

Казарезов Проеектування пристроiв и систем пiдводных апаратiв
.pdfПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
плуатації розрізняють ГЦ низького, середнього і високого тиску. Для перших характерними є тиск до 1,5 МПа і швидкості перемі- щенняштокадо0,3 м/с; дляГЦдругоїгрупитискстановить6,5...13,0 МПа і швидкість переміщення штока 0,4...0,5 м/с; для третьої – відповідно 16...25 МПа і 1,0...1,2 м/с. Ресурс ГЦ становить 3...5 тис. год. Як робочу рідину використовують мастила типу АМГ-10, МГИ-10А,
ИГП-18.
|
|
|
|
р А |
Дренаж |
|
А |
|
|
|
|
|
|
А |
1 |
2 |
|
3 |
4 |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
6 |
|
|
5 |
|
||
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
А |
г |
|
|
|
|
|
|
|
|||
|
|
|
|
|
а |
|
|
|
|
б |
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
г |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
е |
ж |
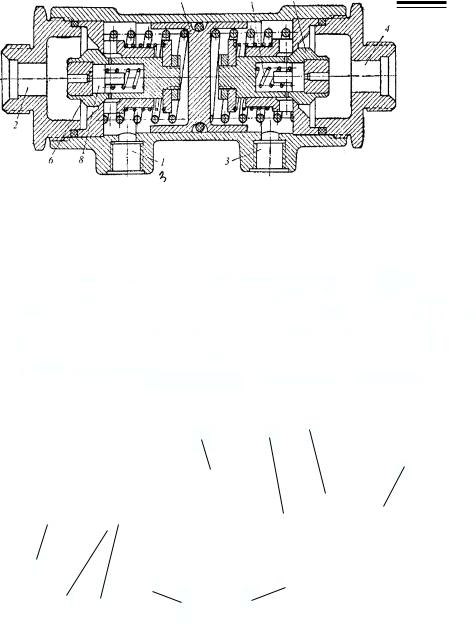
Рис. 2.47. Схеми силових циліндрів поступального руху:
а – односторонньої дії; б, в – двосторонньої дії; г – з двома фіксованими ходами; д – плунжерного типу; е – телескопічного типу; ж – двокамерного типу (тандем – циліндр); А – робочі камери; 1, 2 – штуцери живлення;
3 – поршень; 4 – циліндр; 5 – шток; 6 – ущільнювальні пристрої
Зусилля, що розвиваються гідроциліндрами, складають від декількох кілограмів до декількох тонн. Силові параметри ГЦ визначаються такими залежностями.
При максимальному ході Smax, см, швидкості руху штока Vшт, см/с, і робочому тиску Рр, кН/см2, зусилля, що розвивається ГЦ, становить
R = Pp Fп ky кН,
де Fп – корисна площа поршня в см2; ky – коефіцієнт утрат, прийма-
ється ky = 0,90.
Необхідна витрата робочої рідини
Q =Vш Fп см3/с,
91

А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
а необхідний час переміщення поршня
τ п = Smax c.
Vш
Коефіцієнт утрат гідроциліндра включає в себе дві складові – від механічних утрат на тертя ущільнювальних елементів η м ≈ 0…0,92
і об'ємний ККД η об ≈ 0,92...0,98:
kп= η y η об.
Як електромеханічні пристрої, що забезпечують лінійне поступальне переміщення робочого органа, використовують моторредуктори типу ЭТМ-100 і ЭТМ-150 із приводом постійного струму. Поступальний рух забезпечується за рахунок гвинтової пари. Зусилля, що розвиваються пристроями, становлять 1,0...1,5 кН, напруга живлення привода – 27 В, переміщення штока – 100...110 мм, швидкість переміщення – близько 0,02 м/с.
Електромеханічні пристрої, розташовані поза міцним корпусом ПА, необхідно капсулювати у герметичний міцний корпус.
У системах ПА, потребуючих значних лінійних переміщень (більше 0,2 м) і швидкостей (більше 1,5 м/с), використовують спеціалізовані приводи на базі лінійних електродвигунів, які виготовляються малими партіями за замовленням. Ці приводи розвивають зусилля від 3 до 7 кН при швидкості руху робочого органа до 25 м/с. Питомі показники маси і потужності, що припадають на 1 кН робочого зусилля (відношення маси і потужності до зусилля), становлять:
kp =1,7…1,9 кг/кН; kN = 0,8…1,0 кВт/кН.
Конструктивно лінійні електроприводи (ЛЕП) прагнуть розмістити усередині міцного корпусу в безпосередній близькості від виконавчого пристрою.
Для здійснення зворотно-поступального руху найбільш широко в техніці використовуються гідроциліндри (рис. 2.48). ККД гідроциліндра дорівнює 0,85...0,99 [24, 47]. Чим вище тиск у гідроциліндрі, тим вище ККД. Звичайно поршень гідроциліндра рухається в обох напрямках з однаковою швидкістю. Для ходу вправо напірний трубопровід з'єднується з обома каналами, для ходу вліво – лише з пра-
92

ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
вим, лівий працює на злив. Вхідні канали робляться тільки зверху гідроциліндра.
1 |
2 |
4 |
|
3 |
|
|
|
5 |
Рис. 2.48. Гідроциліндр:
1, 4 – вхідний і вихідний канали; 2 – поршень; 3 – корпус; 5 – шток
Удару поршня об стінку гідроциліндра при великих швидкостях руху запобігають спеціальні гальмівні пристрої, сконструйовані за принципом дроселювання (рис. 2.49). Дроселі – це пристрої, які спеціально створюють утрати напору. Вони поділяються на регульовані і нерегульовані.
2 |
|
|
|
3 |
4 |
5 |
|
|
|
|
|||||
|
|
|
|
|
|
6 |
1 |
7 |
|
Рис. 2.49. Гідроциліндр із гальмівним пристроєм:
1, 6 – вхідний і вихідний канали; 2, 5 – дроселі; 3 – поршень; 4 – корпус; 7 – шток
93

|
|
|
А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв |
|
У техніці поширені так звані дроселі Ексцелло (діафраг- |
||||
мовий і ексцентриковий) (рис. 2.50). У діафрагмовому дроселі |
||||
основну |
частку втрат складають утрати енергії на удар рідини |
|||
(форма |
дроселя наближається |
|
||
до отвору з гострою кромкою). |
|
|||
Регулювання дроселя здійсню- |
о |
|||
ється зміною відкриття щілини |
||||
0 |
||||
1 |
||||
|
|
|
51 |
|
шляхом опускання |
поршенька. |
5 |
||
|
||||
|
|
|
12 |
|
311 |
|
а |
б |
Рис. 2.50. Діафрагмовий (а) та ексцентриковий (б) дроселі |
|
|
Ексцелло (відкритий стан) |
с В ексцентриковому дроселі найбільш істотними є втрати енергії на |
|
тертя струмків через вузькості каналу дроселюючого отвору (канал |
|
має велику довжину при малому гідравлічному радіусі перерізу). Ре- |
|
гулювання дроселя здійснюється поворотом поршенька з ексцентрич- |
|
ною виточкою (таким чином змінюються довжина і форма дросе- |
|
люючого каналу). |
|
До нерегульованих дроселів відносяться різні дросельні щілини |
|
(наприклад, з косою і прямою, напівкруглою і прямою кромками |
|
і т. п.). При протіканні гідравлічної рідини під великими перепа- |
|
дами тисків через вузькі щілини може відбуватися засмічення дро- |
|
селів. |
|
Для зменшення засміченості встановлюють ряд послідовно з'єд- |
|
наних дроселів. На рис. 2.51 показаний багатоступінчастий дросель, |
|
94
ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
який застосовується при недопустимості засмічення. Він складається з пакета дисків товщиною 1 мм, у яких просвердлено по одному отвору діаметром 1 мм. Регулювання дроселя здійснюється опусканням пакета.
Загальний вигляд і габаритні розміри гідроциліндра простої конструкції (тиск до 106 атм) наведені на рис. 2.52 і в табл. 2.18. Для фіксації поршня в будь-якому бажаному положенні такий гідроциліндр має бути оснащений гідравлічним замком (рис. 2.53).
Рис. 2.51. Багатоступінчастий регульований дросель
|
хіg+X |
|
р |
р 12,7 |
V |
Н |
S |
B |
R |
T |
2H |
Рис. 2.52. Гідроциліндр простої конструкції
5 |
9 |
7 |
|
||
|
|
2

