрахунку системи або за даними технічного завдання. Звичайно ця величина становить від 3 до 12 дм3 для одного акумулятора.
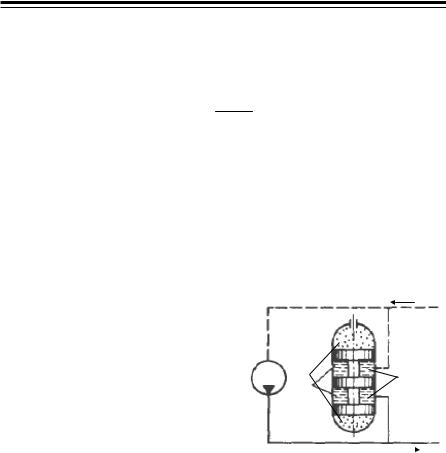
Для зменшення габаритів ГАК у Злив системі використовують двокамер-
ний акумулятор, схема включення якого зображена на рис. 2.29.
|
Г |
|
|
Р |
|
|
|
|
|
Рис. 2.29. Схема включення в сис- |
|
|
|
|
|
|
|
|
|
тему двокамерного гідроакумулятора: |
|
|
|
|
Г, Р – газова і рідинна камери |
|
Нагнітання |
|
|
|
|
|||
Робота ГАК ємністю W у процесі зарядки-розрядки описується рівнянням
PрW1,3 = const,
де 1,3 – показник політропи; Pр – робочий тиск, Па; W – об'єм газової камери, м3.
Установлено, що найбільший ефект від застосування ГАК у системі спостерігається при тиску попередньої зарядки газової камери 30...50 % від робочого тиску гідросистеми.
65
А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
2.6. Гідравлічні пристрої і машини
Гідравлічні пристрої і машини використовуються для тих же цілей, що і електромеханізми. На відміну від електричних машин носієм енергії в них служить рідина під тиском.
До переваг гідравлічних машин варто віднести можливості швидкого пуску, зупинки і реверсування (які у десятки разів перевищують характеристики електромашин), регулювання в широких межах швидкості обертання, потужності і крутного моменту, високі показники питомої потужності і масогабаритні характеристики (які
у1,5...3,0 рази перевищують аналогічні показники електродвигунів). Основний тип гідравлічних систем – системи закритого типу,
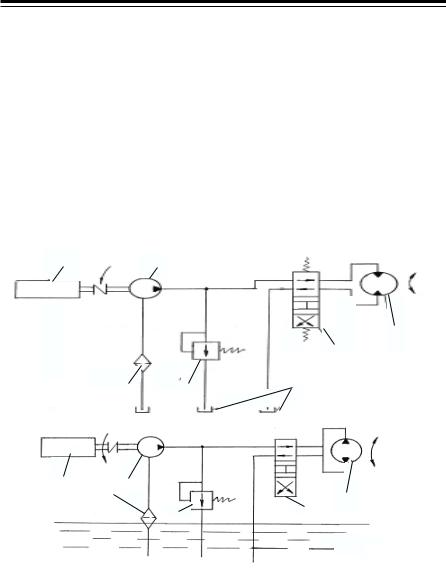
уяких робоча рідина циркулює безупинно. Використовуються також і розімкнуті гідравлічні системи, у яких відпрацьована рідина
виводиться назовні (рис. 2.30).
1 |
2 |
6
5
3 |
4 |
7 |
|
а
1 |
3 |
2 |
|
6 |
|
|
4 |
5 |
|
|
|
|
||
|
|
|
|
Забортна
вода
б
Рис. 2.30. Гідравлічна схема механізму із замкнутою (а) і розімкнутою (б) системами живлення:
1 – електромотор; 2 – насос; 3 – фільтр; 4 – запобіжний клапан; 5 – електромеханічний клапан керування потоком; 6 – гідромотор; 7 – витратний бак для масла
66
ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
Як робочу рідину закритих гідравлічних систем застосовують найчастіше масло з низькою в'язкістю, яке є не тільки носієм енергії, але і мастилом для внутрішніх елементів двигунів і насосів.
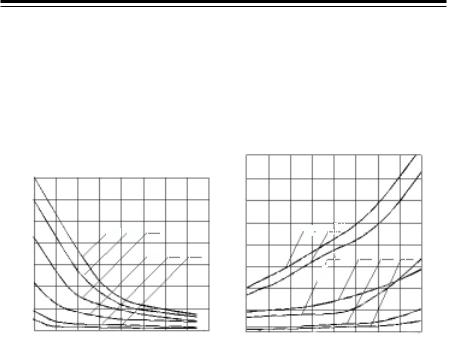
В'язкість масла зростає зі збільшенням робочої глибини і зниженням температури (рис. 2.31). Зі зростанням глибини застосовують більш рідкоплинні масла [3]. У розімкнутих гідравлічних системах робочою рідиною є морська вода, що робить непотрібними резервуари з запасом робочої рідини і спрощує герметизацію системи.
