

Казарезов Проеектування пристроiв и систем пiдводных апаратiв
.pdfПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
Малий зовнішній діаметр ВОЛЗ зменшує її гідродинамічний опір. Такі властивості ВОЛЗ знижують енерговитрати на буксирування ненаселеного ПА в умовах великих глибин, а також підводних течій зі швидкостями до 2 вуз.
Ненаселений ПА "Dual Gydra-2500" як основну і кабельну лінію має ВОЛЗ довжиною 2750 м і міцністю на розрив порядку 12,7 тс. Кабель здатний витримати до 100 циклів перемотування. Обплетення кожного світловоду, а також силові шнури й обплетення кабелю виконані з кевларових волокон. По кабелю передається трифазний струм напругою 2000 В. Потужність електроживлення для спеціального устаткування (гідролокатор бічного огляду, система наведення ненаселеного ПА на об'єкт, телевізійна камера, маніпуляторний пристрій і фотокамера) становить 50 кВт. Основний кабель доповнений плавучим з'єднанням довжиною 137 м і діаметром 38 мм.
3.9. Засоби зовнішньої комутації
Для стикування інформаційних каналів, датчиків та іншого забортного устаткування між собою і системою керування ПА служать засоби зовнішньої комунікації. Вони виконуються в трьох принципово різних виконаннях – у вигляді гермовводів (ГВ), герморознімань (ГР) і маслозаповненими. ГВ і ГР є перешкодою для проникнення води в міцний корпус і герметизують кінець кабелю. Виконуються ГВ і ГР найчастіше в одному з двох варіантів: перший – з герметизацією зони контакту від морської води міцними стінками рознімання і гумових ущільнень усередині його, другий – заливанням контактних пар пластмасою і зовнішнім ущільненням у вигляді гумової муфти. Характерним прикладом зовнішніх комутуючих пристроїв першого типу є гермовводи і герморознімання серії РЭГ, розраховані на робочу глибину до 6000 м для кабелів типу НРШМ і КВД. Основні ущільнення і приєднувальні вузли рознімань уніфіковані. Зовнішній вигляд рознімання РЭГ-7-25-2 наведений на рис. 3.19 [46, 56], а технічні характеристики в – табл. 3.15.
Герметизація проводів у розніманнях другого типу здійснюється епоксидним компаундом з наповнювачем із пилоподібного кварцу. Зовнішня частина закладення кабелю вулканізується гумою в спеціальній прес-формі.
151

А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
До недоліків рознімань другого типу варто віднести складність конструкції, необхідність ретельної підготовки спряжуваних частин після виготовлення і велику кількість ущільнювальних кілець, що знижує надійність з'єднання. Певні труднощі викликає також заливання компаундом кінців кабелю з великим числом важкодоступних порожнин.
|
2 |
1 |
2 |
4 |
5 |
6 |
7 |
8 |
|
3 |
|
|
|
||||
15 |
16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 13 |
|
|
|
10 |
9 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
14 |
|
|
12 |
|
|
|
|
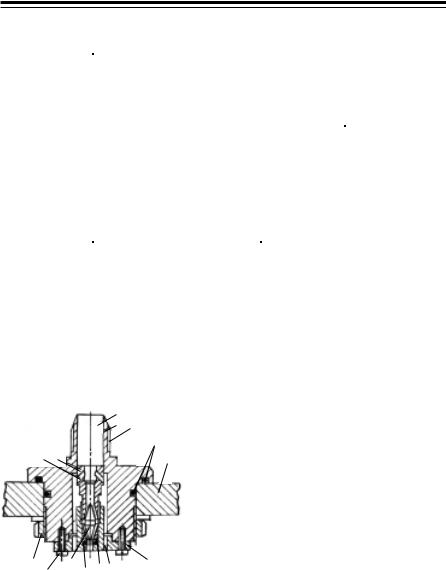
Рис. 3.19. Герморознімання РЭГ-7-25-2, використовуване |
