

2.8. Сведение системы оду 2-го порядка к системе оду 1-го порядка в канонической форме Коши
Для того чтобы свести систему ОДУ Лагранжа 2-го рода к системе ОДУ 1-го рода в канонической форме Коши, введём следующие новые переменные.
Заменив, получим:












Система
значений вида
 является
системой, пригодной для решения пакетами
MathCAD и MATLAB.
является
системой, пригодной для решения пакетами
MathCAD и MATLAB.
3. Тестирование полученных уравнений
Для того, чтобы проверить правильность составленных уравнений, нужно воспроизвести такую ситуацию, в которой поведение системы можно предугадать. Тогда моделируя такую ситуацию, можно сравнить, совпадают ли наши предположения с полученными результатами, чем и определить правильность составления системы ОДУ.
Тест
№ 1:
принимаем функции дороги
 ,
, ,
, равными нулю.
равными нулю.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Перемещение
q1
Перемещение
q2
Перемещение
q3
Перемещение
q4




Перемещение
q5
Перемещение
q6

Результат – в отсутствии кинематического воздействия дороги система не колеблется, т.е. все перемещения (углы поворота) и скорость их изменения равны нулю.
Тест
№ 2:
задаем очень большую жесткость для
пружин, соединяющих массы М1 , М2
 )
и задаем линейное перемещение массы
М1q1=3.
Результат: массы оказались «связанными»,
их колебания почти идентичны.
)
и задаем линейное перемещение массы
М1q1=3.
Результат: массы оказались «связанными»,
их колебания почти идентичны.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
Перемещение
q2
Перемещение
q4
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
Перемещение
q1
Перемещение
q2
Перемещение
q3
Перемещение
q4



Перемещение
q6
Перемещение
q5

Результат – т.к. масса М2 получает кинематическое воздействие дороги через корпус, то разорвав связь между корпусом и массой М2, мы получаем отсутствие колебаний (поворотов) массы М2.
Тест № 4: разрываем связь между корпусом и массами М4 и M3 (k7=k4=c2=0).
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
Перемещение
q2
Перемещение
q1


Перемещение
q3
Перемещение
q4
Перемещение
q5
Перемещение
q6



Результат – т.к. массы М3 и М4 получают кинематическое воздействие дороги через корпус, то разорвав связь между корпусом и массами, мы получаем отсутствие колебаний (поворотов) масс М3 и М4.
Тест № 5: разведем массы М3 и М4, задав им перемещения в противоположном направлении. В итоге массы должны иметь колебания с противоположным знаком.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
Перемещение
q1
Перемещение
q2
Перемещение
q3
Перемещение
q4
Перемещение
q5
Перемещение
q6






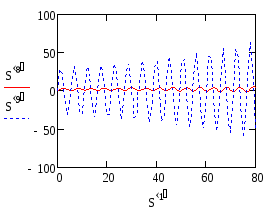
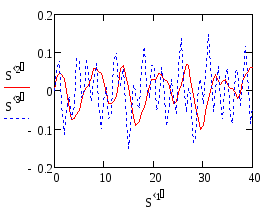
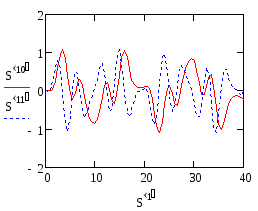
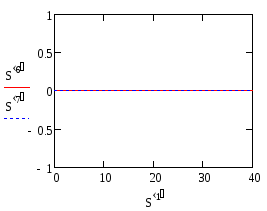
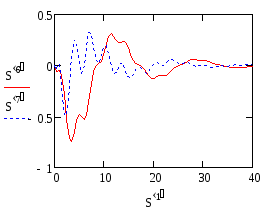
Тест № 6: добавляем демпферы.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
Перемещение
q1
Перемещение
q2
Перемещение
q3
Перемещение
q4


Перемещение
q5
Перемещение
q6


Результат – наблюдаем угасание колебаний.