|
|
|
|
|
|
|
|
|
|
|
|
|
ν , сСт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
ν , сСт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
60 |
|
|
|
|
|
|
|
|
|
|
|
|
150 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
50 |
|
1 |
|
2 |
|
3 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
4 |
|
|
|
5 |
|
6 |
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
6 |
|
4 |
|
|
|
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
50 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 20 30 40 |
50 |
60 |
70 t, оC |
10 20 30 |
|
|
40 |
|
|
|
50 |
60 |
70 P, МПа |
||||||||||||||||||||||||
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
Рис. 2.31. Залежності в’язкості масел від температури (а) |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
і зовнішнього тиску (б): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
1 – MIL-H-6083c; |
2 – MIL-H-5606; |
3 – VV-D-001078; |
4 – AMг-10; |
||||||||||||||||||||||||||||||||||
|
5 – "Брейко-762"; 6 – гас ТЧ, вода (1 сСт = 10–6 м2/с) |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
Обмежене використання розімкнутих систем викликано значними складностями у забезпеченні корозійної стійкості і змащення основних елементів (механізмів) та боротьбі з абразивним зносом. Дослідні зразки насосів і гідромоторів, що працюють за розімкнутою схемою, апробовані на глибоководних населених ПА "Deep Qwest", "Trieste", "Paisis", "ТИНРО 2", "Аргус", "Осмотр".
Для використання на підводних апаратах найбільш придатними за тактико-технічними даними є серійні механізми і пристрої з номенклатури авіаційних підприємств, які відрізняються кращими серед інших масогабаритними характеристиками. Гарантований ресурс їхньої роботи 2000...8000 год, що в більшості випадків може вважатися задовільним з погляду експлуатації. Технічні характеристики деяких гідромоторів і насосів наведені в табл. 2.11.
67
68 |
Таблиця 2.11. Характеристики аксіально-поршневих насосів і |
гідромоторів |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Продуктивність, л/хв |
|
обертівЧисло, об/хв |
|
/об |
|
тискРобочий, МПа |
розміриГабаритні, мм |
||
|
|
|
Потужність, кВт |
|
|
3 |
кг,Маса |
|||||||
|
|
Марка |
|
|
обРобочий'єм, см |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Насос НП-26М |
|
– |
16... |
18 |
2500 |
...4000 |
|
6,0 |
7,6 |
21,0 |
150× 200× 22 |
|
|
|
Насос НП-30-1 |
|
– |
28... |
35 |
2500... |
3000 |
|
8,0 |
9,6 |
21,0 |
...28,0 |
160× 170× 260 |
|
|
Насос Н-419, Н-435 |
|
– |
50... |
60 |
2500... |
3000 |
|
20,0 |
9,0 |
8,0... |
15,0 |
160× 160× 260 |
|
|
Насос НС-46-2 |
|
– |
17... |
20 |
5000... |
7000 |
|
3,0 |
7,5 |
21,0... |
22,5 |
130× 140× 160 |
|
|
Насос НП-34 |
|
– |
35... |
38 |
2000... |
3000 |
|
11,0 |
9,6 |
21,0... |
21,5 |
245× 217× 165 |
|
|
Насос НП-89-ДПС |
|
– |
50... |
55 |
4000 |
|
12,0 |
11,5 |
21,0... |
22,0 |
– |
|
|
|
Гідромотор ГМ-40М |
2,0 |
...2,4 |
– |
|
550... |
650 |
|
10,0 |
4,0 |
21,0... |
21,5 |
90× 110× 200 |
|
|
Гідромотор ГМ-44М |
0,8... |
1,2 |
– |
|
800... |
2500 |
|
2,0 |
2,5 |
20,0... |
21,5 |
80× 90× 150 |
|
|
Гідромотор ГМ-35 |
5,5... |
10,0 |
– |
|
1500... |
2500 |
|
37,0 |
7,9 |
13,5... |
15,0 |
112× 162× 220 |
|
|
Гідромотор ГМ 08/1 |
2,5... |
3,0 |
– |
|
1800... |
3300 |
|
11,5 |
3,2 |
10,0... |
12,0 |
92× 92× 220 |
|
|
Гідромотор ГМ-21 |
1,8... |
2,2 |
– |
|
2500... |
4000 |
|
8,7 |
2,5 |
6,0 |
– |
|
|
|
Гідромотор ГМ-26 |
1,3... |
1,5 |
– |
|
2500... |
4000 |
|
4,7 |
2,0 |
6,0 |
– |
|
|
|
Гідромотор ГМ-36 |
2,5... |
3,0 |
– |
|
2700... |
3000 |
|
11,0 |
3,8 |
9,0 |
– |
|
|
|
Гідромотор ДIА-IПС |
3,5... |
5,5 |
– |
|
3000... |
4600 |
|
13,0 |
6,5 |
20,0... |
22,5 |
100× 100× 160 |
|
|
Гідромотор Г373 |
3,0... |
6,5 |
– |
|
3000... |
4600 |
|
19,0 |
3,6 |
15,0 |
110× 125× 160 |
|
Пишнєв .М.С ,Галь .Ф.А ,Казарєзов .Я.А


ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
Конструкція гідравлічних механізмів і пристроїв докладно описана в роботах [24, 28, 56]. Перелічимо лише основні їхні типи із зазначенням функціонального призначення і основних технічних характеристик.
