

25.Способы определения координат центров тяжести тел.
1. Аналитический (путем интегрирования).
2 .Метод симметрии. Если тело имеет плоскость, ось или центр симметрии, то его центр тяжести лежит соответственно в плоскости симметрии, оси симметрии или в центре симметрии.
3. Экспериментальный (метод подвешивания тела).
4 Разбиение. Тело разбивается на конечное число частей, для каждой из которых положение центра тяжести C и площадь S известны. Например, проекцию тела на плоскость xOy (рисунок 1.8) можно представить в виде двух плоских фигур с площадями S1 и S2 (S = S1 + S2). Центры тяжести этих фигур находятся в точках C1(x1, y1) и C2(x2, y2). Тогда координаты центра тяжести тела равны

5. Дополнение (метод отрицательных площадей или объемов). Частный случай способа разбиения. Он применяется к телам, имеющим вырезы, если центры тяжести тела без выреза и вырезанной части известны. Например, необходимо найти координаты центра тяжести плоской фигуры
Кинематика
1.Способы задания движения точки. Их суть.
Векторный
Векторный – положение точки в пространстве однозначно определяется радиусом вектором r проведённым из центра O. r=r(t)(вектора)
Координатный
Координатный – положение точки в пространстве однозначно определено тремя декартовыми координатами xyz. X=f1(t); Y=f2(t); Z=f3(t);
Естественный
Естественный – этим способом удобно пользоваться в случае когда траектория точки известна заранее. S=S(t);
2.Как определяются скорости и ускорения точки при различных способах задания движения.
V=dS/dt x (тао)=Vt – при естественном
Vср=(дельта)r/(дельта)t м/c – при векторном
V=√(dx/dt)2+(dy/dt)2+(dz/dt)2(закрываем корень) – при координатном
a=dV/dt=V(вектор)=r’’ м/с – при векторном
a=(dVx/dt)i+ (dVy/dt)j +(dVz/dt)k – при координатном
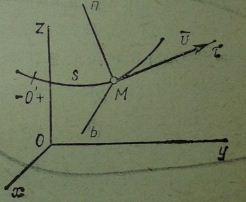
3.Как расположены оси естественного 3ёх гранника?
Рассмотрим, как вычисляются скорость и ускорение точки при естественном способе задания движения, т. е. когда заданы траектория точки и закон движения точки вдоль этой траектории в виде s=f(t).
В этом случае значения векторов v и а определяют по их проекциям не на оси системы отсчета Oxyz, а на подвижные оси Mtnb имеющие начало в точке М и движущиеся вместе с нею .Эти оси, называемые осями естественного трехгранника (или скоростными осями), направлены следующим образом: ось Мt — по касательной к траектории в сторону положительного отсчета расстояния s; ось Мп — по нормали к траектории, лежащей в соприкасающейся плоскости и направленной в сторону вогнутости траектории; ось Mb — перпендикулярно к первым двум так, чтобы она образовала с ними правую систему осей. Нормаль Мп, лежащая в соприкасающейся плоскости (в плоскости самой кривой, если кривая плоская), называется главной нормалью, а перпендикулярная ей нормаль Mb — бинормалью.
4.Записать ур-ния равномерного и равнопеременного движения материальной точки.
Равномерным называется движение точки с постоянной скоростью. S=V0(t) ; V=const;
V=dS/dt
Равнопеременное движение называется движение с постоянных касательным ускорением. V=v0+att; at=dV/dt; S=V0t+att2/2
5.Дать определение поступательного движения твёрдого тела.
Поступательное движение твёрдого тела – такое движение, при котором любая прямая, проведённая в этом теле, перемещается, оставаясь параллельно своему начальному напрвлению.
6.Дать определение вращательного движения твёрдого тела. Записать его ур-е.
Вращательным движением твердого тела вокруг неподвижной оси называется такое его движение, при котором какие-нибудь две точки, принадлежащие телу (или неизменно с ним связанные), остаются во всё время движения неподвижными.
W=f(t);
7.Угловая скорость и угловое ускорение : их физический смысл, величина и направление.
Физическую величину характеризующую быстроту изменения угла поворота тела стечение времени называется угловой скоростью.
Wср.=дельта(Y)/дельта(t)
Угловое ускорение – физическая величина характеризующая быстроту изменения … с течением времени.
