

6.1 Характеристики транспортных потоков
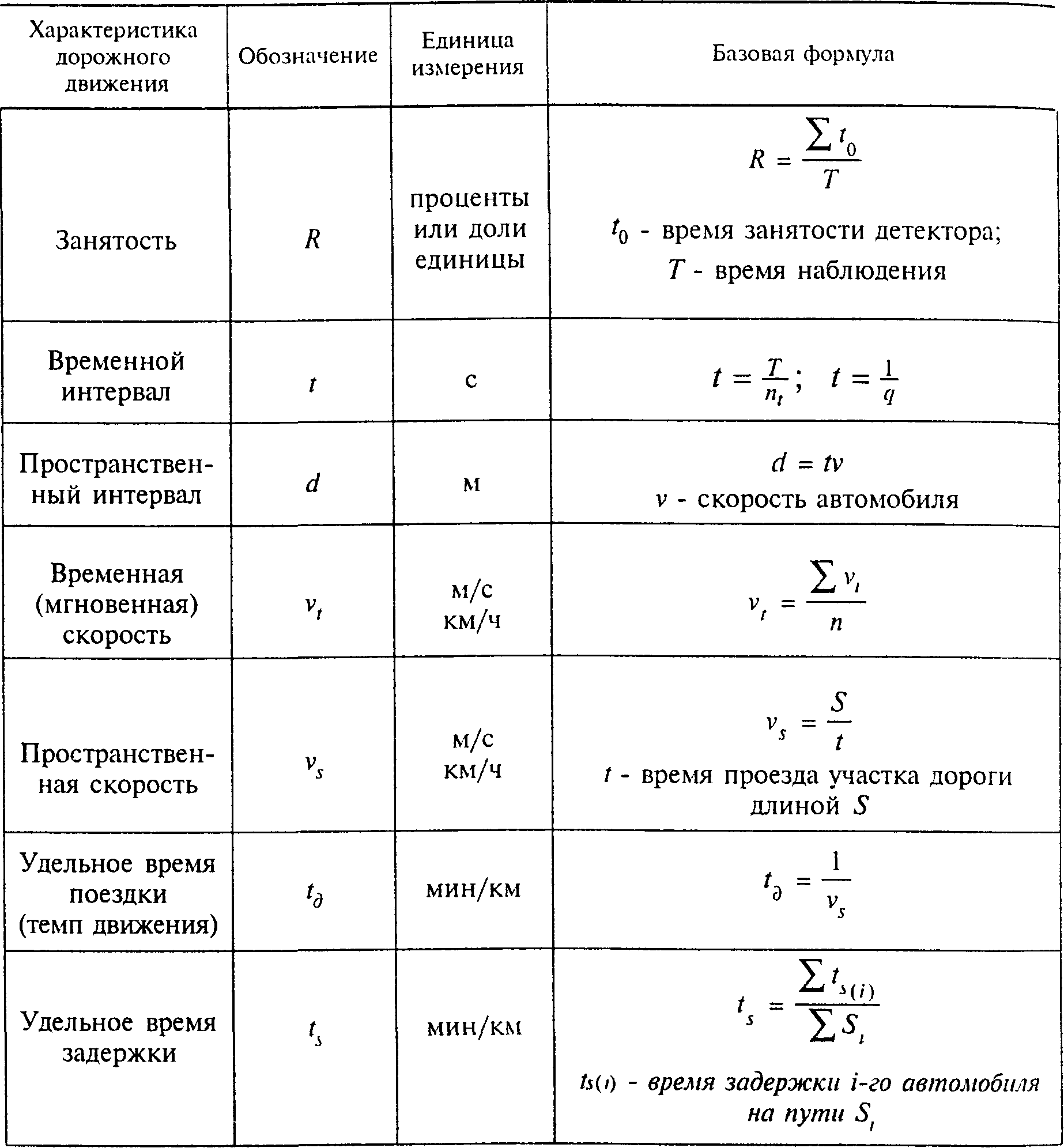
Принятие решений по организации дорожного движения и перевозок, планированию работы транспортных систем, оценка эффективности функционирования улично-дорожной сети возможны только на основе изучения параметров транспортных потоков и зависимостей между ними в конкретных условиях. Поэтому сбор и обработка информации о зависимостях между основными характеристиками транспортных потоков - интенсивностью, плотностью и скоростью - является существенной частью деятельности по организации дорожного движения Сводная таблица основных параметров дорожного движения приведена в таблице 6.1.
Таблица 6.1.
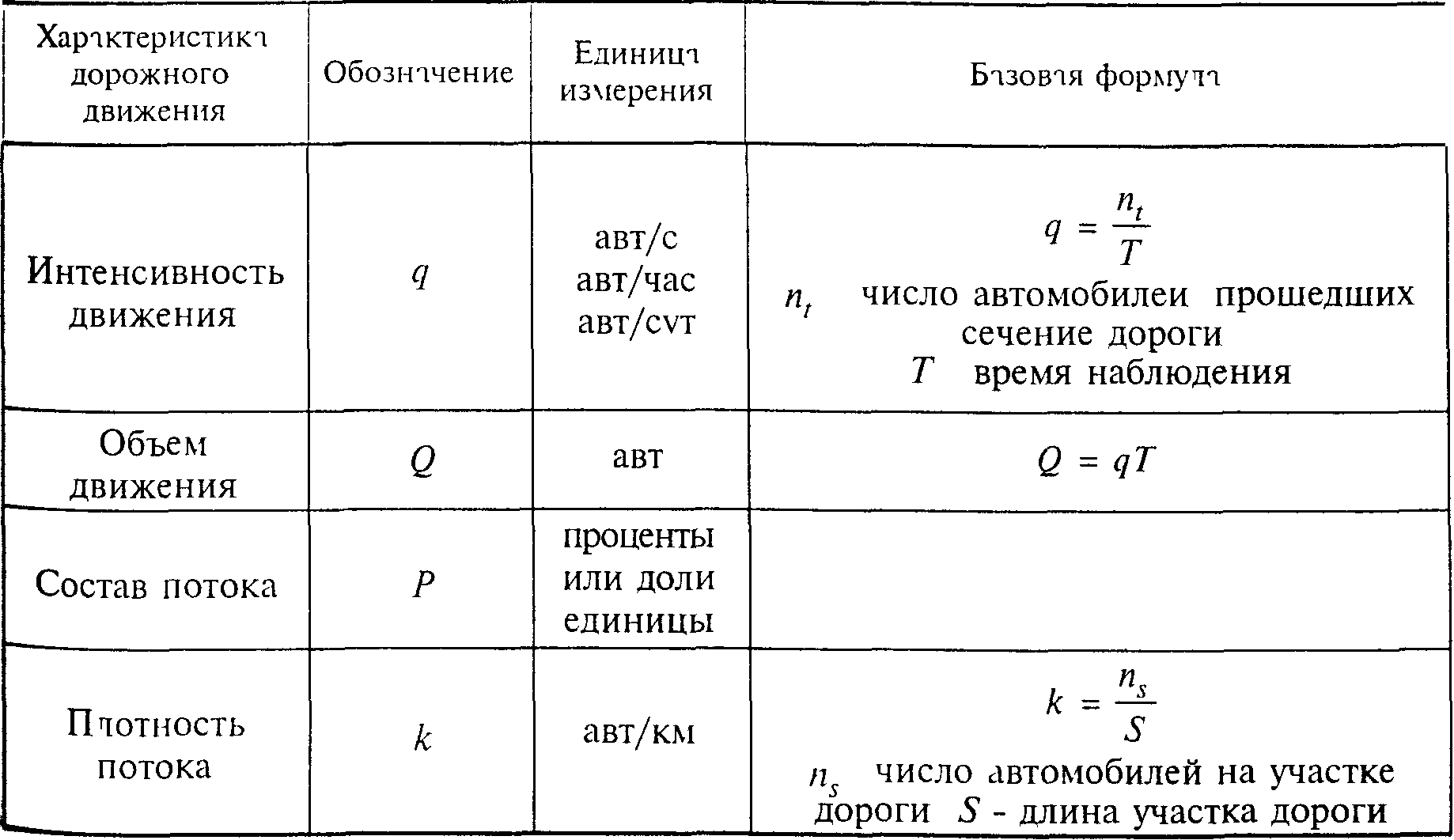
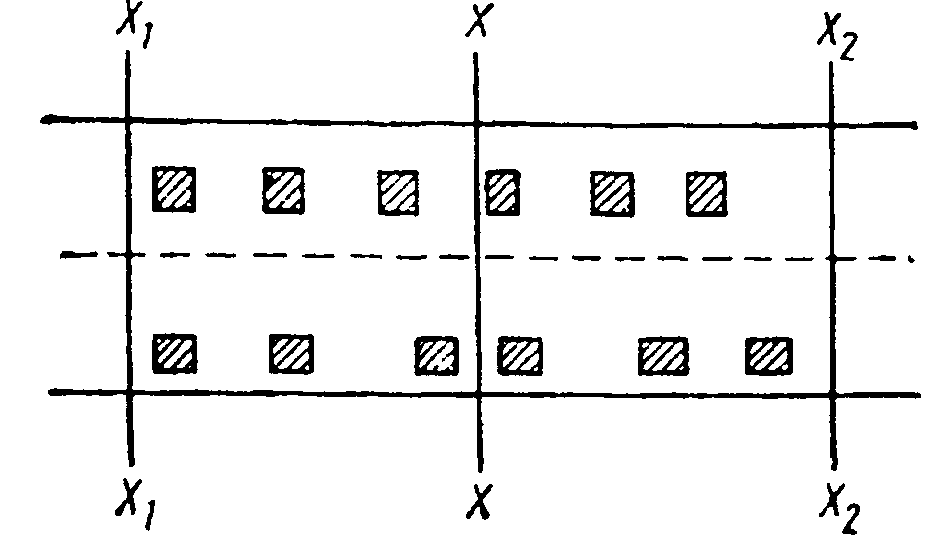
Интенсивность движения q (x,t1,t2) - это количество транспортных средств, проходящих через какое-либо сечение или отрезок дороги за единицу времени (рис. 6.1). Наиболее часто в качестве промежутка времени принимается один час, и, соответственно, интенсивность движения определяется как авт/час. При решении некоторых задач используется информация о суточной и среднегодовой интенсивности движения.
