

Дифференциальные уравнения плоского движения твердого тела
Для твердого тела, совершающего плоское движение и, следовательно, имеющего три степени свободы, соответственно получим следующие три дифференциальных уравнения:
![]() ,
,
![]() ,
,![]() .
(179)
.
(179)
С помощью этих уравнений можно решать две основные задачи: по заданному плоскому движению твердого тела находить действующие на тело внешние силы и по заданным внешним силам и начальным условиям определять его движение. При решении этих задач должны быть заданы масса тела и его момент инерции.
Лекция № 8
3.4.4. Теорема об изменении кинетической энергии Работа силы
Работа силы на каком-либо перемещении является одной из основных характеристик, оценивающих действие силы на этом перемещении.
Элементарная
работа силы.
Элементарная работа
![]() силы
силы![]() на элементарном (бесконечно малом)
перемещении
на элементарном (бесконечно малом)
перемещении![]() определяется следующим образом (рис.
54):
определяется следующим образом (рис.
54):
![]() , (180)
, (180)
где
![]() – проекция силы
– проекция силы![]() на направление скорости точки приложения
силы или на направление элементарного
перемещения, которое считается
направленным по скорости точки.
на направление скорости точки приложения
силы или на направление элементарного
перемещения, которое считается
направленным по скорости точки.
Элементарную работу можно представить, в виде:
![]() , (181)
, (181)
э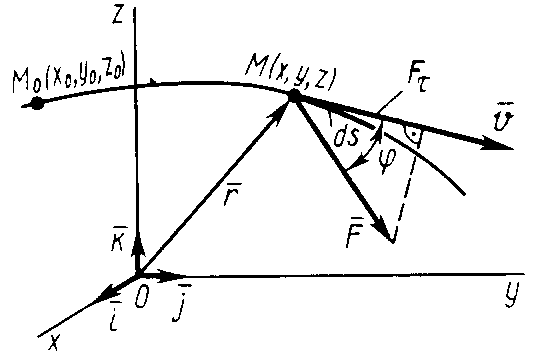 лементарная
работа силы равна произведению
элементарного перемещения ни проекцию
силы на это перемещение.
Отметим частые случаи, которые можно
получить из (180):
лементарная
работа силы равна произведению
элементарного перемещения ни проекцию
силы на это перемещение.
Отметим частые случаи, которые можно
получить из (180):
![]() ,
,
![]() ;
;
Рис. 54![]()
![]() ;
;
![]() ,
,
![]() .
.
Таким образом, если сила перпендикулярна элементарному перемещению, то ее элементарная работа равна нулю. В частности, работа нормальной составляющей к скорости силы всегда равна нулю.
Приведем другие формулы для вычисления элементарной работы силы:
![]() , (182)
, (182)
элементарная работа силы равна скалярному произведению силы на дифференциал радиуса-вектора точки приложения силы.
![]() , (183)
, (183)
элементарная работа равна скалярному произведению элементарного импульса силы на скорость точки.
Аналитическое выражение элементарной работы:
![]() . (184)
. (184)
Полная работа
силы.
Полная работа силы
![]() на перемещении от точки
на перемещении от точки![]() до точки
до точки![]() равна:
равна:
 , (185)
, (185)
Используя другие выражения для элементарной работы, полную работу силы можно представить также в виде
 , (186)
, (186)
или
![]() , (187)
, (187)
где момент времени
![]() соответствует точке
соответствует точке![]() ,
а момент времени
,
а момент времени![]() – точке
– точке![]() .
.
Из определения элементарной и полной работы следует:
работа равнодействующей силы на каком-либо перемещении равна алгебраической сумме работ составляющих сил на том же перемещении;
работа силы на полном перемещении равна сумме работ этой же силы на составляющих перемещениях, на которые любым образом разбито все перемещение.
Мощность. Мощность силы или работоспособность какого-либо источника силы часто оценивают той работой, которую он может совершить за единицу времени:
![]() .
.
Учитывая определение для элементарной работы, мощность можно представить в виде
![]() .
.
Таким образом, мощность равна скалярному произведению силы на скорость точки.
Примеры вычисления работы силы
Работа силы в общем случае зависит от характера движения точки приложения силы. Следовательно, для вычисления работы надо знать движение этой точки. Но в природе имеются силы и примеры движения, для которых работу можно вычислить сравнительно просто, зная начальное и конечное положение точки.
Работа силы
тяжести.
Силу
тяжести
![]() материальной точки массой
материальной точки массой![]() вблизи поверхности Земли можно считать
постоянной, равной
вблизи поверхности Земли можно считать
постоянной, равной![]() ,
направленной по вертикали вниз. Если
взять оси координат
,
направленной по вертикали вниз. Если
взять оси координат![]() ,
где ось
,
где ось![]() направлена по вертикали вверх, то
направлена по вертикали вверх, то
![]() ,
(188)
,
(188)
где
![]() – высота опускания точки.
