

Кинематическая схема электропривода
Р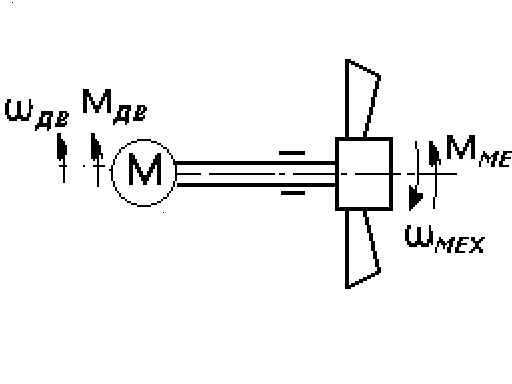 ис.1.3
ис.1.3
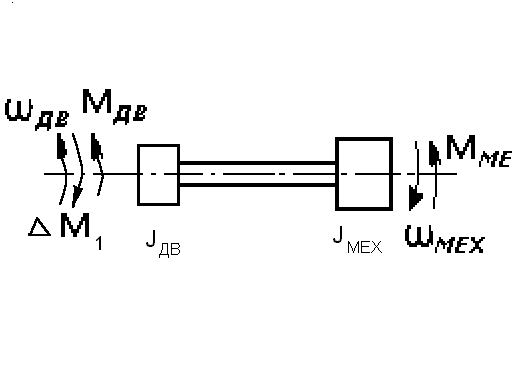
Для анализа механической части электропривода реальный механизм заменяют динамически эквивалентной, приведенной расчетной схемой, состоящей из дискретных (сосредоточенных) инерционных элементов, соединенных между собой упругими связями, и обладающей таким же энергетическим запасом, как и реальная система. Здесь под дискретным инерционным элементом понимается тело, обладающее свойствами инерции, податливостью которого можно пренебречь. Под упругой связью понимается упругое звено, массой которого можно пренебречь. В приведенной расчетной схеме все инерционные элементы осуществляют один вид движения – вращательные. При этом они располагаются на какой-нибудь одной упругой связи. Расчетные параметры можно приводить к любому заранее выбранному месту кинематической схемы механизма, к любому упругому ее элементу. Если приведение производится к какому-нибудь валу механизма, то получается расчетная приведенная схема вращательной системы (рис.1.4), в которой все массы имеют общую геометрическую ось. В такой системе нагрузки характеризуются крутящими моментами М, инерционные моменты – моментами инерции J, упругие элементы – коэффициентами жесткости при кручении (крутильной жесткостью) Скр.
Расчетная приведенная схема вращательной системы
 Рис
1.4.
Рис
1.4.
Суммарный момент инерции электропривода определяется как:
![]() .
.
Момент инерции двигателя дан в каталоге, а насоса трудно вычислить по формулам использующим геометрические параметры, принимаем его как 2JДВ.
2. Выбор систем электропривода и автоматизации промышленной установки
2.1. Литературный обзор по теме дипломного проекта
Развитие полупроводниковой преобразовательной техники привело к широкому использованию электроприводов с электродвигателями переменного тока и к созданию новых систем управления этими электродвигателями. По сравнению с системами управления электроприводами постоянного тока систему управления электроприводами переменного тока значительно более разнообразны. В регулируемых электроприводах используются асинхронные электродвигатели с короткозамкнутым или фазным ротором, синхронные или вентильные электродвигатели. Применяются различные способы регулирования скорости электродвигателя путем изменения: напряжения статора, частоты и напряжения статора, частоты и напряжения ротора, добавочного сопротивления в цепи ротора и др. Используется значительно большее число регулируемых координат, чем в электроприводах постоянного тока. Вместе с тем имеются определенные ограничения в использовании того или иного способа управления и созданной на основе этого способа системе управления электродвигателем. Все эти обстоятельства затрудняют формирование общих подходов к синтезу автоматических систем управления электроприводом (АСУ ЭП) переменного тока в такой степени, как это было сделано в АСУ ЭП постоянного тока.
Управление электродвигателями переменного тока осложнено рядом обстоятельств, наиболее существенными из которых являются следующие:
момент электродвигателя определяется произведением двух результирующих векторов электромагнитных параметров статора и ротора и является функцией четырех переменных;
имеется сильное взаимодействие намагничивающих сил статора и ротора, взаимное состояние которых непрерывно меняется при вращении ротора;
с целью лучшего использования двигателя в различных режимах его работы возникает задача регулирования магнитного потока двигателя.