Одной из основных особенностей изменения интенсивности движения является ее неравномерность во времени и пространстве. Распределение интенсивности движения по временным периодам определяется целями поездок и их частотой. Пространственное распределение интенсивности движения связано с распределением грузо - и пассажирообразующих пунктов, их концентрацией и мощностью.
Рис. 6.1. Схем движения транспортных
средств на участке Х1
Х2в течение времениt1;
t2.
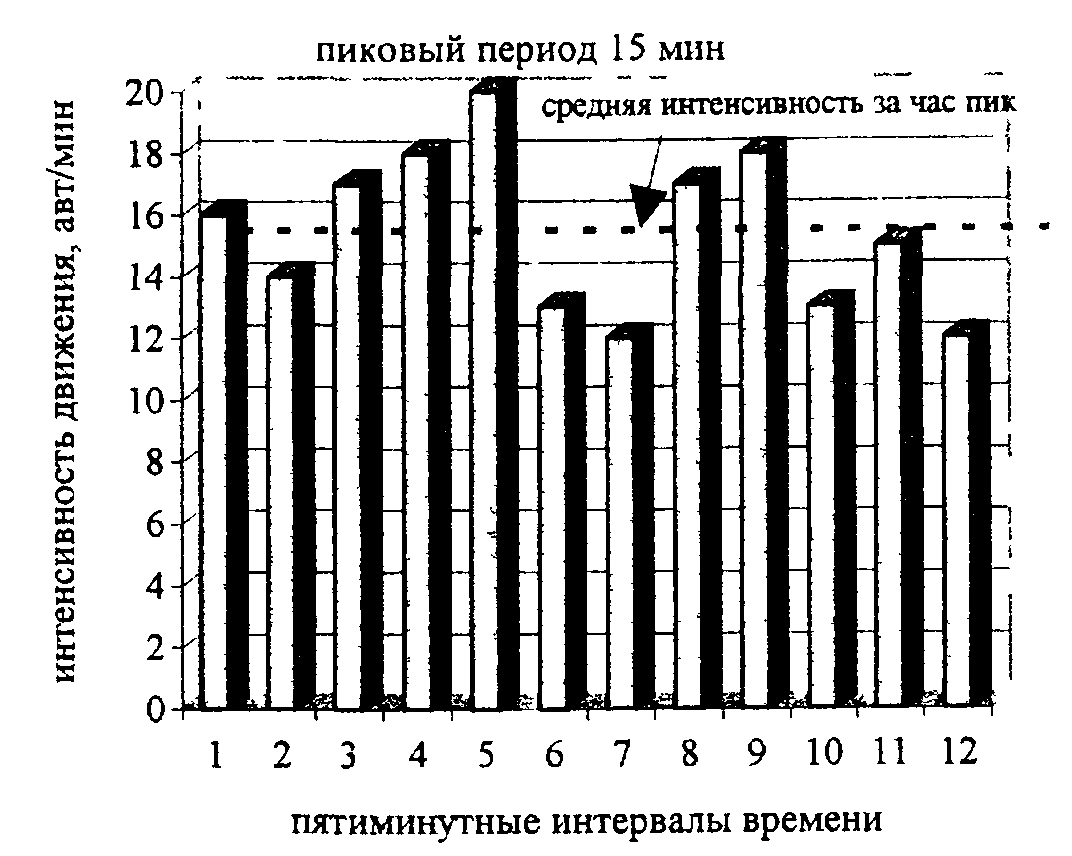
Важнейшей информацией, которой руководствуются при организации дорожного движения, являются сведения о пиковых нагрузках. Изменение интенсивности движения в течение суток характеризуется прежде всего наличием утреннего и вечернего часов пик. В течение этих периодов времени отмечается высокая транспортная нагрузка, которая создает значительные проблемы участникам дорожного движения. Во время часа пик транспортная нагрузка составляет около 15 % суточной. Типичный график изменения интенсивности движения в течение суток приведен на рис. 6.2.
