

1.7. Трение Трение скольжения
При движении или стремлении двигать одно тело по поверхности другого в касательной плоскости поверхностей соприкосновения возникает сила трения скольжения (трение первого рода).
Пусть на тело действует плоская система активных сил и тело находится в равновесии, соприкасаясь с шероховатой поверхностью другого тела (рис. 16).
С ила
реакции
ила
реакции![]() шероховатой поверхности будет складываться
из нормального давления
шероховатой поверхности будет складываться
из нормального давления![]() ,
направленного по общей нормали к
поверхности соприкосновения, и силы
трения скольжения
,
направленного по общей нормали к
поверхности соприкосновения, и силы
трения скольжения![]() при покое.
при покое.
Для силы трения скольжения справедливы законы Кулона:
С
Рис. 16
ила трения скольжения находится в общей касательной плоскости соприкасающихся поверхностей тел и направлена в сторону, противоположную направлению возможного или реального скольжения тела под действием приложенных сил. Сила трения при покое зависит от активных сил и ее модуль заключен между нулем и максимальным значением, которое достигается в момент выхода тела из положения равновесия, т.е.
![]() .
.
Максимальная сила трения скольжения при прочих равных условиях не зависит от площади соприкосновения трущихся поверхностей. Из этого закона следует, что для того, чтобы сдвинуть, например, кирпич, надо приложить одну и ту же силу независимо от того, какой гранью он положен на поверхность, широкой или узкой.
Максимальная сила трения скольжения пропорциональна нормальному давлению (нормальной реакции), т. е.
![]() , (30)
, (30)
где безразмерный
коэффициент
![]() называют коэффициентом трения скольжения;
он не зависит от нормального давления.
называют коэффициентом трения скольжения;
он не зависит от нормального давления.
Коэффициент трения скольжения зависит от материала и физического состояния трущихся поверхностей, т.е. от величины и характера шероховатости, влажности, температуры и других условий. Коэффициент трения скольжения в зависимости от различных условий устанавливается экспериментально.
Трение качения
Если одно тело, например цилиндрический каток, катить или стремиться катить по поверхности другого тела, то кроме силы трения скольжения из-за деформации поверхностей тел дополнительно возникает пара сил, препятствующая качению катка. Явление возникновения пары сил, препятствующей качению, называют трением качения или трением второго рода.
А
Рис. 17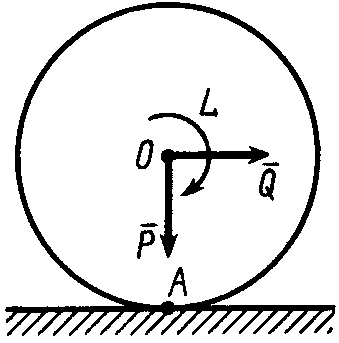
 ктивные
силы, действующие на катки в виде колес
(рис. 17), кроме силы тяжести
ктивные
силы, действующие на катки в виде колес
(рис. 17), кроме силы тяжести![]() обычно состоят из силы
обычно состоят из силы![]() ,
приложенной к центру колеса параллельно
общей касательной в точке
,
приложенной к центру колеса параллельно
общей касательной в точке![]() ,
и пары сил с моментом
,
и пары сил с моментом![]() ,
стремящейся катить колесо, называемое
в этом случаеведомо-ведущим.
Если
,
стремящейся катить колесо, называемое
в этом случаеведомо-ведущим.
Если
![]() ,
а
,
а![]() ,
то колесо называютведомым;
если
,
то колесо называютведомым;
если
![]() ,
а
,
а![]() ,
товедущим.
Ведомо-ведущими являются колеса
локомотива, идущего вторым в составе
поезда.
,
товедущим.
Ведомо-ведущими являются колеса
локомотива, идущего вторым в составе
поезда.
Приведем
активные силы в общем случае к точке
![]() .
В этой точке получим главный вектор
этих сил
.
В этой точке получим главный вектор
этих сил![]() и пару сил, момент которой равен главному
моменту
и пару сил, момент которой равен главному
моменту![]() (рис. 18).
(рис. 18).
П
Рис. 18
![]() ;
;
![]() .
.
Изменив
активные силы, приложенные к катку так,
чтобы увеличивался момент
![]() пары активных сил, стремящейся катить
каток. Пока каток находится в равновесии,
увеличивается и равный ему по числовой
величине, но противоположный по
направлению момент
пары активных сил, стремящейся катить
каток. Пока каток находится в равновесии,
увеличивается и равный ему по числовой
величине, но противоположный по
направлению момент![]() пары сил, препятствующий качению катка
и возникающий от действия на каток
неподвижной плоскости. Наибольшее
значение
пары сил, препятствующий качению катка
и возникающий от действия на каток
неподвижной плоскости. Наибольшее
значение![]() достигается в момент начала качения
катка по плоскости.
достигается в момент начала качения
катка по плоскости.
Установлены следующие приближенные законы для наибольшего момента пары сил, препятствующей качению:
Наибольший момент пары сил, препятствующей качению, в довольно широких пределах не зависит от радиуса катка.
Предельное значение момента
 пропорционально нормальному давлению,
а следовательно, и равной ему нормальной
реакции
пропорционально нормальному давлению,
а следовательно, и равной ему нормальной
реакции :
:
![]() . (31)
. (31)
Коэффициент
пропорциональности
![]() называют,коэффициентом
трения качения
при покое или коэффициентом
трения второго рода.
Из формулы (31) следует, что
называют,коэффициентом
трения качения
при покое или коэффициентом
трения второго рода.
Из формулы (31) следует, что
![]() имеет размерность длины.
имеет размерность длины.
Коэффициент трения качения
 зависит от материала катка, плоскости
и физического состояния их поверхностей.
Коэффициент трения качения при качении
в первом приближении можно считать не
зависящим от угловой скорости качения
катка и его скорости скольжения по
плоскости.
зависит от материала катка, плоскости
и физического состояния их поверхностей.
Коэффициент трения качения при качении
в первом приближении можно считать не
зависящим от угловой скорости качения
катка и его скорости скольжения по
плоскости.