Электродвигатели переменного тока совместно с управляемыми преобразователями представляют собой сложные многосвязные нелинейные объекты управления. Полное математическое описание таких объектов оказывается довольно громоздким и неприемлемым для инженерных методов синтеза систем управления. Вместе с тем в практике построения систем электроприводов, включая и АСУ ЭП переменного тока, получили распространение простые приемы синтеза систем управления, основанные на принципах подчиненного управления и на использовании унифицированных настроек контуров регулирования, входящих в систему управления. Использование этих приемов позволяет не только просто выполнить синтез систем управления, но и создает обоснованную возможность упрощения математического описания электроприводов переменного тока, в частности возможность пренебрежения взаимосвязью ряда координат и параметров электроприводов.
Основная сложность при создании АСУ ЭП переменного тока заключается в создании независимого управления электромагнитным моментом и потоком двигателя. Если это удается выполнить, то АСУ ЭП переменного тока с обратными связями по скорости или по положению выполняются точно так же, как и АСУ ЭП постоянного тока, включая и способы управления пусковыми и тормозными режимами.
При синтезе взаимосвязанных систем управления используются два основных приема, обеспечивающих автономность (независимость) контуров регулирования:
использование различного рода дополнительных компенсационных связей между локальными контурами регулирования;
разделение локальных контуров регулирования по быстродействию.
Оба этих приема используются при выполнении АСУ ЭП переменного тока, и это дает основание уже на стадии формировании математической модели электропривода делать ряд упрощений.
Частотное регулирование скорости асинхронного электропривода осуществляется изменением частоты и напряжения, питающего двигатель. При рассмотрении систем управления, обеспечивающих стабилизацию потокосцеплений двигателя, структура системы управления выполняется замкнутой по внутреннему напряжению двигателя при задании, пропорциональном выходной частоте, с воздействием на регулятор выходного напряжения преобразователя частоты. Самым простым случаем является изменение амплитуды напряжения пропорционально частоте. Это наиболее распространенный случай частотного управления, который характеризуется следующими особенностями:
преобразователь частоты является источником напряжения;
амплитуда напряжения регулируется пропорционально частоте.
При частотном управлении скольжение двигателя и потребляемый ток устанавливают в соответствии с моментом, развиваемым двигателем. Момент двигателя не формируется специальным регулятором.
Данный тип привода имеет следующие недостатки:
низкое качество регулирования скорости как при управляющем воздействии (изменение частоты), так и при возмущающем воздействии (изменение нагрузочного момента);
отсутствие режима работы на “упор”. В рассматриваемых приводах при чрезмерных нагрузочных моментах привод отключается под действием защиты;
в рамках частотного регулирования трудно реализовать варианты специального управления, когда величина потокосцепления меняется в функции момента двигателя. При этом напряжение должно регулироваться в функции частоты и момента.
Можно упростить решение последней задачи, если осуществлять управление амплитудой тока статора, а не напряжения. Амплитуда тока статора определяется моментом (скольжением) двигателя и не зависит от частоты. Чтобы непосредственно воспроизводить заданную амплитуду тока, преобразователь частоты должен обладать свойствами источника переменного тока. Таким образом, приходим к варианту частотно-токового управления, который в наиболее типичной форме характеризуется следующими особенностями:
преобразователь частоты является источником переменного тока;
амплитуда переменного тока регулируется в функции частоты скольжения (момента). Зависимость амплитуды переменного тока от частоты скольжения определяется принятым законом управления.
Для частотно токового управления необходим датчик частоты скольжения. В наиболее распространенных исполнениях систем частотно-токового управления датчик скольжения отсутствует, в системе управления преобразователя формируется сигнал скольжения и соответствующий сигнал амплитуды тока в функции задания момента двигателя. Частота получается суммированием двух сигналов, текущего значения скорости и задания скольжения. Скольжение определяется заданием момента двигателя, которым является выходной сигнал регулятора скорости. Такие системы электропривода обладают качественными регулировочными характеристиками, обеспечивают ограничение момента на заданном уровне, независимо от скорости двигателя.
Рассмотрим применение частотного и частотно-токового управления. Частотное управление единственно возможное для многодвигательного привода, в котором может меняться число двигателей, а моменты сопротивления отдельных двигателей различаются. Частотно-токовое управление может использоваться только для однодвигательного привода. Для однодвигательного привода на практике также используется частотное управление, причем для устранения отмеченных недостатков частотного управления вводят в систему управления корректирующие сигналы по току. При этом осуществляется отход от сформулированных особенностей частотного управления.