Рис. 6. 3. Выделение пикового периода
времени
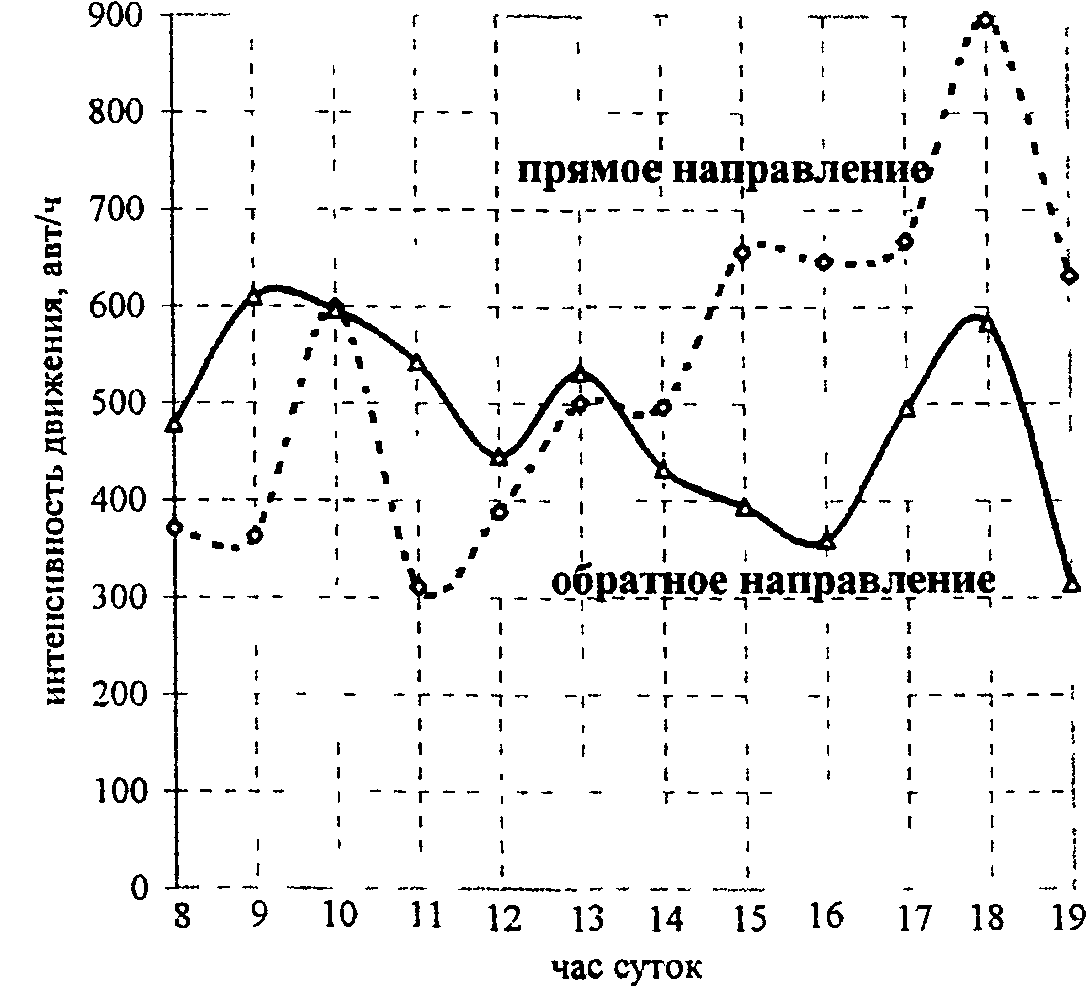
В данном примере интенсивность движения в 15-минутный период пик на 20% превышает среднюю интенсивность за час пик. Игнорирование этого фактора может привести к ошибочным решениям при разработке схем организации дорожного движения.
Сезонные колебания интенсивности движения способствуют формированию плотных транспортных потоков в летний период времени.
Пространственные колебания интенсивности движения проявляются в разном уровне транспортной нагрузки на различных участках улично-дорожной сети.
![]() (6.1)
(6.1)
Так, например, коэффициент годовой неравности
 (6.2)
(6.2)
Где 12 – число месяцев в году, qi – интенсивность движения за рассматриваемый месяц.
Интенсивность движения оказывает влияние на транспортные затраты (рис. 6.4).
Составтранспортного потока существенным образом влияет на условия и режимы движения автомобилей. Оценка состава транспортного потока осуществляется, в основном, по процентному составу или доле транспортных средств различных типов. Объективная оценка уровня транспортной нагрузки, сравнение уровня загрузки различных магистралей могут быть произведены только с учетом состава транспортного потока.
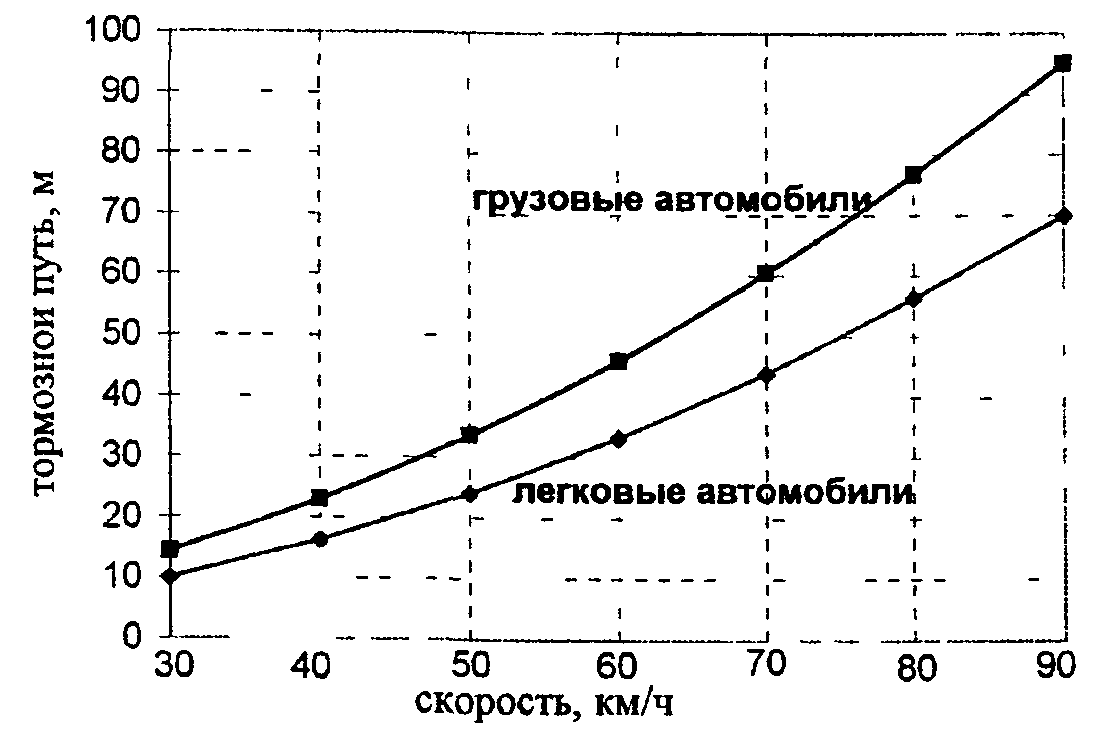
Влияние состава потока на другие характеристики дорожного движения обусловлено многими факторами. Во многом это происходит вследствие различия динамических и тормозных качеств легковых и грузовых автомобилей. На рис. 6. 5 приведены нормативные данные о длине тормозного пути для грузовых и легковых автомобилей. В процессе эксплуатации эти различия становятся еще более ощутимыми. Поэтому в смешанном транспортном потоке повышается вероятность возникновения потенциально опасных ситуаций.
