

4.2. Расчет параметров и выбор элементов силовой цепи
Для силовой цепи необходимо вычислить ёмкость С-фильтра (рис.4.1.).
Ток протекающий по силовой цепи описывается уравнением:
![]()
Отклонение напряжения в цепи постоянного тока от заданного не должно превышать 5%:
![]() B.
B.
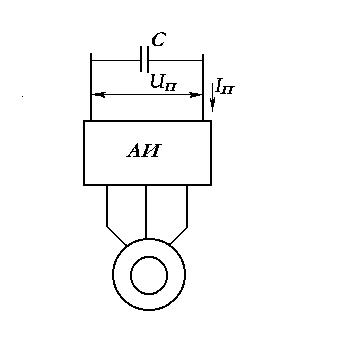
Рис.4.1. силовая цепь.
Ток вычисляется по формуле:
![]() (4.1),
(4.1),
где U1H=220B; I1H=17,27A; cosφ=0,88
Подставляя значения в формулу(4. 1), получим
![]()
Ёмкость вычисляем по формуле:
![]() , (4.2)
, (4.2)
![]() с.
с.
Подставляя значения в формул (4.2), получим:
![]() мкФ
мкФ
5. Проектирование системы автоматического управления.
5.1. Разработка математической модели автоматизированного электропривода
В основу математической модели положена структурная схема автоматического регулирования скорости представленная в «Теории электропривода» В. И. Ключева в параграфе 7.5.
Структурная схема автоматического регулирования скорости
Р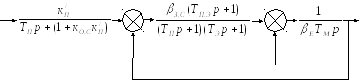 ис.5.1
ис.5.1
Тп,э=Тп/Ку.ж.., Тп― машинная постоянная,
учитывающая дискретность, запаздывание
и наличие фильтров в системе фазового
импульсного управления, Тп<0,01 с, Ку.ж..―
коэффициент увеличения модуля жесткости
в замкнутой системе βЗ.С.по
сравнению с βЕ, βЗ.С.=βЕ(1+кО.С![]() )=βЕкУ.Ж.,
βЕ―жесткость механической
характеристики, βЕ=2МК/ω0НОМsK,
Тэ― электромагнитная постоянная
двигателя, Тэ=1/ω0ЭЛ,НОМsK,
Тм― механическая постоянная электропривода,
Тм=Jω0/МК, Кп―
коэфициент усиления преобразователя,
Кп=Еп/U,
)=βЕкУ.Ж.,
βЕ―жесткость механической
характеристики, βЕ=2МК/ω0НОМsK,
Тэ― электромагнитная постоянная
двигателя, Тэ=1/ω0ЭЛ,НОМsK,
Тм― механическая постоянная электропривода,
Тм=Jω0/МК, Кп―
коэфициент усиления преобразователя,
Кп=Еп/U,![]() .
.
5.2.Расчет параметров объекта управления
Исходя из выражений и данных двигателя, получаем:
Мном.= Рном./0 ном.,
где 0 ном. – скорость двигателя, определяемая как:
0 ном. = n / 30,
0 ном. = 3,143000 / 30 =314,16с-1;
Mном. = 7500 / 314,16 = 23,87 Нм;
Номинальная скорость двигателя определяется по формуле:
ном. = nном.(1-Sном.) / 30,
ном. = 3,143000(1-0,035) / 30 = 303с-1;
тогда max =ном. =303 с-1 – максимальная скорость двигателя;
min = max / D = 303/4 = 75,1 с-1;
Определим время пуска двигателя:
tn = Jном. / Мп-Мс;
где Мп = 2Мном. =223,87=47,74 Нм – пусковой момент;
J = 2Jдв =20,0075=0,015– суммарный момент инерции системы;
tп = 0,015306/47,74-23,83=0,193с;
Для расчета параметров структурной схемы необходимо произвести расчеты параметров Т-образной схемы замещения АД:
R1 = 0,685Ом;
R2 = 0,417Ом;
Rm = 14,9Ом;
L1 = 0,178Гн; L2 = 0,182Гн; L12 = 0,175Гн;
х1= 0,864Ом; х2= 2,086Ом; хm= 55,15Ом
Здесь
![]() ―
эквивалентная постоянная времени
статора;
―
эквивалентная постоянная времени
статора;
![]() ― эквивалентное сопротивление цепи
статора;
― эквивалентное сопротивление цепи
статора;
![]() ― эквивалентная индуктивность цепи
статора;
― эквивалентная индуктивность цепи
статора;
Lэ= 0,178 – 0,1752/0,182 = 0,0097Гн;
Rэ= 0,685 + 0,417(0,1752/0,1822) = 1,07Ом;
Тэ= 0,0097/1,0705 = 0,009с.