6 |
8 |
1 |
3 |
Рис. 2.53. Гідравлічний замок

 W
W
W B+6.35 |
4
95

А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
Таблиця 2.18. Габаритні розміри гідроциліндрів, мм
Типорозмір |
B |
H |
R |
S |
V |
W |
X |
3 |
19,05 |
6,350 |
6,350 |
3,175 |
14,288 |
7,938 |
107,950 |
4 |
25,40 |
9,525 |
9,525 |
6,350 |
19,050 |
15,875 |
119,063 |
5 |
31,75 |
9,525 |
12,700 |
9,525 |
19,050 |
15,875 |
127,000 |
6 |
38,10 |
12,700 |
19,050 |
12,70 |
28,575 |
19,050 |
141,288 |
7 |
44,15 |
12,700 |
19,050 |
15,875 |
28,575 |
22,225 |
147,638 |
8 |
50,80 |
19,050 |
22,225 |
19,05 |
33,338 |
25,400 |
186,975 |
10 |
63,50 |
25,400 |
28,575 |
25,400 |
42,863 |
34,925 |
200,025 |
12 |
76,20 |
25,400 |
31,750 |
31,750 |
47,625 |
41,275 |
223,838 |
Отвори 1 і 3 з'єднані з живильними трубопроводами, а 2 і 4 – з порожнинами гідроциліндра. Подача робочої рідини в отвір 1 гідравлічного замка зсуває праворуч поршень 5, що відкриває для зливу клапан 7. Підвищений тиск відкриває клапан 6 і з'єднує між собою отвори 2 і 1. Припинення подачі робочої рідини скидає тиск в отвір 2, повертає поршень 5 гідравлічного замка в середнє положення, закриває клапани 6 і 7 та фіксує положення поршня гідроциліндра. Клапани 8 і 9 є запобіжними.
При необхідності фіксації поршня гідроциліндра в крайніх положеннях застосовують кулькові замки (рис. 2.54). У крайньому лівому положенні кулька 1 запирає поршень гідроциліндра. Для переведення поршня гідроциліндра в крайнє праве положення робоча рідина
4 |
|
5 |
|
|
|
3 |
1 |
11 |
6 |
|
|
70 |
2 |
8
7 |
12 |
9 |
|
||
|
|
10 |
36 |
13 |
Рис. 2.54. Гідроциліндр із кульковими замками
96

ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
подається в отвір 2 (зливаючись через отвір 13), віджимає клапан 3 вліво
ізвільняє кульку 1. Переміщення поршня гідроциліндра вправо зрушує сигналізатор 6, опускає кульку 4, вмикає електричний контакт 5 і засвічує лампочку на щиті керування. У крайньому лівому положенні сигналізатор 7, переміщуючись вправо разом із клапаном 10, піднімає кульку 8 і вмикає елекричний контакт 9. Після підйому кульки 11 у кільце 12 клапан 10 під впливом пружини повертається вліво
іфіксує поршень гідроциліндра в правому положенні. Зливання робочої рідини відбувається через отвір 2.
Розроблені і виготовляються гідроциліндри середнього і високого тиску (рис. 2.55): гідроциліндри з робочим тиском 16 МПа (160 кгс/см2) і діаметрами поршня 80...360 мм розвивають зусилля 80...1628 кН (8...163 тс); гідроциліндри з робочим тиском 25 МПа (250 кгс/см2) з діаметрами поршня 25...160 мм розвивають зусилля
12...502 кН (1,2...50,0 тс).
Рис. 2.55. Зовнішній вигляд гідроциліндрів
На рис. 2.56 показаний зовнішній вигляд гідроциліндрів серії МТ і гідронасосів серії МТР.
Рис. 2.56. Зовнішній вигляд гідроциліндрів типу МТ і насосів серії МТР
97

А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
Технічні характеристики гідроциліндрів типу МТ і гідронасосів типу МТР наведені відповідно в табл. 2.19 і 2.20. На рис. 2.57 і в табл. 2.21 показані зовнішній вигляд і геометричні розміри гідроциліндрів типу МТ і гідронасосів типу МТР, використовуваних у рульових пристроях.
Таблиця 2.19. Характеристики гідроциліндрів типу МТ
|
Характеристика |
МТ230 |
|
МТ345 |
МТ455 |
|
МТ600 |
МТ900 |
МТ1200 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Максимальний |
мо- |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
мент із 35-градус- |
2207 |
|
3335 |
4415 |
|
5886 |
|
8829 |
|
11772 |
|
||||
|
ним поворотом, Н м |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Хід штока, мм |
|
|
200 |
|
300 |
|
400 |
|
200 |
|
300 |
|
400 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Максимальний |
|
|
|
|
|
|
6178 |
|
|
|
|
|
|||
|
тиск, кПа |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Об'єм циліндра, см3 |
500 |
|
750 |
|
1000 |
|
1319 |
|
1978 |
|
2638 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Загальний |
кут |
по- |
|
|
|
|
70 |
|
|
|
|
|
|
||
|
вороту, град |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Довжина плеча, мм |
175 |
|
260 |
|
350 |
|
175 |
|
260 |
|
350 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Маса, кг |
|
|
|
13,8 |
|
15,9 |
|
18,0 |
|
35,1 |
|
38,8 |
|
42,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Розміри трубки, мм |
|
|
|
|
8 |
15 |
|
|
|
|
|
||||
Таблиця 2.20. Характеристики гідронасосів типу МТР |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Характеристика |
|
|
МТР89 |
|
|
МТР151 |
|
МТР191 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Ємність, см3 |
|
|
89 |
|
|
|
151 |
|
|
|
191 |
|
|
||
|
Максимальний |
|
|
|
|
|
|
6178 |
|
|
|
|
|
|
||
|
тиск, кПа |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Маса, кг |
|
|
|
9,1 |
|
|
|
23 |
|
|
|
23 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Розміри |
трубки, |
|
|
|
|
|
8 15 мм |
|
|
|
|
||||
|
мм |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
98