Более низкая скорость движения грузовых автомобилей по сравнению с легковыми вынуждает водителей легковых автомобилей совершать обгоны для поддержания приемлемого для них скоростного режима. Маневрирование осуществляется в условиях ограниченной видимости при следовании легкового автомобиля за грузовым и также повышает риск попадания в ДТП.
Все эти аспекты обусловили необходимость применения коэффициентов приведения к условному легковому автомобилю. Определение значений коэффициентов приведения базируется на сравнении динамических габаритов различных типов транспортных средств Динамическим габаритом автомобиля Dназывается отрезок полосы дороги, включающий длину автомобиля и дистанцию, необходимую для безопасного следования за впереди идущим автомобилем (рис. 6.6).
В соответствии со СНиП 2 05-85 значения коэффициентов приведения к условному легковому автомобилю следует принимать
Рис. 6.4. Изменение затрат С на пробег в
зависимости от интенсивности qдвижения: 1 - легковой автомобиль; 2 -
грузовой автомобиль; 3 – автопоезд.
Рис. 6.6. Динамический габарит автомобиля
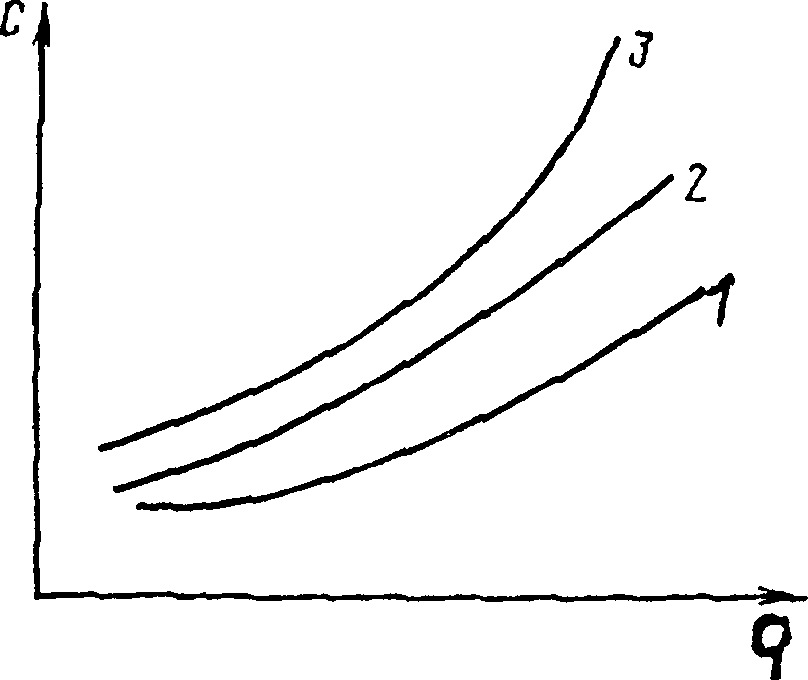

Рис. 6.5. Нормативные значения тормозного
пути легковых и грузовых автомобилей
в зависимости от скорости
-
легковые автомобили
- 1
грузовые автомобили грузоподъемностью:
до 2 т
- 1,5
от 2 до 6 т
- 2
от 6 до 8 т
- 2, 5
от 8 до 14 т
- 3
свыше 14 т
- 3, 5
автопоезда грузоподъемностью до 12 т
- 3, 5
автопоезда грузоподъемностью от 12 до 20 т
- 4
автобусы
- 2, 5
троллейбусы
- 3
сочлененные автобусы и троллейбусы
- 4
Расчет интенсивности движения в приведенных единицах производится по формуле
![]()
где qпр- интенсивность движения в приведенных единицах,qi - интенсивность движения автомобилейi-го типа,Кпрi -коэффициент приведения автомобилейi -го типа
Важность использования коэффициентов приведения при решении практических задач организации дорожного движения видна на примере анализа транспортной нагрузки на двух участках дорог. На первом участке при суммарной интенсивности движения 500 авт/ч распределение автомобилей по типам имеет следующий вид легко вые - 400, грузовые грузоподъемностью до 2 т - 80, автобусы - 20 На другом участке при той же интенсивности движения 500 авт/ч состав потока отличается: легковые - 200, грузовые до 2 т - 100, грузовые от 2 до 6 т - 100, автопоезда до 12 т - 60, автобусы - 40. С учетом состава потока интенсивность движения в приведенных единицах на первом участке составляет 570 авт/ч,на втором - 760 авт/ч.
В зависимости от преобладания в потоке того или иного типа транспортного средства условно транспортный поток относят к одной из трех групп: смешанный поток (30-70% легковых автомобилей, 70-30% грузовых автомобилей), преимущественно грузовой (более 70% грузовых автомобилей), преимущественно легковой (более 70 % легковых автомобилей)
Плотность транспортного потока k (х1, x2, t) определяется числом транспортных средств, приходящихся на 1 км полосы дороги. Единица измерения плотности транспортного потока - авт/км. С увеличением плотности транспортного потока сокращается дистанция между автомобилями, снижается скорость движения, увеличивается напряженность труда водителя, ухудшаются условия движения. Максимальная плотность транспортного потока достигается в заторовых ситуациях. Численные значения максимальной плотности определяются составом потока. Для смешанного состава транспортного потока она составляет около 100 авт/км, для преимущественно легковых автомобилей - до 150 авт/км.
Основные трудности использования информации о плотности транспортного потока связаны со сложностью непосредственного измерения этого параметра дорожного движения.
В организации дорожного движения в зависимости от методов измерения и расчета сложилась определенная терминология при характеристике скорости.
Временная (мгновенная) скорость - скорость транспортного средства в каком-либо сечении дороги. Измерение мгновенной скорости не представляет трудностей, т к. при этом используются разнообразные средства измерений: секундомер, фиксирующий прохождение мерного участка; видеокамера; радар; транспортный детектор. Кроме того, для получения достоверных результатов можно замерить скорости множества автомобилей в транспортном потоке. Поэтому мгновенная скорость наиболее широко применяется в практической деятельности по организации дорожного движения.
Пространственная скорость оценивает изменение скоростного режима по длине магистрали. Наиболее полно характеризует условия движения на улично-дорожной сети. Однако подобную информацию можно получить только в процессе непрерывной записи скорости с использованием дорожно - исследовательской лаборатории. Достоверность результатов измерений обеспечивается многократным проездом по исследуемой магистрали.
Скорость движения оценивается только с учетом времени движения автомобиля по улично-дорожной сети.
Скорость сообщения определяется с учетом задержек при движении.
На основе данных о скорости транспортного потока можно определить такой удельный показатель, как темп движения - величину, обратную скорости сообщения. Темп движения оценивает время прохождения единицы длины маршрута и предоставляет наглядную информацию об условиях организации движения и перевозок.
В общем виде соотношение между интенсивностью, плотностью и скоростью описывается основным уравнением транспортного потока:
![]()
где q- интенсивность движения, k - плотность транспортного потока, v - скорость транспортного потока.