|||||||
|
|
|
|
|
|
на ПА “Звук”: |
|
|
|
|
1 – міцний корпус; 2 – гумові кільця; 3 – гнізда; 4 – стягуюча накидна |
||||||||
|
гайка; 5 – сталевий корпус; 6 – контактні штирі; 7 – розрізний корпус; 8 – |
||||||||
|
герметизувальний вузол; 9 – кабель; 10 – монтажне кільце; 11 – епоксид- |
||||||||
|
на герметизувальна заливка; 12 – пробка з епоксидного компаунда; 13 – |
||||||||
|
штатна вставка; 14 – сталевий корпус; 15 – провід БПВЛ; 16 – гайка |
||||||||
|
Пластмасові гермовводи (рис. 3.20) позбавлені деяких зі згада- |
||||||||
|
|
|
|
|
|
|
них недоліків: вони простіші, тех- |
||
|
2 |
4 |
5 |
67 |
6 |
7 |
нологічніші у виготовленні, ма- |
||
1 |
|
ють меншу масу, не кородують і |
|||||||
|
3 |
|
|
89 |
|||||
|
|
|
|
|
забезпечують надійне електричне |
||||
34 |
|
|
|
|
|
|
з'єднання, що мало залежить від |
||
|
|
|
|
|
|
зносу спряжуваних поверхонь. |
|||
|
|
|
|
|
|
|
|||
|
|
|
|
90 |
|
|
Складності виготовлення спеціаль- |
||
|
|
|
|
|
|
них пресформ швидко окупаються |
|||
Рис. 3.20. Пластмасовий гермоввід: |
при серійному виробництві. Типо- |
||||||||
1 – розетка; 2 – вилка; 3,9 – гумові кільця; |
розмірний ряд таких герморозні- |
||||||||
4 – гумова |
втулка; 5 – розетка; 6 – гніз- |
мань, розрахованих для роботи на |
|||||||
до; 7 – кабель; 8 – накидна гайка; |
глибинах до 6000 м, наведений у |
||||||||
|
|
|
|
|
|
|
табл. 3.16. |
|
|
152 |
|
|
|
|
|
|
|
|
|
Таблиця 3.15. Характеристики глибоководних рознімань серії РЭГ
Тип |
|
Кількість |
Допустимий |
Допустима |
|
Габаритні |
розміри, мм |
|
|
Марка |
струм на кон- |
|
|
||||||
контактних |
напруга, |
|
|
||||||
рознімання |
тактну пару, |
|
Маса, кг |
|
|||||
|
пар |
В |
|
|
|||||
|
|
А |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
РЭГ-4-5-2 |
4 |
5 |
500 |
|
36× |
40/0,095 |
|
|
Слабко- |
РЭГ-7-5-2 |
7 |
5 |
500 |
|
36× |
40/0,145 |
|
|
струмові |
РЭГ-19-5-2 |
19 |
5 |
500 |
|
36× |
45/0,255 |
|
|
|
РЭГ-32-5-2 |
32 |
5 |
500 |
|
40× |
48/0,35 |
|
|
|
|
|
|
|
|
|
|
|
|
|
РЭГ-1-25-2 |
1 |
25 |
500 |
|
36× |
45/0,13 |
|
|
Середньо- |
РЭГ-4-25-2 |
4 |
25 |
500 |
|
40× |
48/0,175 |
|
|
струмові |
РЭГ-7-25-2 |
7 |
25 |
500 |
|
44× |
50/0,21 |
|
|
|
РЭГ-15-25-2 |
15 |
25 |
500 |
|
46× |
59/0,37 |
|
|
|
|
|
|
|
|
|
|
|
|
Сильно- |
РЭГ-1-200 |
1 |
200 |
500 |
|
|
|
– |
|
струмові |
РЭГ-1-400 |
1 |
400 |
500 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
Високо- |
РЭГ-1-50-2-5 |
1 |
50 |
5000 |
|
|
|
– |
|
вольтні |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
153
АПАРАТІВ ПІДВОДНИХ СИСТЕМ І ПРИСТРОЇВ ПРОЕКТУВАННЯ

А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
Таблиця 3.16. Характеристика глибоководних рознімань із пластмаси
серії РЭПА (допустима напруга 500 В)
|
|
Кількість |
Допусти- |
|
Габарити, мм |
|
Тип |
|
мий струм |
|
|
||
Марка |
контакт- |
|
|
|||
рознімання |
на контакт- |
|
Маса, кг |
|
||
|
|
них пар |
