

2.2. Форлулирование требований к автоматизированному электроприводу и системе автоматизации
Основным требованием к автоматизированному электроприводу является стабилизация напора, а для системы автоматизации — в случае отказа преобразователя перейти в режим нерегулируемого насоса или включение резервного насоса при увеличении потребления воды выше возможностей одно насоса или при выведении его из строя.
Так же электроприводу насоса предъявляется следующие требования:
Высокоэффективного перекачивания, при этом устраняется необходимость в регулирующих клапанах, которые неэффективно использовались для снижения расхода воды, и нет нужды недогружать насосы, что происходит при их работе с постоянной скоростью.
Плавного пуска, помогающего избежать пиков давления и вытекающей отсюда нагрузки на выходные трубы. Это снижает риск повреждений и утечки, а также внезапных колебаний давления, которые вызывают вибрацию труб, сопровождаемую звуками, напоминающими стук молотка, называемые обычно "трамбовкой". Интенсивная трамбовка может даже вызвать разрыв труб, в то время как внезапное понижения давления может, наоборот, вызвать вдавливание. Кавитация может также вызвать коррозию трубопровода. Постепенная, а не внезапная остановка насосов к тому же предотвращает одинаково вредные для труб пики давления. Более того, она снижает износ подшипников и редукторов насоса. С помощью настройки длительности разгона и торможения можно оптимизировать процесс запуска и останова.
2.3. Проектирование функциональной схемы автоматизированного электропривода
 Автоматизированный
электропривод насоса со стабилизацией
напора должен иметь регулятор давления,
на вход которого подается разность
сигнала задания и обратной связи по
давлению. Стабилизация напора реализуется
изменением скорости вращения двигателя
с помощью регулятора частоты, на вход
которого поступает разность сигналов
с выхода регулятора давления.
Автоматизированный
электропривод насоса со стабилизацией
напора должен иметь регулятор давления,
на вход которого подается разность
сигнала задания и обратной связи по
давлению. Стабилизация напора реализуется
изменением скорости вращения двигателя