Соответствующие графики приведены на рис. 6.7.
График зависимости между интенсивностью и плотностью обычно называют основной диаграммой транспортного потока. На этом графике прослеживаются основные закономерности изменения состояния транспортного потока. Первая граничная точка соответствует нулевой интенсивности и плотности и характеризует свободные условия движения. Первоначально увеличение плотности вызывает возрастание интенсивности движения, и этот процесс продолжается до достижения пропускной способности дороги. Дальнейшее увеличение плотности приводит к значительному ухудшению условий движения, возникновению заторовых ситуаций, снижению интенсивности движения. Вторая граничная точка соответствует полной остановке движения при максимальной плотности и нулевой интенсивности.
Рис. 6.7. Зависимости между интенсивностью,
плотностью и скоростью.
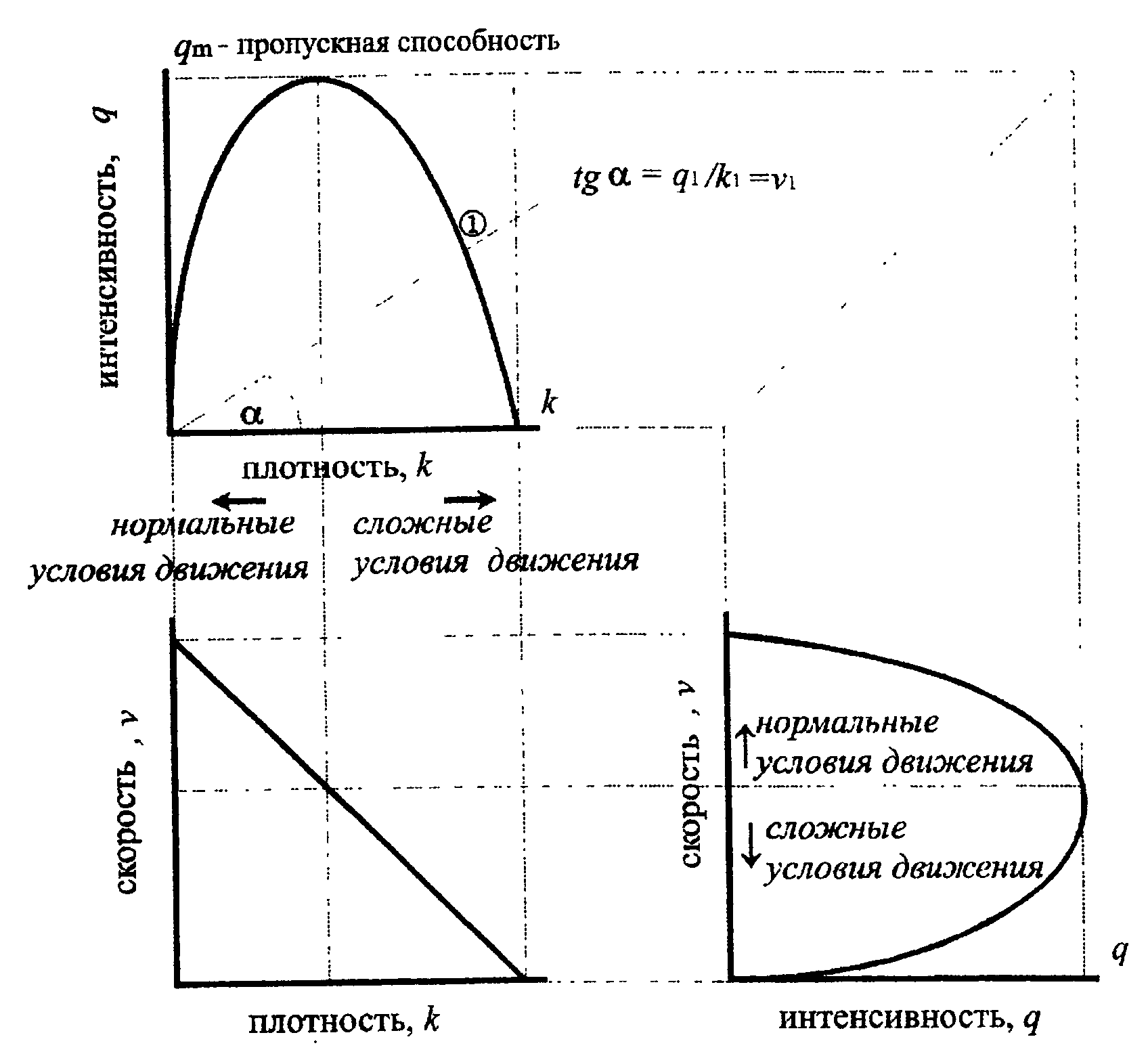
Исходя из основного уравнения транспортного потока, тангенс угла наклона радиус-вектора, проведенного из начала координат основной диаграммы к какой-либо точке графика (в данном случае точка 1), показывает скорость движения при данной интенсивности и плотности.
Задержки движения характеризуются потерей времени при прохождении транспортным средством заданного участка [l1, 12] со скоростью сообщения ниже оптимальной:
![]()
где vф;vо - соответственно фактическая и оптимальная скорости сообщения.
Оптимальной скоростью в данном случае следует считать скорость сообщения, обеспечивающую минимум потерь времени, топлива, расходов, связанных с износом автомобиля, потерь от ДТП и т. д. Ввиду трудности определения истинного значения оптимальной скорости в практике организации движения условно в качестве оптимальной принимают разрешенную (расчетную по условию безопасности) скорость на данном участке дороги.
Потери времени транспортного потока
![]()
где q - суммарная интенсивность движения.
Различают задержки на перегонах и пересечениях. Задержки на перегонах являются результатом маневрирования, наличия в потоке автомобилей, движущихся с малыми скоростями, движения пешеходов, остановок и стоянок транспортных средств, перенасыщенности потока. Задержки на пересечениях являются результатом необходимости пропуска транспортных и пешеходных потоков по пересекающимся направлениям.
В совокупности все эти зависимости позволяют прогнозировать изменение состояния транспортного потока и пропускной способности при планировании мероприятий по совершенствованию организации дорожного движения и развитию улично-дорожной сети
Из кн. Коноплянко В. И., Гуджоян О. П., Зырянов В. В., Березин А. С. «Безопасность движения». Учебное пособие. Кемерово 1998 г.
6. 1. КЛАССИФИКАЦИЯ ТЕХНИЧЕСКИХ СРЕДСТВ ОДД
Технические средства организации дорожного движения (ТСОДД) предназначены для регулирования движения транспортных и пешеходных потоков. Регулирование (от латинского regula - норма, правило) ДД – это поддержание на определенном уровне показателей пешеходных и транспортных потоков, с целью обеспечения эффективности и безопасности дорожного движения.