ну пару, А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Слабкостру- |
РЭПА-4-5-18 |
4 |
5 |
|
30× 84/0,056 |
|
мові |
РЭПА-8-5-18 |
8 |
5 |
|
30× 84/0,066 |
|
|
РЭПА-12-5-24 |
12 |
5 |
|
42× 115/0,125 |
|
|
РЭПА-21-5-36 |
21 |
5 |
|
64× 120/0,196 |
|
|
РЭПА-31-5-36 |
31 |
5 |
|
64× 120/0,210 |
|
|
|
|
|
|
|
|
Середньо- |
РЭПА-4-25-24 |
4 |
25 |
|
42× 115/0,130 |
|
струмові |
РЭПА-7-25-24 |
7 |
25 |
|
42× 115/0,135 |
|
Сильностру- |
РЭПА-1-200-24 |
1 |
200 |
|
42× 115/0,135 |
|
мові |
РЭПА-3-100-36 |
3 |
100 |
|
64× 120/0,186 |
|
|
РЭПА1-400-36 |
1 |
400 |
|
64× 120/0,196 |
|
Певний інтерес становлять конструкції вузлів кріплення кабельтроса з внутрішнім і зовнішнім вантажонесучим обплетенням, які дозволяють передавати зусилля безпосередньо на корпус підвіще-
ного апарата. Конструкція гермовводу для кабель-троса з внут- |
||||
|
1 |
|
|
рішнім вантажонесучим тросом пода- |
|
|
|
на на рис. 3.21. |
|
|
2 |
3 |
|
|
|
|
|
||
|
13 |
|
4 |
|
7 |
|
5 |
Рис. 3.21. Вантажонесучий гермоввід для |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
прив′язного легкого ПА: |
|
|
|
|
|
|
1 – отвір; 2 – сталевий корпус; 3 – рифлення |
|
|
|
|
|
|
для заливання гумового герметизуючого вуз- |
|
|
|
|
|
|
ла; 4 – ущільнювальні кільця; 5 – міцна сфера |
|
|
|
|
|
|
апарата; 6 – сталевий корпус тросового затис- |
|
|
|
|
|
|
кача; 7 – отвір; 8 – втулка; 9 – тефлонова шай- |
12 |
10 |
|
8 |
7 |
6 |
ба; 10 – подвійний конус; 11 – гвинт у корпусі |
9 |
|
вводу; 12 – гайка; 13 – натяжний гвинт |
||||
11 |
|
|
||||
|
|
|
|
|
Для зменшення числа вводів кабелів у міцні корпуси використовують спеціальні пристрої, які називаються комутаційними
154

ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
коробками і являють собою невеликі ємності з герморозніманнями, з'єднаними між собою у певній послідовності.
Одна сторона гермовводів заливається спеціальним компаундом, а до іншої приєднуються кабелі периферійних пристроїв.
На рис. 3.22 подано схемне зображення фрагмента системи зовнішньої комутації ненаселеного ПА і комутаційної коробки.
|
|
1 |
|
Д1 |
Д2 |
Д3 |
2 |
Д4 |
4× 0,5 |
4× 0,5 4× 0,5 4× 0,5 |
НСІ |
|
6
3× 6
|
|
КК |
4× 0,5 |
|
|
|
|
|
|
19× |
0,5 4 |
3 |
|
|
|
|
|
|
|
МК |
|
5 |
|
|
|
|
|
|
|
3× 6 |
|
|
9 |
|
|
7 |
8 |
||
|
|
а |
б |
|
|
|
|
||
Рис. 3.22. Схемне зображення фрагмента системи зовнішньої комутації НПА (а) і комутаційної коробки (б):
1 – датчики периферійних пристроїв; 2 – насосна станція; 3 – кабельна коробка; 4 – міцний корпус системи керування; 5 – акумуляторна батарея; 6 – корпус кабельної коробки; 7– гермовводи; 8 – кабелі з розніманням; 9 – герметизувальна заливка
У деяких випадках зовнішні комутаційні і кабельні системи виконують маслозаповненими, як, наприклад, на ненаселеному ПА "Манта 1,5", "Скат-гео", "Акватор", "Эрик-II" та ін. Це пояснюється порівняною простотою конструкції, доступністю використовуваних матеріалів і устаткування [1, 48].