Eср.= дельта(W)/дельта(t)
E=lim(t=>0) дельта(W)/дельта(t)=dW/dt
8.Записать уравнения равномерного и равнопеременного вращения твёрдого тела вокруг неподвижной оси.
Y=W0t – равномерное
W=W0+Et; Y=W0t+Et2/2 – равнопеременного
9.Векторное и аналитическое выражение скорости и ускорения точек твёрдого тела, вращающегося вокруг неподвижной оси.
Векторное:
an=WxV(вектора)
at=Exr(вектора)
10.Записать формулу Пуассона.
di/dt=Wxi; dj/dt=Wxj; dk/dt=Wxk;
11.Дать определение плоскопараллельного движения твёрдого тела.
- движение твёрдого тела при котором все его точки перемещаются в плоскостях параллельных некоторой неподвижной плоскости.
12.Записать уравнения плоскопараллельного движения твёрдого тела.
Xa=f1(t); ya=f2(t); (фи)=f3(t);
13.Сформулировать теорему о проекциях скоростей двух точек плоской фигуры на прямую, проходящую через эти точки.
теорема о проекциях скоростей точек плоской фигуры: проекции скоростей двух точек плоской фигуры на прямую, соединяющую эти точки, равны между собой
14.Дать определение МЦС, способы его нахождения.
МЦС(Мгновенный центр скоростей) – называется точка плоской фигуры скорость которой в данный момент времени = 0. Если тело движется не поступательно то в момент времени такая точка существует, при этом не единственная.
15.Дать определение МЦУ, способы его определения.
МЦУ – называется такая точка плоской фигуры ускорение которой в данный момент равно = 0. Обозначается Q. tgθ=|E|/W2=>θ
16.Как найти скорость точки с помощью МЦС?
Если
мгновенный центр скоростей Р найден и
если известна угловая скорость фигуры,
то скорость любой точки В фигуры
определяется как скорость этой точки
во вращательном движении вокруг МЦС,
т. е. вектор
![]() перпендикулярен к отрезку РВ и по модулю
равен w×РВ. Отсюда следует, что скорости
точек плоской фигуры пропорциональны
их расстояниям от мгновенного центра
скоростей, т. е.
перпендикулярен к отрезку РВ и по модулю
равен w×РВ. Отсюда следует, что скорости
точек плоской фигуры пропорциональны
их расстояниям от мгновенного центра
скоростей, т. е.![]()
17.Дать определение сложного движения точки.
Пусть твёрдое тело движется относительно подвижной системы координат которая в свою очередь перемещается относительно основной системы координат принятую за неподвижную в этом случае говорят что тело совершает сложное движение состоящее из 2-ух составляющих движения.
18.Величина, направление и физический смысл ускорения Кориолиса.
Векторное ускорение Кориолиса находится:
ae=r(WxVr);
Величина ускорения Кориолиса может быть наёдена:
ae=2WxVrsin(W;Vr)
Направление ускорения Кориолиса можно найти 2-мя способами:
1.По правилу векторного произведения 2.По правилу Жуковского
19.Дать определение сферического движения твёрдого тела.
Движение твёрдого тела при котором одна из его точек остается не подвижной называется сферическим движением. Все остальные точки движутся по сферам радиусы которых имеют начало в подвижном центре.
20.Углы Эйлера.
Углы Эйлера — углы, описывающие поворот абсолютно твердого тела в трёхмерном евклидовом пространстве.
В тер.мех. положение твёрдого тела при сферическом движении определяется при помощи углов Эйлера.
21.Величина и направление мгновенной угловой скорости и углового ускорения при сферическом движении.
Вектор мгновенной угловой скорости направлен по мгновенной оси в ту сторону откуда конечный поворот виден происходящим протии часовой стрелки. Вектор угловой скорости в общем случае изменяется по направлению и величине по выбранным ед.вектором W0. Величина угловой скорости не изменяется, лишь изменяется её направление.
22.Записать уравнения движения свободного твёрдого тела.
X1A=f1(t); Y1A=f2(t); Z1A=f3(t); Ψ=f4(t); (фи)=f5(t); θ=f6(t);
24. Доказать теорему об ускорениях точек плоской фигуры.
Теорема.
Ускорение
точки плоской фигуры равно сумме
ускорения полюса
![]() и
ускорения данной точки во вращательном
движении вокруг полюса
и
ускорения данной точки во вращательном
движении вокруг полюса![]()
25.Доказать теорему о сложении скоростей при сложном движении точки.