Лінійні силові приводи (гідроциліндри) призначені для передачі зворотно-поступальних зусиль різних механізмів. Вони найчастіше бувають поршневого типу з регулюванням напрямку і швидкості переміщення та розрізняються створюваним зусиллям (від трьох до кількох сотень кілоньютонів), довжиною ходу штока (від декількох міліметрів до метра і більше) і робочим тиском Pр (використовується стандартний ряд 6,0; 9,0; 16,0; 21,0 МПа). Зусилля F, що розвивається гідроциліндром, визначається за виразом
F = S kгц Pp MH,
де S – площа поршня, м2; kгц – ККД гідроциліндра; kгц = 0,92. Іноді замість гідроциліндрів використовують пристрої сильфонного чи діафрагмового типів, які забезпечують трохи більший ККД.
Для захисту від корозії зовнішню і внутрішню поверхні циліндрів хромують, а всередині робочої порожнини закріплюють цинковий анод.
Силові приводи поворотної дії забезпечують поворот механізмів
іпристроїв на обмежений кут (від π  2 до 2π рад) при значному моменті, що сягає 200...300 кН м. Розрізняють два типи пристроїв – лопатеві і плунжерні. Обидва відносяться до механізмів об'ємної дії. Найчастіше для підводних робіт використовують поворотний гідроциліндр із рейковою передачею, що відрізняється малим витоком
2 до 2π рад) при значному моменті, що сягає 200...300 кН м. Розрізняють два типи пристроїв – лопатеві і плунжерні. Обидва відносяться до механізмів об'ємної дії. Найчастіше для підводних робіт використовують поворотний гідроциліндр із рейковою передачею, що відрізняється малим витоком
івисокими навантажувальними характеристиками. Робочий тиск аналогічний зазначеному для гідроциліндрів.
Гідравлічні двигуни призначені для перетворення енергії потоку робочої рідини в обертальний рух і навпаки, тобто є машинами оборотної дії. Гідравлічні двигуни являють собою механізми об'ємного типу, їхнє теоретичне число обертів визначається витратою рідини
Q, м3/хв:
nоб = qQqо об/хв,
де q – робочий об'єм машини за один оберт, м3; qo – об'ємний ККД; qo = 0,90...0,95.
69
А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
Обертальний момент Mоб не залежить від типу двигуна і визначається тільки тиском і витратою рідини:
Mоб = P2pπq Н м,
де Рр – робочий тиск, МПа.
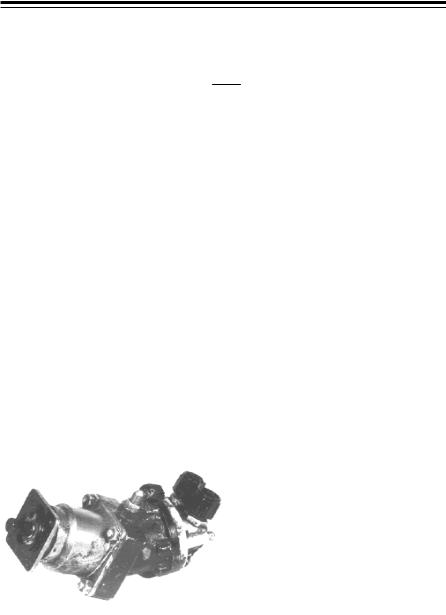
За конструктивним виконанням розрізняють машини плунжерні (радіально-поршневі й аксіально-поршневі) і шестеренні з зовнішнім або внутрішнім зачепленням (шестірня в шестірні), планетарного і серпоподібного типів. Докладно конструкція гідронасосів і моторів розглянута в пп. 2.2. Питома потужність машин перерахованих типів знаходиться в діапазоні 0,8...1,1 кВт/кг, робочий тиск – 6...21 МПа. Шестеренний тип двигуна більш невибагливий і дешевий, однак має більші витоки робочої рідини і відносно низький ККД. Зовнішній вигляд аксіально-поршневого гідромотора ГМ-40 наведений на рис. 2.32 (принципову схему див. рис. 2.13), шестеренних насосів – на рис. 2.33.
Характеристики деяких аксіально-поршневих насосів і гідромоторів, які можуть бути використані для насосних станцій і приводів ПА [42], подані в табл. 2.11.
Керовані гідравлічні клапани служать для дискретного керування потоком рідини, яка подається до виконавчого пристрою і відводиться від нього; запобігання надлишковому тиску і регулювання зусилля момента, що розвивається механізмом. Відносяться до пристроїв з електромеханічним (рід-
ше з ручним) приводом. Клапани керування поділя-
ються на дво-, три- і чотириходові за числом пар отворів, які служать для впуску і відводу рідини під тиском (рис. 2.34), а за виконанням – на двочи трипозиційні.
Рис. 2.32. Аксіально-поршневий гідромотор ГМ-40
70