Досвід створення і використання маслозаповнених систем дозволяє сформулювати основні принципи їхньої побудови [48, 56]:
елементи електроустаткування ПА, які розташовуються в розвантажених боксах з однаковим надлишковим тиском і типом ді-
155

А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
електрика та не чинять під час роботи взаємних перешкод, поєднуються між собою кабелями в пружних маслозаповнених шлангах з використанням прохідних для мастила електричних рознімань (якщо виникають перешкоди, блоки роз'єднують, екранують і з'єднують через рознімання, що витримують перепад тиску 0,1...0,3 МПа);
кожен ізольований блок заглибного електроустаткування забезпечується окремою компенсаційною системою й електричним колектором для маслозаповненої комутації, тиск усередині боксів з апаратурою має бути вище забортного на 0,1...0,2 МПа. За своїми електричними характеристиками маслозаповнені кабелі більш стабільні і мають меншу масу, ніж кабелі з подовжньою герметизацією такого ж діаметра. Для ізоляції маслозаповнених кабельних ліній використовується тефлон, поліуретан, неопрен, фторопласт, полівініл, які добре працюють у будь-якому масляному середовищі. Діелектричні властивості мінеральних масел типу Е-750 та їм подібних зберігаються при потраплянні в них до 9 % морської води. Рекомендації з вибору діелектричних рідин наведені в роботах [21, 48, 56]. Прикладом удалого конструкторського рішення масляного комутатора є маслозаповнені гермовводи ненаселеного ПА "Скат-гео" (рис. 3.23).
9 10 |
1 |
2 |
|
5 |
|
3 |
Рис. 3.23. Маслозаповнений гермов- |
|
|
4 |
від ПА ”Скат-гео”: |
|
|
|
1 – кришка; 2 – гумове кільце; 3 – гайка; |
|
|
5 |
4 – штуцер; 5 – поліетиленоватрубка; 6 – ста- |
|
|
6 |
кан гермовводу; 7 – гумове кільце; 8 – міц- |
|
|
7 |
ний корпус ПА; 9 – штатне рознімання |
|
|
типу РСТС; 10 – контакти штатного роз- |
|
|
|
8 |
|
|
|
німання |
|
|
|
|
Великий інтерес з погляду можливості стикування ненаселеного ПА з зовнішніми енергоблоками, інструментальними модулями і різним робочим устаткуванням становлять електричні рознімання, які дозволяють виконувати комутаційні операції в підводному положенні. З'єднання контактів у такому розніманні здійснюється в спеціальній камері, заповненій діелектричною рідиною з самоущільнюваними щілинами, крізь які проходять контактні штирі [46, 56]. Корпус рознімання виконують з металу чи пластмаси. Випробування рознімань показали їхню повну безпеку при напрузі 600 В і струмі
156
ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
до 20 А, здатність надійно працювати і зберігати високий опір ізоляції в присутності завислого піску і мулу на глибинах до 1500 м.
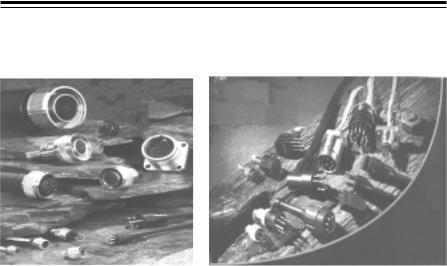
Зовнішній вигляд таких рознімань показано на рис. 3.24 [59].