с помощью регулятора частоты, на вход
которого поступает разность сигналов
с выхода регулятора давления.
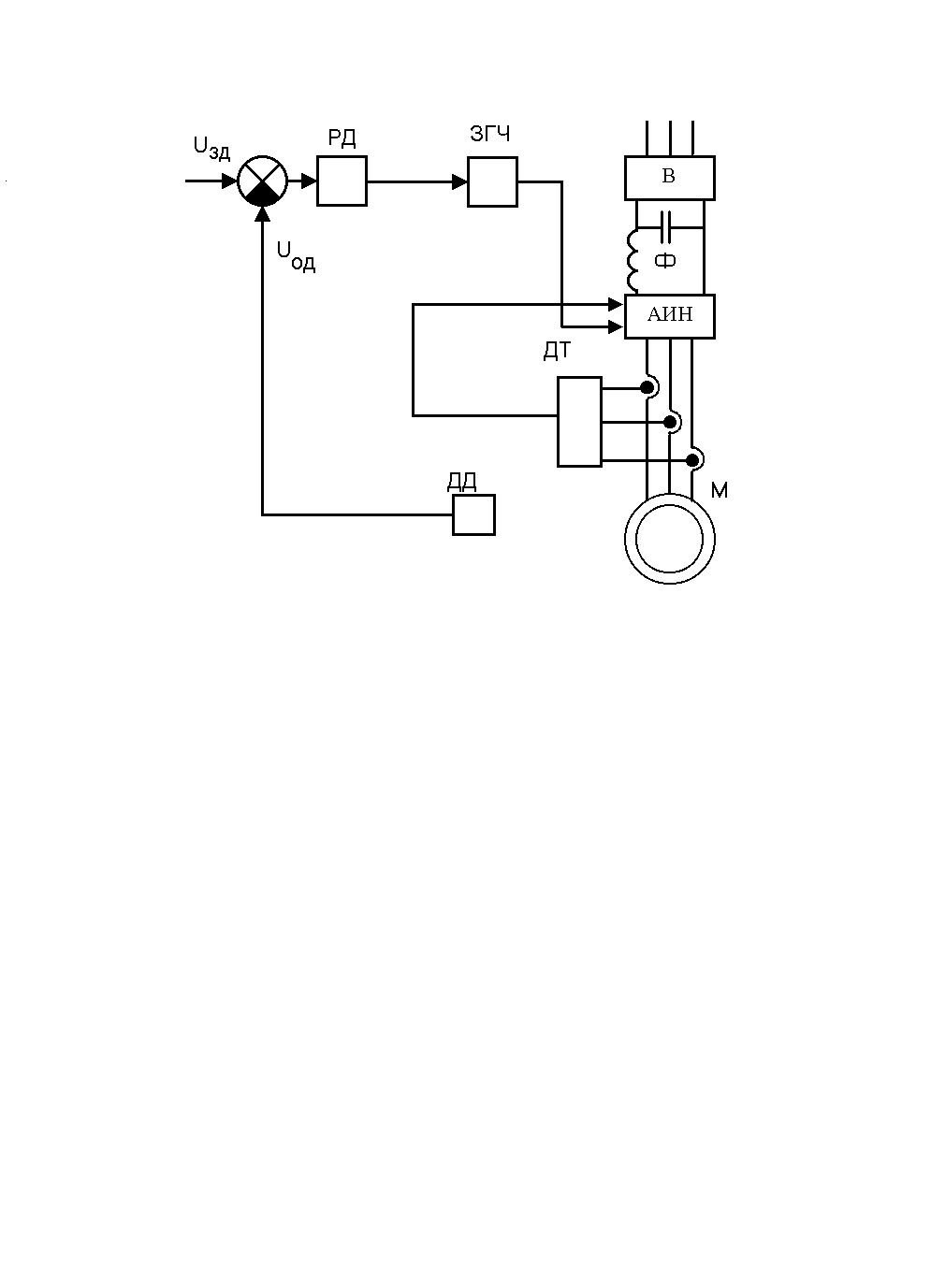
Функциональная схема электропривода
Рис.2.4
Выходной сигнал регулятора частоты является управляющим преобразователя частоты. Полученная схема представлена на рис.2.4., где Uзд― напряжение сигнала задания напора,Uод― напряжение сигнала обратной связи по напору, РД― регулятор давления, ДТ― датчик тока входящий в состав преобразователя, ДД― датчик давления, В― выпрямитель, Ф― фильтр, АИН― автономный инвертор напряжения, М― двигатель, ЗГЧ― задатчик генератора частоты. Преобразователь сам рассчитывает текущее значение скорости вращения и устанавливает необходимую.
2.4. Определение возможных вариантов и выбор рациональной системы электропривода
Выбор системы управления осуществляется на основе анализа сравнительных технических данных, а именно: диапазона регулирования, способа управления, ресурса (уровня износостойкости), диапазона возможных мощностей электроприводов, показатели энергетики и динамики, а также дополнительных данных, определяющих условия эксплуатации электроприводов. Экономическая оценка систем управления должна базироваться на принципе минимальных расходов, связанных с первоначальными затратами, эксплуатационными затратами на ремонт, а также затратами на ремонт, а также затратами энергии. Выбирается система, обладающая наилучшими экономическими показателями. Если экономические показатели сравниваемых систем близки, то производится дополнительная оценка по массогабаритным показателям и условиям размещения электрооборудования. Выбранная система электропривода должен оптимально подходить для условий работы на токарном станке, необходимо рационально использовать ее ресурсы. В настоящее время наибольшее распространение получили системы электроприводов переменного тока, т.к. они дешевле и надежнее электроприводов постоянного тока.
Так как условия технологического процесса не требуют повышения скорости электропривода выше номинальной, можно отказаться от векторного управления, удовлетворившись скалярным с широтно-импульсной модуляцией.