Тм= 3140,015/23,872,2=0,09с.
5.3.Определение параметров и структуры управляющего устройства
Для управления насоса производители преобразователей, в том числе АВВ, предлагают использовать ПИД-регулирование. Параметры ПИД-регулира зависят от состояния водопроводной системы, которая не вычисляется, поэтому ПИД-регулятор программируется приблизительно и настраиваеттся в процессе наладки. Согласно литературе водопроводную сеть можно представить как апериодическое звено с большой постоянной времени. Одновременно система насос-сеть реализует зависимость Н~(ω/ωНОМ)2.
6. Анализ динамических и статических характеристик электропривода
6.1. Разработка имитационной модели электропривода
Н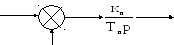 а
основании математической модели
разрабатываем имитационную модель в
пакетеMATLAB. К схеме
моделирования системы ПЧ-АД, с входным
сигналом задания скорости, данной в
“Теории электропривода” В.И.Ключева,
добавим регулятор давления в виде
интегрирующего звена, на вход которого
поступает разность сигналов задания и
обратной связи по давлению, а на выходе
задание скорости:
а
основании математической модели
разрабатываем имитационную модель в
пакетеMATLAB. К схеме
моделирования системы ПЧ-АД, с входным
сигналом задания скорости, данной в
“Теории электропривода” В.И.Ключева,
добавим регулятор давления в виде
интегрирующего звена, на вход которого
поступает разность сигналов задания и
обратной связи по давлению, а на выходе
задание скорости:
Реализация обратной связи по давлению(напору)
Рис.6.1
К выходу системы добавляем модель насоса
реализующую преобразование сигнала
скорости в сигнал напора
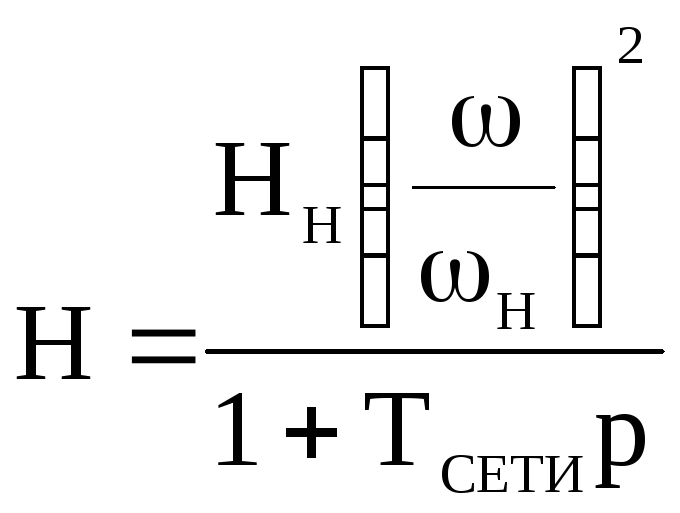 , где ТСЕТИ―постоянная времени
сети, т.е. время за которое сеть изменяет
свои параметры, из-за протяженности и
наличия воздушных карманов оно достаточно
велико, измеряется в десятках секунд,
по сравнению с ним время переходных
процессов в преобразователе частоты и
электродвигателе являются малыми
величинами, которые не влияют на качество
регулирования.
, где ТСЕТИ―постоянная времени
сети, т.е. время за которое сеть изменяет
свои параметры, из-за протяженности и
наличия воздушных карманов оно достаточно
велико, измеряется в десятках секунд,
по сравнению с ним время переходных
процессов в преобразователе частоты и
электродвигателе являются малыми
величинами, которые не влияют на качество
регулирования.
Так как необходимо учесть изменение
статического напора сети, а следовательно
и момента в зависимости от скорости,
вводим обратную связь по моменту
реализующую зависимость
![]() ,
где к― коэффициент аппроксимации,
,
где к― коэффициент аппроксимации, .
С достаточной точностью можно принять
к=2,05. Полученная таким путем зависимость
М(n) является аппроксимацией
графика на рис.3.1. Для данного привода
ωCT.MAX=1,2ωHOM=376,8
рад/с, а условием эксплуатации насоса
является ωCT.MIN=0,9ωНОМ=282,6
рад/с.
.
С достаточной точностью можно принять
к=2,05. Полученная таким путем зависимость
М(n) является аппроксимацией
графика на рис.3.1. Для данного привода
ωCT.MAX=1,2ωHOM=376,8
рад/с, а условием эксплуатации насоса
является ωCT.MIN=0,9ωНОМ=282,6
рад/с.