Теорема
о
сложении скоростей.
При
сложном движении точки абсолютная
скорость равна
![]() сумме
ее относительной
сумме
ее относительной![]() и
переносной
и
переносной![]() скоростей:
скоростей:
![]()
26.Доказать теорему о сложении ускорений при сложном движении
Теорема
о
сложении ускорений (теорема Кориолиса).
При
непоступательном переносном движении
абсолютное ускорение точки
![]() находится
как сумма трех ускорений: относительного
находится
как сумма трех ускорений: относительного![]() ,
переносного
,
переносного![]() и
ускорения
Кориолиса
и
ускорения
Кориолиса
![]()
![]() ,
,
![]() ,где
,где
![]() −
угловая скорость переносного вращения.
−
угловая скорость переносного вращения.
Оглавление
Статика 1
1.Аксиомы статики. Основные задачи статики. 1
2.Связи и их реакции. 1
3.Как определить равнодействующую сходящихся сил? 2
4.Теорема о равновесии трёх непараллельных сил. 2
5.Пара сил. Её характеристики. 2
6.Можно ли уравновесить пару сил? Если да, то, каким образом? 2
7.Векторное и аналитическое выражение момента силы относительно точки. 2
8.Как определить момент силы относительно оси ? 3
9.можно силу перенести параллельно самой себе? Если да, то каким образом? 3
10.Условия равновесия различных систем сил. 3
11.Что такое главный вектор и главный момент? 3
12.Чем схожи и различны главный вектор и равнодействующая? 4
13.Зависимость главного момента от центра приведения. 4
14.Инварианты статики. 4
15.Частные случаи приведения произвольной пространственной системы сил. 4
16.Как находится равнодействующая распределённых сил? 4
17.Какие задачи являются статически определёнными и статически неопределёнными? 4
18.Как направлены реакции при скольжении тела по шероховатой поверхности. 5
19.Как находится угол трения. Дать понятие конуса трения. 5
20.Сформулировать условие, при котором возможно и не возможно скольжение тела по шероховатой поверхности в зависимости от угла наклона силы к нормали поверхности скольжения. 5
21.Какие реакции возникают при качении тела по шероховатой поверхности без скольжения. 6
22.Размерность коэф.трения качения и скольжения. 6
23.Как находится центр параллельных сил? 6
24.Можно ли найти равнодействующую 2 параллельных неравных по модулю сил, направленных в одну сторону? Если да, то чему равна равнодействующая, и где она приложена? 6
25.Способы определения координат центров тяжести тел. 6
КИНЕМАТИКА 7
2.Как определяются скорости и ускорения точки при различных способах задания движения. 7
3.Как расположены оси естественного 3ёх гранника? 7
4.Записать ур-ния равномерного и равнопеременного движения материальной точки. 8
5.Дать определение поступательного движения твёрдого тела. 8
6.Дать определение вращательного движения твёрдого тела. Записать его ур-е. 8
7.Угловая скорость и угловое ускорение : их физический смысл, величина и направление. 8
9.Векторное и аналитическое выражение скорости и ускорения точек твёрдого тела, вращающегося вокруг неподвижной оси. 9
10.Записать формулу Пуассона. 9
11.Дать определение плоскопараллельного движения твёрдого тела. 9
12.Записать уравнения плоскопараллельного движения твёрдого тела. 9
13.Сформулировать теорему о проекциях скоростей двух точек плоской фигуры на прямую, проходящую через эти точки. 9
14.Дать определение МЦС, способы его нахождения. 9
15.Дать определение МЦУ, способы его определения. 9
16.Как найти скорость точки с помощью МЦС? 9
17.Дать определение сложного движения точки. 10
18.Величина, направление и физический смысл ускорения Кориолиса. 10
19.Дать определение сферического движения твёрдого тела. 10
20.Углы Эйлера. 10
21.Величина и направление мгновенной угловой скорости и углового ускорения при сферическом движении. 10
22.Записать уравнения движения свободного твёрдого тела. 10
24. Доказать теорему об ускорениях точек плоской фигуры. 10
25.Доказать теорему о сложении скоростей при сложном движении точки. 11
26.Доказать теорему о сложении ускорений при сложном движении 11