По назначению ТС делятся на:
- средства информирования участников движения (светофоры, дорожные знаки и указатели, дорожная разметка, направляющие устройства);
- устройства, обеспечивающие нормальное функционирование средств информации (контролеры, детекторы, устройства обработки и передачи информации, средства диспетчерской связи, ЭВМ и т. д.);
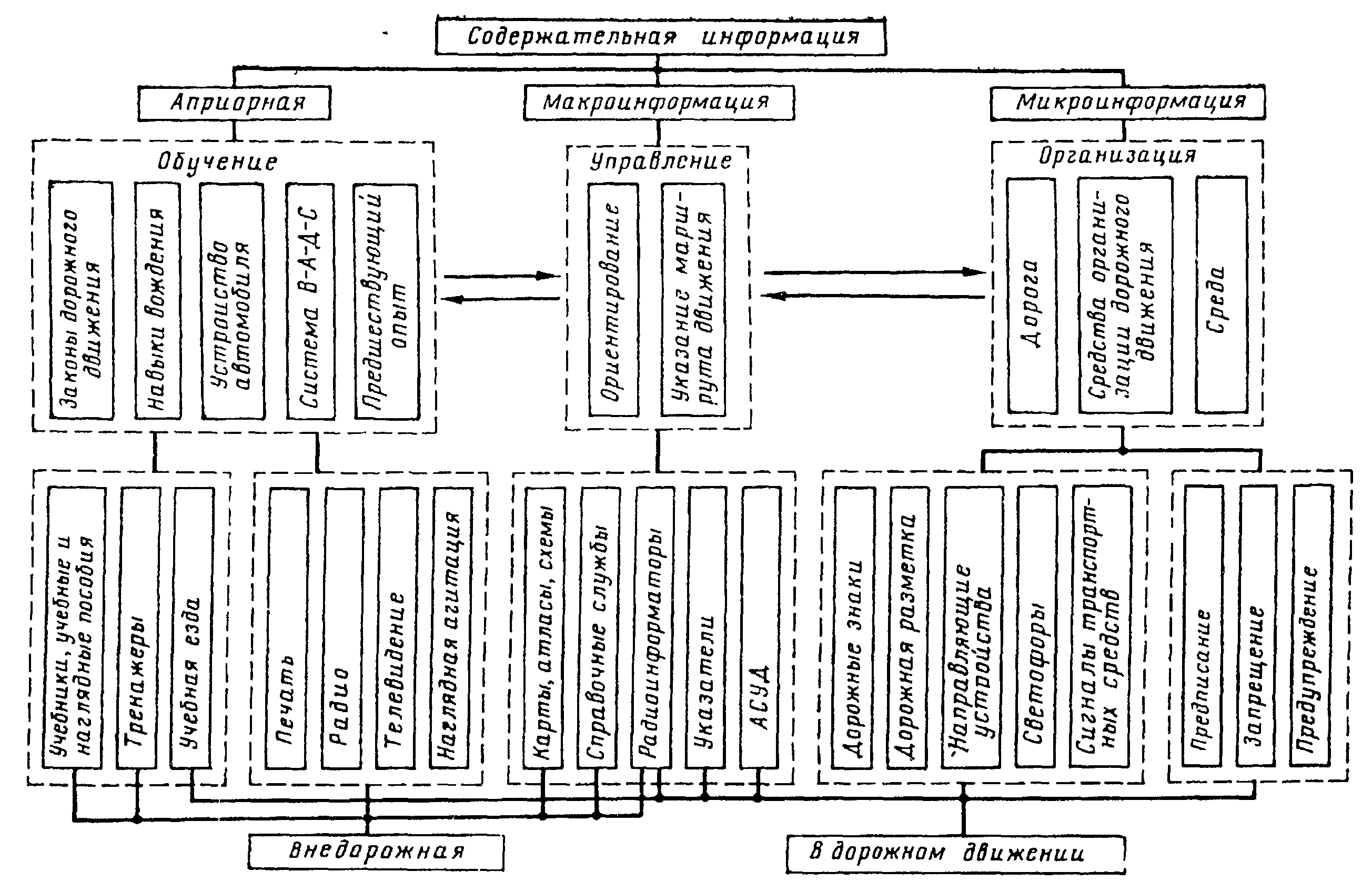
Рассматривая средства информирования с позиций основного ее пользователя - водителя, можно условно разделить их по формированию знаний и месту получения.
С позиций формирования знаний информация может быть классифицирована следующим образом (рис 6. 1):
- априорная (опытная) профессиональная информация, формирующая знания законов дорожного движения, навыки по управлению транспортным средством и т. п. Ее формирование происходит в процессе обучения и всего последующего профессионального опыта;
- макроинформация, формирующая знания о направлении движения для достижения цели поездки,
- микроинформация, формирующая знания о выборе водителем оперативного режима движения.
По месту получения информация может быть при дорожном и внедорожном движении (см. рис. 6. 1).
Роль внедорожной информации в эффективности и безопасности движения заключается, прежде всего, в создании и повышении уровня априорной информации.
Макроинформация. Узким местом в ОДД в настоящее время является низкое информационное обеспечение участников дорожного движения средствами управления и организации дорожного движения.
Макроинформация формирует знания водителей о направлении движения. Недостаток или полное отсутствие такого вида информации приводит к ряду негативных последствий.
По зарубежным данным, в Великобритании из-за неудовлетворительного размещения дорожных знаков, недостатков дорожного освещения и прочего происходит 28% всех ДТП, перепробег автомобилей, вызванных ошибками водителей при выборе направления движения, составляет 4 - 6, 5% от общего пробега, дополнительные затраты топлива при этом составляют около 1100 млн. литров в год. По предварительным экономическим оценкам разрабатываемая система информирования водителей (ориентирование, сведения о метеорологических условиях, опасных зонах по ходу движения и т. д.) в Великобритании сэкономит около 2 млрд. ф. ст. в год. Таким образом, проблема совершенствования информационного обеспечения дорожного движения представляется актуальной и ее решение позволит существенно снизить суммарные потери автомобильного транспорта.
Макроинформацию, являющуюся управляющей по своей природе, можно разделить на два вида: ориентирование и указание. Появившиеся в последнее время автомобильные навигационные системы относятся к классу информирующих и ориентирующих систем, представляющих собой автоматизированные персональные системы, помогающие конкретным водителям в выборе наиболее оптимального маршрута. Заполнение западного рынка такими системами идет довольно высокими темпами и ожидается, что к 2000 г. уже на 10 млн. автомобилей будут установлены такие навигационные системы.
Прогресс в радиоэлектронике, вычислительной технике и информатике обеспечил достаточно широкое развитие информационно-навигационных систем на автомобильном транспорте. Автомобильные навигационные системы, позаимствовавшие свое название из морской и авиационной терминологии, можно отнести к следующему поколению автоматизированных систем управления движением (АСУД). Их применение позволяет снизить время и стоимость поездки и, кроме того, дает возможность водителю оперативно корректировать свой маршрут.
Подобные системы построены по следующему логическому алгоритму:
1) определение пространственной координаты данного ТС на дорожной сети в данный момент времени;
2) определение маршрута движения ТС от места нахождения до места назначения и доведение этого маршрута до водителя;
3) обеспечение пользователя, находящегося в ТС, возможностью передачи и приема информации с отображением на дисплее (или в другом виде).
Использование навигационных систем должно рассматриваться как ресурсосберегающий фактор на автомобильном транспорте. Эффективность применения таких систем состоит в минимизации прежде всего времени поездки, экономии топлива, снижении уровня загрязнения окружающей среды, амортизационных расходов и уменьшении психофизиологического напряжения водителей.. Распространение автомобильной навигации в массовом масштабе позволит обеспечить оптимальное распределение транспортных потоков по улично-дорожной сети и повысить безопасность движения.