Следует, однако, отметить определенную условность рассматриваемого деления вариантов исполнения систем управления, потому, что ток всегда определяется напряжением, и тот же закон управления может быть осуществлен с помощью источника напряжения. Система управления по своему составу и функциональным связям определяется, прежде всего, принятым основным законом управления. Лишь в исполнительной части в системе управления учитываются характерные свойства преобразователя частоты: является ли он источником тока или напряжения, а также другие более конкретные особенности.
Использование регулируемого электропривода в турбомеханизмах позволяет выиграть следующих моментах:
Высокий коэффициент мощности (cosφ) помогает снизить затраты на потребляемую электроэнергию.
За счет ликвидации токовых пиков при запуске отпадает необходимость в электрических кабелях большого сечения, в то время как двигатели с прямым подключением к сети питания поглощают ток, в 6-7 раз превышающий номинальное значение. Таким образом, можно избежать опасности поражения большими токами, а так же снизить расходы при установке и прокладке.
Отсутствие техобслуживания: инвертор не требует техобслуживания, так как состоит из статических элементов. При инвертора все проблемы, связанные с передаточным механизмом, серво-регулирующими клапанами, гидравлическими муфтами, сборниками и прочие, устраняются.
Энергосбережение: установки, содержащие насосы отличаются большими энергетическими потерями, которые могут существенно снизить общие показатели системы.
В самом деле, регулирование традиционно поручается дроссельным клапанам, расположенным ниже по течению, чем сами насосы, функцией которых является уменьшение падения давления в контуре так, чтобы изменять расход жидкости путем изменения характеристики кривой установки, как показано на рисунке, от точки А до точки В.
Знание проблем, связанных с энергосбережением, сделало эти методы управления устаревшими, способствуя введению недиссипативных систем регулирования, которые полностью устраняют падение давления; таким образом достигается максимальный КПД установки.
В самом деле, значительное энергосбережение можно получить если проанализировать выражение для мощность на валу насоса(1.1):
![]()
При установке регулирующего клапана, который по природе своей является рассеивающим элементом, регулирование можно выполнить, воздействуя на скорость насоса и находя характеристическую кривую H-Q, соответствующую конкретному числу оборотов; поэтому поскольку число оборотов меняется, кривая переносится параллельно самой себе.
В настоящее время регулирование обычно производится с помощью датчика напора насоса (Н), который имеет приемлемую начальную стоимость и обеспечивает существенное энергосбережение, но не осуществляет полного управления всей системой.
На рисунке показано, как любое изменение напора Н влияет также на кривую установки (от точки А до точки В); а это происходит, главным образом, из-за падения давления в контуре.
На рисунке возможность управлять и напором насоса Н, и подачей насоса Q позволяет перемещать кривую установки, как и ранее, параллельно номинальной кривой, в то же время поддерживая оригинальную кривую установки ( от точки А до точки В). Получается значительное снижение потребляемой мощности, и работа проходит с оптимальной рабочей мощностью и максимальным КПД.
Это также можно увидеть, если проверить каждую отдельную область, где значения мощности указаны в процентах.
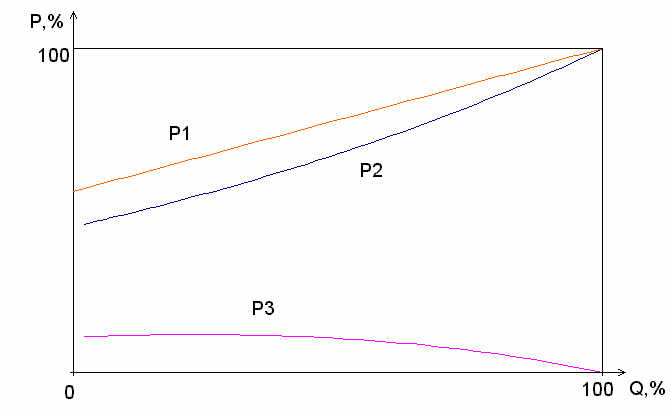 Рис.2.3
Рис.2.3
График, приведенный на рисунке 2.3., показывает наглядно, что сбереженная мощность, полученная за счет использования автоматизированного электропривода зависит, главным образом, от величены средней подачи, которую можно получить от насоса.
Рис.2.3. график зависимости сбережения мощности от расхода Q.
Кривая Р1 показывает мощность, необходимую для системы, когда используются дроссельные клапана или задвижки.
Кривая Р2 показывает мощность, необходимую для системы, когда используется преобразователь частоты.
Кривая Р3 показывает сбереженную мощность при различных уровнях подачи и максимальном КПД установки.