а |
б |
Рис. 3.24. Електричні рознімання, що дозволяють виконувати комутаційні операції в підводному положенні
Загальною тенденцією в проектуванні комутаційних мереж ПА є зменшення кількості зовнішніх рознімань на міцних корпусах за рахунок агрегатування різнопланових кабелів та перехід на оптоволоконні кабелі. Доцільно відмітити тенденцію до мініатюризації рознімань за рахунок впровадження матеріалів з високими діелектричними властивостями і підвищення точності з'єднань.

А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
СПИСОК ЛІТЕРАТУРА
1.Автоматические подводные аппараты /М.Д. Агеев, Б.А. Касаткин, Л.В. Киселев и др. – Л.: Судостроение, 1981. – 224 с.
2.Автономный ОПА "Nautile" // Зарубежная военно-морская техника. – 1991. – № 21/22. – C. 25–31.
3.Александров В.Г., Базанов Б.И. Справочник по авиационным материалам и технологии их применения. – М.: Транспорт, 1979. – 263 с.
4.Берто Г.О. Океанографические буи. – Л.: Судостроение, 1979.
–214 с.
5.Боровиков П.А., Самарский В.Н. Подводная техника морских нефтепромыслов. – Л.: Судостроение, 1980. – 176 с.
6.Бугаенко Б.А., Галь А.Ф. Способы подъема затонувших объектов с использованием подъемных модулей из твердых пустотелых наполнителей // Судостроение.– 1994. – № 1. – С. 11–14.
7.Будов В.М. Судовые насосы: Справочник. – Л.: Судострое-
ние, 1988. – 432 с.
8.Васильев В.Ю., Крутиков А.В., Засорин В.В. Новое направле-
ние в использовании подводно-технических средств // Судострое-
ние за рубежом. – 1990. – № 3. – С. 62–73.
9.Глубоководные аппараты // Судостроение за рубежом.– 1971.
–№ 1 (49). – С. 136–139.
10.Гольдин Э.Р., Козлов В.П., Челышев Ф.П. Подводно-техниче-
ские, судоподъемные и аварийно-спасательные работы: Справоч-
ник. – М.: Транспорт, 1990. – 336 с.
11.Диомидов М.Н., Дмитриев А.Н. Подводные аппараты. – Л.:
Судостроение, 1966. –363 с.
12.Диомидов М.Н., Дмитриев А.Н. Покорение глубин. – Л.: Су-
достроение, 1974. – 324 с.
13.Дмитриев А.Н. Проектирование подводных аппаратов. – Л.: Судостроение, 1978. – 234 с.
14.Дмитриев А.Н., Диомидов М.Н. Разведчики океанских глубин. – Л.: Судостроение, 1968. – 216 с.
15.Дмитриев А.Н., Зафман М.Л., Неретин В.Н. Подводные раз-
ведчики: Рыбопромысловый подводный флот. – Л.: Судостроение, 1984. – 168 с.
16.Захаров Ю.В., Симоненко Н.А. Требования зарубежных клас-
158

ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
сификационных обществ к системам жизнеобеспечения водолазных комплексов // Судостроение за рубежом. – 1987. – № 7 (247). – С. 13–22.
17.Илларионов Г.Ю. Необитаемые подводные аппараты и их системы. – Владивосток: Изд-во Дальневост. ун-та, 1990. – 56 с.
18.Епифанов Б.С. Судовые системы: Учебник. – 2-е изд. – Л.: Судостроение, 1980. – 176 с.
19.Куликов А.Т. Материалы и арматура для судовых трубопроводов: Справочное пособие. – Л.: Судостроение, 1973. – 280 с.
20.Левенберг В.Д., Романовский Г.Ф., Горбов В.М. Энергетиче-
ские установки подводных аппаратов: Учебное пособие. – Николаев:
НКИ, 1978. – 73 с.
21.Лобанов В.А. Справочник по технике освоения шельфа. – Л.: Судостроение, 1983. – 288 с.
22.Малые АЭУ на японских ОПА // Судостроение. – 1992. – № 1.