При постоянно возрастающей интенсивности дорожного движения и выпуске моделей автомобилей со все более нарастающими динамическими характеристиками возникает проблема совершенствования систем обеспечения безопасности и снижения экономических потерь дорожного движения Один из возможных путей решения этой проблемы состоит в совершенствовании системы дорожной информации.
В последние годы за рубежом наметилась тенденция к введению в систему информации дорожного движения элементов, предназначенных для передачи участникам дорожного движения сведений, необходимых при планировании и выборе маршрута следования. Иными словами, информации, обеспечивающей ориентирование участников движения.
Водители сейчас имеют широкий доступ к различным источникам информации, которые помогают им достичь пункта назначения кратчайшим и безопаснейшим путем. Диапазон этих средств достаточно велик - от печатных материалов, таких как карты, до сводок о дорожной обстановке, передаваемых по радио. Сюда же относятся и дорожные указатели направлений движения.
До сих пор такие средства помощи большей частью служили лишь дополнительными удобствами для водителей, т. к. было возможно в большинстве случаев добраться до пункта назначения, не прибегая к их помощи. Однако сегодня эта ситуация постоянно меняется в связи с возрастанием числа транспортных средств и увеличением плотности движения. В силу ряда причин, таких как необходимость экономии горючего и времени, информация о дорожной обстановке становится все более актуальной.
Целевой функцией дорожного движения является быстрое, экономичное и безопасное перемещение грузов и пассажиров. Реализация целевой функции возможна при наличии маршрута, соединяющего начальный и конечный пункты поездки. Возможность выбора альтернативных маршрутов подразумевает решение оптимизационной задачи с целью выбора оптимального по заданному критерию маршрута, но недостаточно только рассчитать маршрут, необходимо еще и обеспечить условия его соблюдения, т. к. положительный эффект может быть достигнут только в случае обеспечения движения транспортных средств именно по этим оптимально вычисленным маршрутам. Таким образом, задача указания маршрута движения является логическим завершением поставленной задачи оптимизации.
Отклонение от оптимального маршрута неизбежно приводит к непроизводительным затратам. Зарубежные эксперименты показали, что время, затраченное на передвижение от исходного пункта к заданному при имеющемся информационном обеспечении дорожного движения, может превышать оптимальное более чем в 2 раза, при этом расход топлива на 35%, а пробег автомобилей на 30% и более превышают оптимальное значение (при идеальном маршруте).Причем вероятность отклонения от маршрута увеличивается, если водитель следует по такому пути впервые. В связи с этим, наряду с другими актуальными задачами организации дорожного движения необходимо рассматривать задачу создания системы ориентирования водителей, находящихся на незнакомых маршрутах.
Задачи организации дорожного движения на сегодняшний день усложнились настолько, что эффективное управление им невозможно обеспечить только традиционными элементами системы информации дорожного движения - дорожными знаками и указателями, дорожной разметкой, светофорами и направляющими устройствами. Сказывается, с одной стороны, ограниченность возможности водителя по восприятию дорожной информации ввиду так называемого "дефицита времени", в условиях которого постоянно находится человек, управляющий транспортным средством. С другой стороны, сказываются лимитированные возможности средств информации по видам и, главное, оперативности передаваемой информации.
В условиях усложнения улично-дорожных сетей городов и накладываемой на эти сети системы организации движения для водителя все более необходимой становится возможность получения информации стратегического характера, на основе которой он может оценить и спрогнозировать обстановку на предстоящем пути следования. В этой связи также актуальной становится цель разработки принципов организации системы маршрутного ориентирования и информирования водителей, помогающей им в выборе наиболее оптимального маршрута. Такие системы относятся к классу навигационных систем Их основная цель - минимизация времени и стоимости поездки.
Рис. 6. 1. Классификация
средств информации
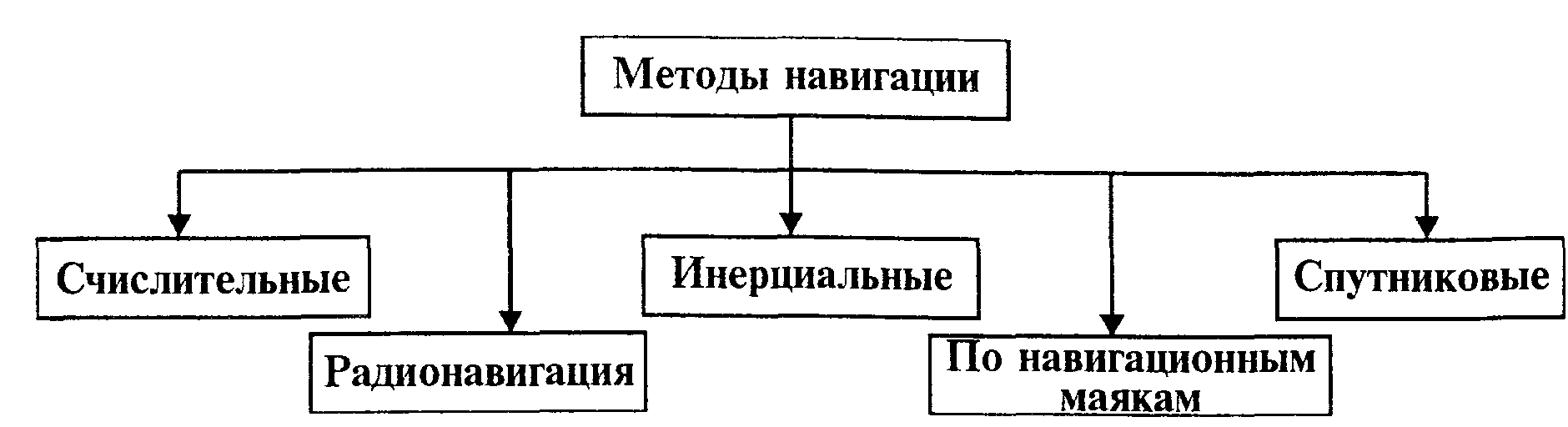
В настоящее время предпринимаются успешные попытки применения различных методов навигации для использования на автомобильном транспорте. К таким методам относятся:
счислительные (автономные);
радиогониометрические;
инерциальные;
с использованием навигационных маяков;
гиперболические;
разностно-дальномерные.
Последние два метода относятся к спутниковой навигации, в отличие от радиолокационных методов, использующих радиостанции наземного базирования. Классификация методов навигации представлена в виде схемы (рис. 6.2).
Каждый из этих методов имеет свои особенности, вытекающие из сути самих методов.
Рис. 6. 2. Классификация
методов навигации
Радионавигация определяет местоположение транспортного средства по разности расстояний от него до двух пар синхронно работающих наземных радиостанций. Точность системы определяется вероятностью затухания и отражения радиоволн в пространстве и возможными помехами.
Инерциальная навигация основана на использовании гироскопов и акселерометров. Такие системы не просты в обслуживании из-за необходимости поддержания необходимой частоты вращения гироскопов.
