

2.1.1. Скорость и ускорение точки
О дной
из основных характеристик движения
точки является ее скорость относительно
выбранной системы отсчета, которая
изображена в виде декартовой прямоугольной
системы координат (рис. 21).
дной
из основных характеристик движения
точки является ее скорость относительно
выбранной системы отсчета, которая
изображена в виде декартовой прямоугольной
системы координат (рис. 21).
П
Рис. 21![]() относительно рассматриваемой системы
отсчета определяется в момент времени
относительно рассматриваемой системы
отсчета определяется в момент времени![]() радиусом-вектором
радиусом-вектором![]() ,
который соединяет неподвижную точку
,
который соединяет неподвижную точку![]() с этой точкой. В другой момент времени
с этой точкой. В другой момент времени![]() движущаяся точка займет положение
движущаяся точка займет положение![]() и ее радиусом-вектором будет
и ее радиусом-вектором будет![]() .
За время
.
За время![]() радиус-вектор движущейся точки изменится
на
радиус-вектор движущейся точки изменится
на![]() .
.
Средней скоростью
![]() точки за время
точки за время![]() называют отношение
называют отношение![]() ,
т.е.:
,
т.е.:
![]() .
.
Средняя скорость
параллельна вектору
![]() .
В общем случае она зависит от времени
осреднения
.
В общем случае она зависит от времени
осреднения![]() .
У нее нет конкретной точки приложения
на траектории.
.
У нее нет конкретной точки приложения
на траектории.
Введем скорость
точки
![]() в момент
в момент![]() ,
которая определяется как предел средней
скорости, если промежуток времени, за
который определяется средняя скорость,
стремится к нулю, т. е.
,
которая определяется как предел средней
скорости, если промежуток времени, за
который определяется средняя скорость,
стремится к нулю, т. е.
![]() .
.
Скорость точки
направлена в сторону ее движения по
предельному направлению вектора
![]() при
при![]() ,
стремящемся к нулю, т.е. по предельному
направлению секущей
,
стремящемся к нулю, т.е. по предельному
направлению секущей![]() ,
которая совпадает с касательной к
траектории в точке
,
которая совпадает с касательной к
траектории в точке![]() .
Таким образом, скорость точки равна
первой производной по времени от ее
радиуса-вектора. Она направлена по
касательной к траектории в сторону
движения точки.
.
Таким образом, скорость точки равна
первой производной по времени от ее
радиуса-вектора. Она направлена по
касательной к траектории в сторону
движения точки.
Начало радиуса-вектора
движущейся точки можно выбрать в любой
неподвижной точке. На рис. 21 представлен
случай, в котором радиусом-вектором
является также
![]() с началом в точке
с началом в точке![]() .
Радиусы-векторы имеют одинаковые
изменения
.
Радиусы-векторы имеют одинаковые
изменения![]() и
и![]() за время
за время![]() и поэтому
и поэтому
![]() . (44)
. (44)
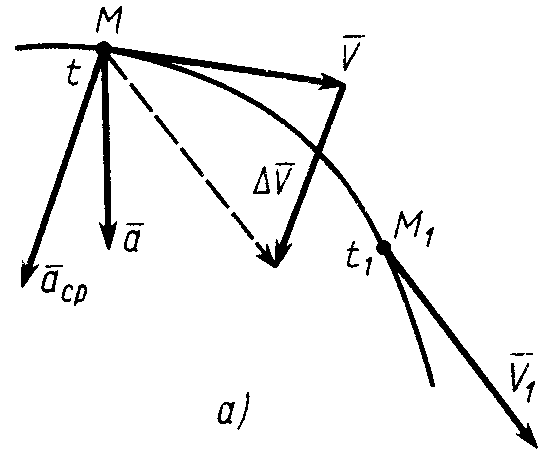
Пусть движущаяся
точка
![]() в момент времени
в момент времени![]() имеет скорость
имеет скорость![]() .
В момент времени
.
В момент времени![]() эта точка занимает положение
эта точка занимает положение![]() ,
имея скорость
,
имея скорость![]() (рис. 22). Чтобы изобразить приращение
скорости
(рис. 22). Чтобы изобразить приращение
скорости![]() за время
за время![]() ,
перенесем вектор скорости
,
перенесем вектор скорости![]() параллельно самому себе в точку
параллельно самому себе в точку![]() .
.
С
Рис. 22
![]() за время
за время![]() называют отношение
называют отношение![]() ,
т.е.
,
т.е.![]() .
Среднее ускорение точки параллельно
приращению скорости
.
Среднее ускорение точки параллельно
приращению скорости![]() .
Как и средняя скорость, среднее ускорение
не имеет на траектории конкретной т
.
Как и средняя скорость, среднее ускорение
не имеет на траектории конкретной т
![]() условно. В общем случае среднее ускорение
зависит от времени
условно. В общем случае среднее ускорение
зависит от времени![]() .
.
Ускорением точки
![]() в момент времени
в момент времени![]() называют предел, к которому стремится
среднее ускорение при
называют предел, к которому стремится
среднее ускорение при![]() ,
стремящемся к нулю, т. е.
,
стремящемся к нулю, т. е.
![]() . (45)
. (45)
Таким образом, ускорение точки равно первой производной по времени от скорости точки.
Приращение скорости
![]() и, следовательно, среднее ускорение
направлены внутрь вогнутости траектории.
Так же направлены и их предельные
значения при
и, следовательно, среднее ускорение
направлены внутрь вогнутости траектории.
Так же направлены и их предельные
значения при![]() ,
стремящемся к нулю. Поэтому ускорение
точки направлено тоже внутрь вогнутости
траектории.
,
стремящемся к нулю. Поэтому ускорение
точки направлено тоже внутрь вогнутости
траектории.
У скорение
точки можно представить в виде (рис.
23):
скорение
точки можно представить в виде (рис.
23):
![]() . (46)
. (46)
Часть ускорения, равная
Рис. 23![]()
называется касательной составляющей ускорения. Она направлена по касательной к траектории. Другая часть ускорения
![]()
называется
нормальной
составляющей ускорения
(![]() – радиус кривизны траектории). Она
направлена внутрь вогнутости траектории,
перпендикулярно
– радиус кривизны траектории). Она
направлена внутрь вогнутости траектории,
перпендикулярно![]() .
.
2.1.2. Векторный способ задания движения точки
Д
Рис. 24![]() этой точки (рис. 24). Движение точки
считается заданным, если известен
радиус-вектор движущейся точки как
функция времени, т. е.
этой точки (рис. 24). Движение точки
считается заданным, если известен
радиус-вектор движущейся точки как
функция времени, т. е.
![]() . (47)
. (47)
Задание векторного уравнения движения (47) полностью определяет движение точки.
Скорость точки направлена по касательной к траектории и вычисляется, согласно ее определению, по формуле:
![]() . (48)
. (48)
Для ускорения точки соответственно имеем
![]() . (49)
. (49)
Определение скорости и ускорения точки сводится к чисто математической задаче вычисления первой и второй производных по времени от радиуса-вектора этой точки.