–С. 10.
23.Марков В.Г., Писаренко Г.К., Разумихин Е.М. Подводный аппарат "Русь" с глубиной погружения 6000 м // Судостроение. – 1991.
–№ 7. – С. 3–6.
24.Машиностроение. Энциклопедический справочник. Конструирование машин / Под общ. ред. Л.К. Мартекса. – Л.; М.: ГНТИМЛ, 1949. – Т. 12. – 716 с.
25.Необитаемые подводные аппараты / Под ред. А.В. Сытина.
–М.: Воениздат, 1975. – 159 с.
26.Николаев В.П., Смирнов Ю.А., Шекалов В.И. Разработка пер-
спективных химических источников тока для объектов ВМФ в США // Судостроение за рубежом. – 1980. – № 5. – С. 56–65.
27.Поспелов Л.И. Конструкции авиационных электрических машин. – М.: Энергоиздат, 1982. – 320 с.
28.Прасолов С.Н., Амитин М.Б. Устройство подводных лодок.
–М.: Воениздат, 1973. – 311 с.
29.Проектирование и постройка стальных торговых судов / Под ред. д'Арнотта: Пер. с англ. – Л.: Гос. союз. изд-во судостроит. пром-
сти, 1959. – 308 с.
30.Пугачевский А.А. Обитаемые подводные аппараты больших глубин // Судостроение за рубежом. – 1989. – № 6. – С. 14–21.
31.Пугачевский А.А. Требования зарубежных классификационных обществ к плавучести и остойчивости обитаемых подводных аппаратов // Судостроение за рубежом. – 1987. – № 12 (252). – С. 44–45.
159

А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
32.Подражанский А.М., Сагалевич А.М. Подводные обитаемые аппараты // Итоги науки и техники. Водный транспорт. – М.:
ВИНИТИ, 1980. – Т. 8. – С. 41–75.
33.Правила классификации и постройки обитаемых подводных аппаратов и глубоководных водолазных колоколов: Регистр СССР.
–Л., 1988. – 156 с.
34.Промышленная робототехника / Л.С. Ямпольский и др. – К.:
Технiка, 1984. – 264 с.
35.Птицын М.В., Целемецкий В.А. Разработка литиевых химических источников тока высокой удельной энергии для зарубежных ВМС // Судостроение за рубежом. – 1987. – № 7. – С. 22–29.
36.Пышнев С.Н. К вопросу об эффективности использования систем регулирования плавучести автономного подводного работа Проектирование подводных аппаратов: Сб. науч. трудов. – Нико-
лаев: НКИ, 1990. – С. 10–19.
37.Пышнев С.Н. Метод определения эффективности системы регулирования плавучести подводных аппаратов. Проектирование судов и судовых устройств:Сб. науч. трудов. – Николаев: НКИ, 1989.
–С. 117–123.
38.Разумихин Е.М. Подводные аппараты "Русь" и "Консул" с глубиной погружения до 6000 м // Судостроение. – 1998. – № 1. –
С. 66–67.
39.Рябов В.М., Хесин Ю.Д. Создание корпусов глубоководных аппаратов из сплавов титана для сверхбольших глубин // Судостро-
ение. – 1991. – № 7. – С. 6–9.
40.Системы и элементы глубоководной техники подводных ис-
следований: Справочник / В.С. Ястребов, Г.П. Соболев, А.В. Смир-
нов и др. – Л.: Судостроение, 1981. – 304 с.
41.Системы оборудования летательных аппаратов: Учебник для студентов втузов / М.Г. Акопов и др. – М.: Машиностроение, 1986. – 368 с.
42.Скачков Ю.В., Белоусов О.А. Перспективы применения электрохимического генератора в составе судовой ЭЭС // Судостроение.
–2003. – № 1. – С. 43–45.
43.Скурский Л.М. Требования зарубежных классификационных обществ к глубоководной технике // Судостроение за рубежом. – 1976. – № 1. – С. 48.
44.Снежницкий И.В. Глубоководный исследовательский подвод-
160