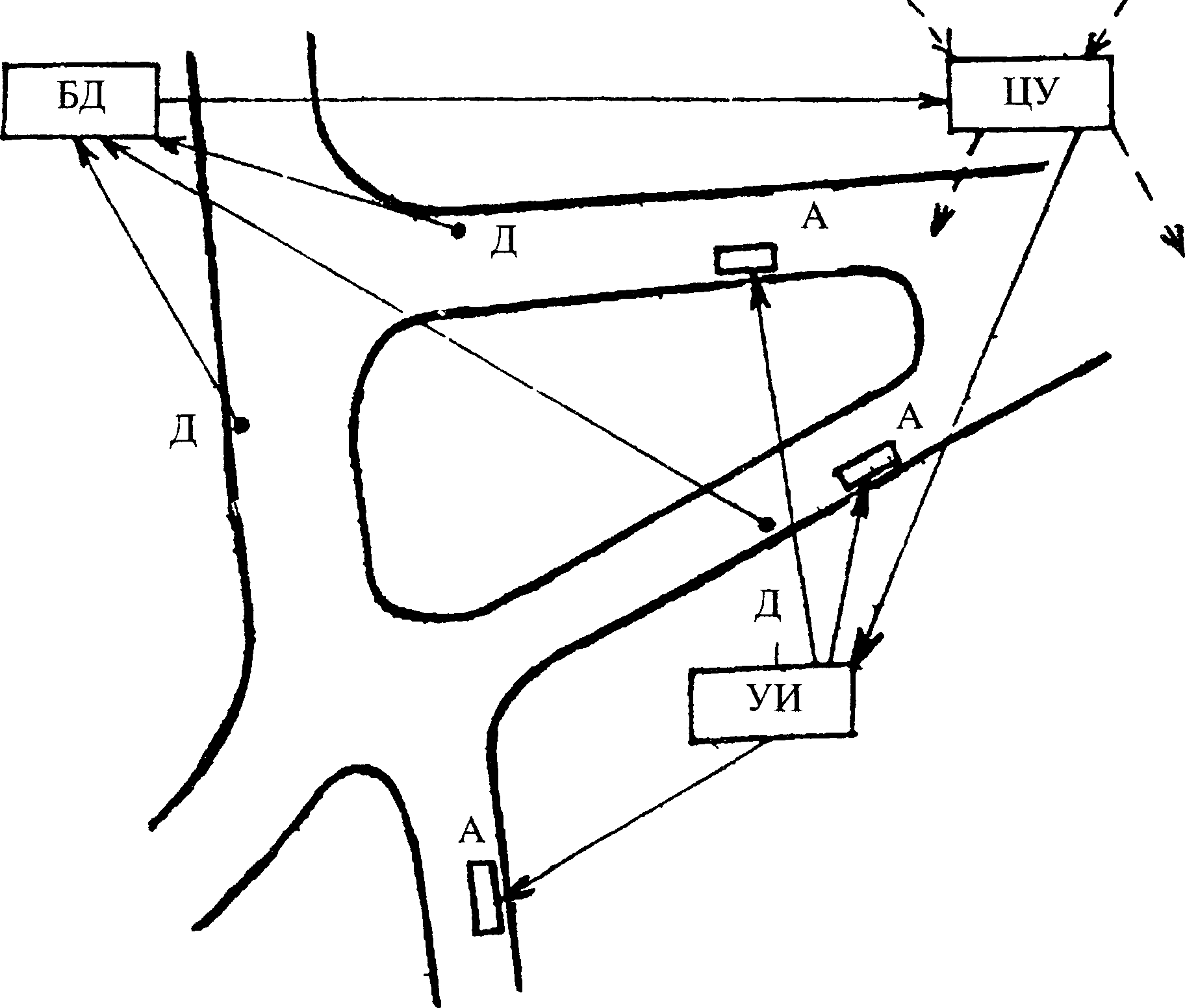
Рис. 6.
3. Схема
передачи управляющей информации
водителю: Д - датчики данных об условиях
дорожного движения; БД - сбор данных об
условиях движения; ЦУ - центр управления;
УИ - управляющая информация, вырабатываемая;
ЦУ, А – автомобили.
Спутниковая навигация, являющаяся разновидностью радионавигации, отличается теми же недостатками, что и система навигационных маяков (отсутствие непрерывности слежения при отсутствии контакта со спутником), но позволяет охватывать большие территории (в принципе - весь земной шар) и характеризуется постоянством точности определения местоположения транспортного средства на всем маршруте.
Необходимо отметить, что в настоящее время происходит слияние разных методов навигации для создания систем ориентирования, компенсирующих недостатки каждого метода. Тем самым обеспечивается возможность работы системы в различных условиях.
Основными элементами любой навигационной системы являются датчики навигационной информации, навигационный вычислитель и средства отображения и предоставления полученной информации. Все навигационные системы имеют сходную структуру управления, которую можно описать в виде так называемой "петли управления".
Данные об условиях дорожного движения собираются датчика ми, расположенными вдоль дорог, и обрабатываются в центре управления, который рассчитывает путь проезда автомобиля и передает управляющую информацию водителю. Эта информация различными способами передается на приборы, расположенные в автомобиле. Такая схема управления представлена на рис. 6. 3.
Таким образом, получается замкнутая система управления, состоящая из управляемой системы (автомобиля, а точнее, водителя), управляющей системы (центра управления) и цепей управления (каналов связи или воздействия одной системы на другую). В зависимости от уровня сложности системы некоторые элементы могут не входить в ее состав.
Навигационные системы включают в себя системы коллективного и персонального действия. Коллективное действие означает, что одни и те же сообщения получают все водители, независимо от потребности их в этой информации. Системы же индивидуального действия обеспечивают водителю передачу только тех сообщений, которые он запрашивает.
Техническая реализация этих систем основывается на самых разных принципах механических, электронных, космической связи и т. д.
В соответствии с существующими методами навигации на сегодняшний день можно дать следующую классификацию автомобильных навигационных систем по наличию линий связи автономные системы, системы с односторонней связью, системы с двусторонней связью между бортовым навигационным комплексом автомобиля и центром управления По типу используемых в каждой системе данных их можно разделить на два класса Первый класс - системы, работающие на основе фиксированных (постоянных) данных о дорожной сети, условиях движения и т. д. - класс статических систем Второй класс - системы, располагающие периодически изменяющимися данными, - класс динамических систем.
К автономным системам можно отнести маршрутные компьютеры и системы, использующие счислительный метод навигации В системах с односторонней связью можно выделить два подкласса, обусловленных историческим развитием этой разновидности систем информирования водителей - радиомаяки и радиоинформаторы К этому типу систем относятся также системы диспетчерской связи на городском пассажирском транспорте И, наконец, системы с двусторонней связью представляют собой наиболее сложную систему указания маршрутов движения, использующую стационарные вычислительные центры
Классификацию систем информирования и навигации водите лей можно представить в виде табл. 6. 1. Функции систем разных классов представлены в табл. 6 2
Таблица 7.1.
Классификация навигационных систем по типу используемых данных
|
Статическая |
Фиксированные |
Наличие каналов связи | ||
|
автономные |
односторонние |
двусторонние | ||
|
Маршрутные компьютеры |
Радиомаяки |
| ||
|
Динамическая |
Переменные |
|
Радиоинформаторы |
Системы указания маршрутов |
Таблица 7. 2