

3.3.2. Моменты инерции Моменты инерции относительно точки и оси
М оментом
инерции механической системы, состоящей
из
оментом
инерции механической системы, состоящей
из![]() материальных точек, относительно точки
материальных точек, относительно точки![]() называется сумма произведений масс
этих точек на квадраты их расстояний
до точки
называется сумма произведений масс
этих точек на квадраты их расстояний
до точки![]() (рис. 51), т. е.
(рис. 51), т. е.
![]() . (139)
. (139)
М
Рис. 51
![]() , (139')
, (139')
где
![]() – масса элементарной частицы тела (в
пределе точка);
– масса элементарной частицы тела (в
пределе точка);![]() – ее расстояние до точки
– ее расстояние до точки![]() .
.
Моментом
инерции
![]() системы материальных точек относительно
оси
системы материальных точек относительно
оси![]() называется сумма произведений масс
этих точек на квадраты их расстояний
называется сумма произведений масс
этих точек на квадраты их расстояний![]() до оси
до оси![]() (рис. 51):
(рис. 51):
![]() . (140')
. (140')
В частном случае сплошного тела сумму следует заменить интегралом:
![]() , (140')
, (140')
Моменты
инерции одинаковых по форме однородных
тел, изготовленных из разных материалов,
отличаются друг от друга. Характеристикой,
не зависящей от массы материала, является
радиус инерции. Радиус инерции
![]() ,
относительно оси
,
относительно оси![]() определяется но формуле
определяется но формуле
![]() , (141)
, (141)
где
![]() – масса тела.
– масса тела.
Момент инерции относительно оси через радиус инерции относительно этой оси определяется выражением
![]() , (141')
, (141')
В справочниках по моментам инерции приводят таблицы значений радиусов инерции различных тел.
Моменты инерции относительно осей координат
Моменты
инерции относительно декартовых осей
координат
![]() ,
,![]() и
и![]() и их начала – точки
и их начала – точки![]() (рис. 52) – определяются выражениями:
(рис. 52) – определяются выражениями:
![]() ,
,
![]() ,
,
![]() , (142)
, (142)
![]() ,
(143)
,
(143)
где
![]() – координаты материальных точек системы.
Для сплошных тел эти формулы примут вид
– координаты материальных точек системы.
Для сплошных тел эти формулы примут вид
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
С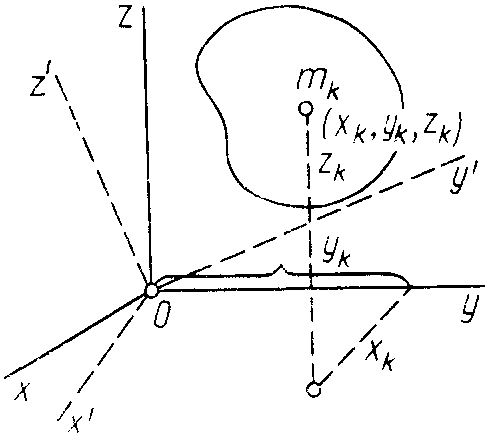 умма
моментов инерции относительно декартовых
осей координат не зависит от ориентации
этих осей в рассматриваемой точке,
т.е. является величиной, инвариантной
по отношению к направлению осей координат.
умма
моментов инерции относительно декартовых
осей координат не зависит от ориентации
этих осей в рассматриваемой точке,
т.е. является величиной, инвариантной
по отношению к направлению осей координат.
Д
Рис. 52![]() можно определить следующиетри
центробежных момента инерции:
можно определить следующиетри
центробежных момента инерции:
![]() ,
,
![]() ,
,![]() .
(144)
.
(144)
Центробежные моменты инерции часто называют произведениями инерции. Если центробежные моменты инерции равны нулю, оси называют главными осями инерции. Если при этом в качестве начала координат выбран центр масс, их называют главными центральными осями инерции
Моменты инерции относительно осей и точек – величины положительные. Центробежные моменты инерции могут быть как положительными, так и отрицательными.
Кроме
рассмотренных моментов инерции иногда
используются моменты
инерции относительно координатных
плоскостей
![]() ,
,![]() ,
,![]() :
:
![]() ,
,
![]() ,
,![]() .
.
3.3.3. Теорема Штейнера
У
Рис. 53
![]() и
и![]() .
Начало системы координат
.
Начало системы координат![]() находится в центре масс системы (рис.
53).
находится в центре масс системы (рис.
53).
По определению момента инерции относительно оси имеем:
![]() ,
,
 ,
,
где
![]() – масса точки
– масса точки![]() ,
а
,
а![]() и
и![]() – координаты этой точки относительно
систем
– координаты этой точки относительно
систем![]() и
и![]() .
Обозначим расстояние между осями
.
Обозначим расстояние между осями![]() и
и![]() через
через![]() .
.
Связь моментов инерции относительно двух параллельных осей, одна из которых проходит через центр масс, составляет содержание так называемой теоремы Штейнера или Гюйгенса–Штейнера: момент инерции системы относительно какой-либо оси равен моменту инерции относительно параллельной оси, проходящей через центр масс, плюс произведение массы системы на квадрат расстояния между этими осями:
![]() . (145)
. (145)