– высота опускания точки.
При подъеме точки
высота
![]() является отрицательной. Следовательно,
в общем случае работа силы тяжести
является отрицательной. Следовательно,
в общем случае работа силы тяжести![]() равна
равна
![]() . (189)
. (189)
Если имеем систему
![]() материальных точек, то для каждой точки
с массой
материальных точек, то для каждой точки
с массой![]() будем иметь работу ее силы тяжести
будем иметь работу ее силы тяжести
![]() ,
,
где
![]() – начальная и конечная координаты
точки.
– начальная и конечная координаты
точки.
Работа всех сил тяжести системы материальных точек
![]() ,
(190)
,
(190)
где
![]() – масса системы точек;
– масса системы точек;![]() и
и![]() – начальная и конечная координаты
центра масс системы точек. Вводя
обозначение для изменения высоты центра
масс
– начальная и конечная координаты
центра масс системы точек. Вводя
обозначение для изменения высоты центра
масс![]() ,
имеем
,
имеем
![]() . (190')
. (190')
Работа линейной силы упругости. Линейной силой упругости (или линейной восстанавливающей силой) называют силу, действующую по закону Гука:
![]() ,
,
где
![]() – расстояние от точки равновесия, где
сила равна нулю, до рассматриваемой
точки
– расстояние от точки равновесия, где
сила равна нулю, до рассматриваемой
точки![]() ;
;![]() – постоянный коэффициент жесткости.
– постоянный коэффициент жесткости.
![]() . (191)
. (191)
По этой формуле
вычисляют работу линейной силы упругости
пружины при перемещении по любому пути
из точки
![]() ,
в которой ее удлинение (начальная
деформация) равно
,
в которой ее удлинение (начальная
деформация) равно![]() ,
в точку
,
в точку![]() ,
где деформация соответственно равна
,
где деформация соответственно равна![]() .
В новых обозначениях (191) принимает вид
.
В новых обозначениях (191) принимает вид
![]() . (191')
. (191')
Работа силы, приложенной к твердому телу. Получим формулы для вычисления элементарной и полной работы силы, приложенной в какой-либо точке твердого тела, которое совершает то или иное движение. Сначала рассмотрим поступательное и вращательное движения тела, а затем общий случай движения твердого тела.
При поступательном
движении
твердого
тела все
точки тела имеют одинаковые по модулю
и направлению скорости. Следовательно,
если сила
![]() приложена к точке
приложена к точке![]() ,
то, так как
,
то, так как![]() ,
,
![]() , (192)
, (192)
где
![]() – радиус-вектор произвольной точки
твердого тела. На каком-либо перемещении
полная работа
– радиус-вектор произвольной точки
твердого тела. На каком-либо перемещении
полная работа
 . (193)
. (193)
При вращении
твердого тела вокруг неподвижной оси
скорость точки
![]() можно вычислить по векторной формуле
Эйлера:
можно вычислить по векторной формуле
Эйлера:
![]() ,
,
тогда элементарную
работу силы
![]() определим по формуле
определим по формуле
![]() . (194)
. (194)
Таким образом, элементарная работа силы, приложенной к какой-либо точке тела, вращающегося вокруг неподвижной оси, равна произведению момента силы относительно оси вращения на дифференциал угла поворота тела.
Полная работа
![]() . (195)
. (195)
В частном случае,
если момент силы относительно оси
вращения является постоянным, т. е.
![]() ,
работу определяют по формуле
,
работу определяют по формуле
![]() . (196)
. (196)
Используя определение мощности силы
![]() . (197)
. (197)
Мощность силы, приложенной к вращающемуся вокруг неподвижной оси твердому телу, равна произведению угловой скорости тела на момент силы относительно оси вращения тела.
Для свободного
тела в общем
случае движения
скорость точки
![]() ,
в которой приложена сила
,
в которой приложена сила![]() ,
,
![]() ,
,
следовательно,
![]() . (198)
. (198)
Таким образом, элементарная работа силы, приложенной в какой-либо точке твердого тела, в общем случае движения складывается из элементарной работы на элементарном поступательном перемещении вместе с какой-либо точкой тела и на элементарном вращательном перемещении вокруг этой точки.
В случае вращения
твердого тела вокруг неподвижной точки,
выбрав эту точку за полюс
![]() ,
для элементарной работы имеем
,
для элементарной работы имеем
![]() . (199)
. (199)
Поворот на угол
![]() следует рассматривать в каждый момент
времени вокруг своей мгновенной оси
вращения.
следует рассматривать в каждый момент
времени вокруг своей мгновенной оси
вращения.
Работа внутренних сил твердого тела. Для твердого тела сумма работ внутренних сил равна нулю при любом его перемещении.