

Казарезов Проеектування пристроiв и систем пiдводных апаратiв
.pdfПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
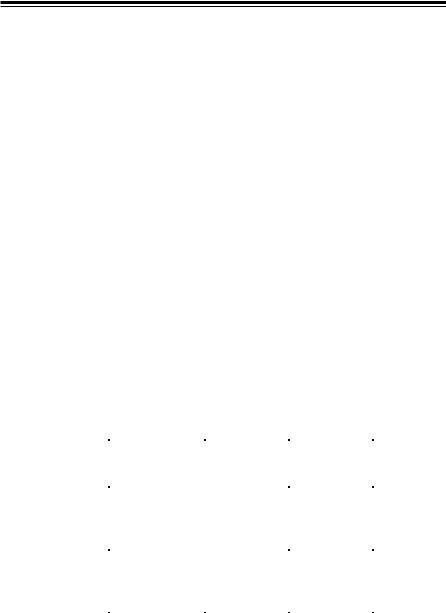
Під робочою зоною МП розуміють область, обмежену в сфероїді радіусними площинами з кутовою відстанню, що дорівнює діапазону переміщення кореневої ланки МП, і радіусом, що дорівнює різниці між максимальним і мінімальним вильотом МП. На рис. 2.58 пока-
зані спрощені схеми компонувань ма- |
30° |
ніпулятора і його зони обслуговуван- |
|
ня [45]. У межах зони обслуговування |
|
(робочої зони) маніпулятор може ви- |
|
вести робочий орган (захват чи зва- |
|
рювальну головку) у будь-яку пози- |
25° |
цію. Обмеження кутових і лінійних |
220° |
переміщень, що виникають у кінема- |
|
тичних парах (з'єднаннях двох сусідніх |
|
ланок маніпулятора) і викликані особ- |
|
ливостями конструктивного оформ- |
|
лення маніпулятора, обумовлюють |
|
заборонені області, у які робочий ор- |
|
ган не може бути виведений. |
|
|
а |
x |
|
z |
|
|
z |
|
у |
270° |
|
|
x |
б |
в |
г |
Рис. 2.58. Спрощені схеми компонувань маніпулятора і зони обслуговування (робоча зона):
а – сферична; б – циліндрична; в – важільна; г – прямокутна
101

А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
Сферичне компонування забезпечує зону маніпуляторів у вигляді зрізаного чи порожнистого тора (див. рис. 2.57,а), циліндричне дає зрізаний чи порожнистий циліндр (рис. 2.57,б), важільне (антропоморфне) – об'єм, обмежений двома сферами, що мають загальний центр (рис. 2.57,в), прямокутне – паралелепіпед (рис. 2.57,г). Розміри цих зон визначаються кінематичною схемою маніпулятора і розмірами її ланок. Найбільш поширені маніпулятори сферичного компонування.
На рис. 2.59 більш докладно зображена геометрія робочих зон для маніпуляторів, що працюють у прямокутній, циліндричній і сферичній системах координат [34]. Геометричні параметри, число ступенів рухомості і спосіб установки на робочому місці є вихідними даними при розробці компонувальних схем МП.
|
B A |
|
|
|
|
|
|
|
|
A |
|
|
C |
α |
|
B |
|
|
|
|
|
|
r |
Е (К) |
|
|
|
|
(K) G E |
L |
|
|
|
(C) |
L |
|
а |
|
б |
B |
r |
|
|
|
|
A |
|
|
D |
|
|
B (C) |
|
|
|
|
|
|
|
α |
A |
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
(K) G E |
|
L |
|
Q |
в |
г |
E
G
L (K)
Q
Рис. 2.59. Геометрія робочих зон маніпулятора в прямокутній (а), циліндричній (б) і сферичній (в, г) системах координат
102

ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
Для переміщення тіла в просторі і його довільної орієнтації виконавчий механізм повинен мати не менше шести ступенів рухомості (вільності): три – для здійснення транспортних (переносних) рухів і три – для ротаційного позиціювання. Людська рука має від передпліччя до фаланг пальців 22 ступеня рухомості. Еквівалентом людської руки може бути механізм, що має ту ж сукупність рухів, до якої в загальному випадку зводяться рухи людської руки. Таким механізмом є маніпулятор із шістьма основними ступенями рухомості в декартовій системі координат і сьомим ступенем, що забезпечує рух губок захватного пристрою.
Використання кінематичних пар п'ятого класу – поступальних, ротаційних з віссю обертання, паралельною осі ланок кінематичної пари, а також з віссю обертання, перпендикулярною осі одної з ланок пари, – у сполученні з тими чи іншими необхідними групами руху дають можливість створювати МП з необхідними робочими зонами функціонування, що працюють у певній (заданій) системі координат.
Робоча зона маніпулятора характеризується такими геометричними параметрами (див. рис. 2.59): L, G – крайні нижнє і верхнє положення маніпулятора; A – положення максимально висунутого маніпулятора; B – початкове положення маніпулятора; C, K – хід (виліт) і підйом маніпулятора; E, Q – крайні верхнє і нижнє положення захватного пристрою; r – радіус гойдання захватного пристрою; α – максимальний кут повороту (ротації) маніпулятора.
Аналіз можливих варіантів кінематичних структур показує наступне:
кількість можливих варіантів зменшується зі зменшенням числа ротаційних пар;
структури з двома ротаційними парами, що мають паралельні осі, а також структури з поступальною і ротаційною парами, що мають взаємно перпендикулярні осі (причому ротаційна пара знаходиться перед поступальною), мають здатність працювати в тіньових ділянках зон для забезпечення обходу перешкод;
довільна орієнтація робочого органа забезпечується структурами, що мають три ротаційні пари, осі яких послідовно розгорнуті на 90о.
Маніпуляторні пристрої широко застосовують на всіх типах населених і ненаселених підводних апаратів. Кількість установлюваних МП може бути від одного до трьох.
103

А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
Для малогабаритних телекерованих ПА характерними є одно-, двочи триступеневі МП вантажопідйомністю від 0,05 до 1 кН із вильотом робочого органа до 1 м.
Аналіз технічних характеристик маніпуляторів на населених дослідницьких ПА [46, 53, 54] указує на те, що їхній максимальний виліт становить від 1,75 м (як для ПА "Shinkai 6500" [44]) до 2,5 м (як для ПА "Мир" і "Nautile" [2]) при вантажопідйомності 0,45...0,90 кН.
МаніпуляторніпристроїнауніверсальнихробочихненаселенихПА мають від п'яти до дев'яти ступенів рухомості (рис. 2.60). Іноді вони мають спрощену конструкцію з числом ступенів рухомості 3–4, але збільшену вантажопідйомність (до 20 кН). Їх використовують для захоплення об'єкта й утримання
|
|
ПА в заданій точці. |
|
|
|
Усі МП за струк- |
|
135° |
турою можна поді- |
||
лити на великі групи |
|||
|
90° |
||
48° |
[46]: маніпулятори з |
||
|
розімкнутою систе- |
||
|
|
||
|
|
моюкеруванняіслід- |
|
|
|
куючі (копіювальні). |
|
|
|
Уманіпуляторахпер- |
|
|
|
шої групи швидкість |
|
|
|
переміщення вико- |
|
|
а |
навчого пристрою |
|
|
|
може бути постій- |
|
120° |
|
ною чи регульова- |
|
20° |
ною. У МП другої |
||
|
групи виконавчий |
||
|
90° |
||
|
орган повторює рух |
||
|
132°90° |
||
60° |
командного плеча з |
||
|
17 |
пропорційною змі- |
|
|
ноюмасштабуішвид- |
||
|
|
кості руху. |
|
|
27 |
На малогабари- |
|
|
|
тних МП широко |
|
|
б |
застосовується авто- |
|
|
матизований елект- |
||
Рис. 2.60. Маніпулятори з п'ятьма (а) і |
роприводзамкнутого |
||
типуздвигунамипос- |
|||
сімома (б) ступенями рухомості ванта- |
|||
тійного струму. |
|||
|
жопідйомністю 0,45 кН |
||
104

ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
Для розширення функцій МП застосовують змінні захоплювачі. Механізми захватних пристроїв є одними з основних елементів МП, що визначають їхні технологічні можливості.
Захватний пристрій складається з привода, підсилювально-переда- вальної та інформаційно-вимірювальної ланок, затискного елемента.
На рис. 2.61 показані різні типи захватних пристроїв [45]. Найбільшого поширення
набули механічні захватні при- |
|
3 4 |
5 |
6 |
|
строї (рис. 2.61,а). Корпус 1 |
1 2 |
||||
|
|
||||
служить одночасно і робочим |
|
|
|
|
|
пневмоциліндром привода, і |
|
|
|
|
|
базою для кріплення рейково- |
|
|
5 |
|
|
важільної передачі 4 підсилю- |
|
|
|
||
|
|
|
|
||
вально-передавальної ланки. |
|
|
|
|
|
Робоче тіло в порожнині цилін- |
|
|
а |
|
|
дра подається по каналах 3. У |
|
|
|
||
залежності від стану клапанів, |
|
9 |
10 |
11 |
|
керуючих цими каналами, пор- |
|
|
|
||
|
|
|
|
||
шень 2 зі штоком і рейкою пе- |
8 |
|
|
|
|
реміщається в заданому на- |
|
|
|
||
|
|
|
|
||
прямку. Переміщення рейки |
|
|
|
|
|
приводить до гойдання секто- |
|
|
|
12 |
|
рів рейково-важільної переда- |
|
|
|
||
чі 4, а разом з тим і спарених |
|
|
13 |
|
|
паралелограмних механізмів з |
7 |
|
|
|
|
губками 6 на кінцях. Викорис- |
|
|
б |
|
|
тання плоскопаралельних ва- |
|
|
|
||
15 |
|
|
|
||
желів у паралелограмних меха- |
|
16 |
11 |
||
нізмах 5 забезпечує строго па- |
|
|
|
||
|
|
|
|
||
ралельне розташування робо- |
|
|
17 |
|
|
чих поверхонь губок 6 у всьо- |
|
|
|
||
|
|
|
|
||
му діапазоні їхнього перемі- |
14 |
|
|
|
|
щення. У такий спосіб викону- |
|
|
|
|
|
ється оптимальне накладення |
|
|
14 |
|
|
утримувальних зв'язків на об'- |
|
|
в |
|
|
|
|
|
|
||
єкт при його захопленні. |
Рис. 2.61. Типи захватів, використо- |
||||
Механічні спарені захватні |
|||||
вувані на кінцевій кінематичній парі |
|||||
пристрої(див. рис. 2.61,б) мають |
маніпуляторного пристрою ПА: |
||||
широкітехнологічніможливості, |
а – механічні, б – спарені, |
||||
що досягається сполученням в |
в – електромагнітні |
|
|||
105
А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
одному захватному пристрої двох механізмів: нижнього 8 і верхнього гравітаційного 9, розташованих у корпусі 12, що кріпиться в руці 11 маніпуляційної системи МП. Об'єкти можна захоплювати між нижнім механізмом 7 і внутрішньою профільованою поверхнею верхнього механізму 8. Для цього привод 13 вертикального переміщувального корпусу 9 верхнього механізму 8 зводить механізми 7 і 8 до повного затиску об'єкта, що знаходиться між ними. У випадку роботи з об'єктами, що не потребують чіткого фіксування в захватному пристрої, використовується гравітаційний призматичний механізм 8. Пристрій оснащений приводом 10 для обертання і здійснення орієнтувальних рухів навколо осі кріплення корпусу 12 до руки 11.
Електромагнітні захватні пристрої (див. рис. 2.61,в) використовуються для об'єктів із феромагнітних матеріалів. Магнітні захватні пристрої відрізняються простотою конструкції, надійністю захвату об'єктів, можливістю керування зусиллям захвату і швидкістю переналагодження та заміни затискних елементів. Пристрій містить електромагнітну систему у вигляді концентраторів 14, розташовуваних на змінних кронштейнах 15, які укріплені на основі 16. Магнітний захватний пристрій установлюється на кисті 17 і руці 11 маніпуляторного пристрою.
Технічні характеристики деяких маніпуляторних пристроїв ненаселених ПА наведені в табл. 2.22.
Таблиця 2.22. Технічні характеристики маніпуляторних пристроїв
ненаселених ПА
|
Вантажопід- |
Число сту- |
Максима- |
Тип робо- |
|
Тип, фірма |
йомність/ма- |
пенів рухо- |
льний ви- |
чого ор- |
|
|
са, кг |
мості |
літ |
гана |
|
MR-1, "Dcep |
1,0/2,4 |
1 |
0,46 |
Захват |
|
ocean system" |
|||||
|
|
|
|
||
MR-2, "Dcep |
3,0/5,6 |
2 |
0,58 |
Захват |
|
ocean system" |
|||||
|
|
|
|
||
Kodiak Inc. |
45/75 |
5 |
1,60 |
Захват |
|
Kodiak Inc. |
45/88 |
7 |
1,50 |
Захват |
|
MER |
60/90 |
5 |
1,70 |
Захват |
|
1001/MERPRO |
|||||
|
|
|
|
||
MER |
45/78 |
6 |
1,50 |
Захват |
|
1088/MERPRO |
|||||
|
|
|
|
106

ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
На рис. 2.62 показано типове розміщення маніпуляторів на робочому ПА.
Блок плавучості
Корпус системи |
|
Навігаційна |
керування |
|
|
|
|
телекамера |
|
|
Підрулюючий пристрій |
|
|
з гідроприводом |
|
|
Технологічна телекамера |
|
|
з регульваним положенням |
|
|
і підсвічуванням |
Насосна |
|
|
станція |
|
|
Рама з |
|
|
нержавіючої |
|
|
сталі |
|
|
Клапанна коробка |
Колектор шлангів |
Захоплювачі 6-ступеневих |
гідравлічних клапанів |
виконавчих механізмів |
маніпуляторів |
Рис. 2.62. Розміщення двох маніпуляторів із шістьма ступенями рухомості на універсальному робочому ПА "Rigworker-3000L"
Кінематика сучасного гідравлічного маніпулятора наведена на рис. 2.63.
5 |
4 |
|
26 °
1 300 мм
2 |
|
85° |
3 |
Рис. 2.63. Кінематична схема 6-ступеневої рухомості гідравлічного маніпулятора:
1 – плече; 2 – передпліччя; 3 – кисть; 4 – захоплювач; 5 – привод плеча, що забезпечує телескопічний кут 26°
107

А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
На рис. 2.64 показано зовнішній вигляд гідравлічного маніпулятора батискафа "Trieste-2" [12], а на рис. 2.65 – шведського багатоцільового телекерованого ПА "Sea Twin" для роботи на глибині 500 м з одним маніпулятором 3-ступеневої рухомості вантажопідйомністю 0,26 кН (маса ПА 300 кг, габаритні розміри: довжина – 2,1 м; шири-
на – 1,3; висота – 0,7 м).
Рис. 2.64. Зовнішній вигляд гідравлічного маніпулятора батискафа
"Trieste-2"
Рис. 2.65. Підводний апарат "Sea Twin"
На рис. 2.66 показаний зовнішній вигляд англійського ПА
108

ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
"Offshore Hyball" із двоступеневим маніпулятором "DV 7000" захоплювачем у вигляді трьох 100-міліметрових пальців. Габарити ПА: довжина – 0,575 м; ширина – 0,77 м; висота – 0,53 м; маса 60 кг. Вантажопідйомність МП становить 0,1 кН.
а |
б |
Рис. 2.66. Підводний апарат "Offshore hyball" (а)
і маніпулятор "DV 7000" (б)
На рис. 2.67 показаний зовнішній вигляд ПА "MiniROVER MKII" (США, 1988 р.) із причепним маніпулятором типу MR-1. Технічні характеристики деяких маніпуляторів населених ПА наведені в табл. 2.23.
а |
б |
Рис. 2.67. Підводний апарат "MiniROVER MKII" (а) і змінні захоплювачі (б) для маніпулятора (ліворуч від апарата)
109

110 |
Таблиця 2.23. Технічні характеристики маніпуляторів населених ПА |
|
|
|||||
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Кількість |
Радіус ро- |
|
Зусилля |
Число сту- |
|
Розмір зраз- |
|
|
Вантажопід- |
утримання |
Маса, |
ка, що від- |
|||
|
Назва |
маніпулято- |
бочої зони, |
йомність, Н |
захоплюва- |
пенів віль- |
кг |
бирається, |
|
|
рів, шт. |
м |
|
чів, Н |
ності |
|
мм |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
"Alvin" |
1 |
0,90 |
220 |
230 |
– |
– |
– |
|
"Shinkay - |
1 |
1,50 |
450 |
450 |
6 |
145 |
150 |
|
2000" |
|||||||
|
|
|
|
|
|
|
|
|
|
"Chek |
1 основний, |
2,50 |
780 |
960 |
– |
250 |
150 |
|
Maity" |
2 допоміжні |
||||||
|
|
|
|
|
|
|
||
|
"PS-1202" |
2 |
1,80 |
300 |
800 |
6 |
– |
– |
|
"Paeisis- |
1 основний, |
– |
980 |
980 |
6 |
– |
– |
|
VII" |
1 вантажний |
– |
980 |
– |
3 |
– |
400 |
|
|
|
|
|
|
|
|
|
|
"Deap |
2 |
1,83 |
2200 |
– |
– |
– |
– |
|
Quast" |
|||||||
|
|
|
|
|
|
|
|
|
|
"BM- |
1 |
2,50 |
780 |
980 |
– |
250 |
– |
|
2500"* |
|||||||
|
"BM - |
1 |
1,30 |
200 |
220 |
7 |
28,1 |
– |
|
1600"* |
|||||||
|
"UВМ- |
1 |
1,58 |
600 |
1000 |
7 |
130 |
140 |
|
1.6/50"* |
|||||||
|
" UВМ - |
1 |
2,5 |
800 |
1400 |
7 |
250 |
150 |
|
2.5/80"* |
|||||||
Примітка. * Серійні робочі модулі для будь-якого апарата.
Пишнєв .М.С ,Галь .Ф.А ,Казарєзов .Я.А