ПРОЕКТУВАННЯ ПРИСТРОЇВ І СИСТЕМ ПІДВОДНИХ АПАРАТІВ
МТР 151
|
163 |
25 |
|
|
5 |
161 |
|
|
196 |
|
|
|
110 |
20 |
|
|
|
|
|
22 |
|
12,5 |
22 |
58 |
161 |
45 |
209 |
100 |
196 |
|
376 |
|
Хіу
35о |
35о |
Е

Вал
А

 В
В
З′єднання з фундаментом
МТР 191
С
G
F
IL |
K |
H |
|
||
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
МТР 89 |
109 |
|
Кришка заливної |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
головіни |
|
|
109 |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10,5 |
|
|
||
|
126 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
87 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
19 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
18 |
|
|
|
|
|
|
|
90 |
|
|
|
22 |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
148 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
131 |
|
|
|
|
120 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
339 |
|
|
|
|
|
|
|
|
|
|
|
|
|
150 |
|
|
||
Повітряний кран для спуска рідини
Z
O
P
R
Рис. 2.57. Геометричні розміри гідроциліндрів типу МТ і гідронасосів типу МТР
99

А.Я. Казарєзов, А.Ф. Галь, С.М. Пишнєв
Таблиця 2.21. Геометричні розміри гідроциліндрів типу МТ
Тип |
A |
B |
C |
D |
E |
F |
G |
H |
|
гідроциліндра |
|||||||||
|
|
|
|
|
|
|
|
||
МТ230 |
733 |
607 |
127 |
200 |
175 |
112 |
140 |
143 |
|
МТ345 |
933 |
757 |
177 |
300 |
260 |
112 |
140 |
215 |
|
МТ455 |
1133 |
907 |
227 |
400 |
350 |
112 |
140 |
286 |
|
МТ600 |
735 |
695 |
40 |
200 |
175 |
162 |
198 |
143 |
|
МТ900 |
935 |
845 |
90 |
300 |
260 |
162 |
198 |
215 |
|
МТ1200 |
1135 |
995 |
140 |
400 |
350 |
162 |
198 |
286 |
|
Тип |
I |
K |
L |
M |
N |
O |
P |
R |
|
гідроциліндра |
|||||||||
|
|
|
|
|
|
|
|
||
МТ230 |
36 |
11 |
72 |
100 |
31 |
25 |
28 |
55 |
|
МТ345 |
36 |
11 |
72 |
100 |
31 |
25 |
28 |
55 |
|
МТ455 |
36 |
11 |
72 |
100 |
31 |
25 |
28 |
55 |
|
МТ600 |
74 |
18,5 |
148 |
180 |
25 |
35 |
40 |
102 |
|
МТ900 |
74 |
18,5 |
148 |
180 |
25 |
35 |
40 |
102 |
|
МТ1200 |
74 |
18,5 |
148 |
180 |
25 |
35 |
40 |
102 |
2.10. Маніпулятори і маніпуляторні пристрої
Під маніпулятором розуміють дистанційно керований механізм, що являє собою розімкнутий кінематичний ланцюг, оснащений робочим органом і у загальному випадку – приводами для виконання рухових функцій, що заміняють аналогічні функції руки людини при переміщенні об'єктів і забезпеченні технологічних операцій. Цей механізм звичайно входить до складу маніпуляторного пристрою (МП) у вигляді розгорнутого багатоланкового механізму чи телескопічної штанги, що має можливість переміщення в декількох площинах, за числом яких визначають ступінь рухомості маніпулятора.
Маніпуляторні пристрої, використовувані на ПА, включають у свій склад наступні елементи: електропривод або гідравлічну насосну станцію і гідроциліндри; систему керування; кінематичні пари і робочий орган [23, 38, 39, 43, 50] (захват, різак для тросів, фреза, зачисна машинка, струминний насос і т. д.). Вони можуть бути класифіковані за такими ознаками: кількістю ступенів рухомості (від 1 до 9); вантажопідйомністю (від 0,5 до 200 кг); типом привода (електричні і гідравлічні); способом кріплення до несучої рами апарата (нерухоме, шарнірно-рухоме, на висувній платформі); матеріалами – металеві і неметалеві (композитні).
100