


STANDARD AND PTS INTERRUPTS
5.5PROGRAMMING THE INTERRUPTS
The PTS select register (PTSSEL) selects either PTS service or a standard software interrupt service routine for each of the maskable interrupt requests (see Figure 5-4). The interrupt mask registers, INT_MASK and INT_MASK1, enable or disable (mask) individual interrupts (see Figures 5-5 and 5-6). With the exception of the nonmaskable interrupt (NMI) bit (INT_MASK1.7), setting a bit enables the corresponding interrupt source and clearing a bit disables the source.
To disable any interrupt, clear its mask bit. To enable an interrupt for standard interrupt service, set its mask bit and clear its PTS select bit. To enable an interrupt for PTS service, set both the mask bit and the PTS select bit.
Additionally, when you assign an interrupt to the PTS, you must set up a PTS control block (PTSCB) for each interrupt source (see “Initializing the PTS Control Blocks” on page 5-18) and use the EPTS instruction to globally enable the PTS. When you assign an interrupt to a standard software service routine, use the EI (enable interrupts) instruction to globally enable interrupt servicing.
NOTE
PTS routines will execute after a DI (disable interrupts) instruction, if the appropriate INT_MASK and PTSSEL bits are set. However, the end-of-PTS interrupt request will not occur. If an interrupt request occurs while interrupts are disabled, the corresponding pending bit is set in the INT_PEND or INT_PEND1 register.
5.5.1Programming the Multiplexed Interrupts
On the 87C196CA, the CAN-controller interrupts are multiplexed into the single CAN interrupt input (INT13). Write to the CAN control register (Figure 12-6 on page 12-13) to enable or disable global CAN interrupt sources (error, status change, and individual message object) and INT_MASK1.5 to enable or disable the multiplexed CAN interrupt.
The EPA4–9 and COMP0–1 e vent interrupts, the EPA0–9 overrun interrupts, and the timer 1 and timer 2 overflow/underflow interrupts are multiplexed into EPAx. Write to the EPA_MASK (Figure 10-12 on page 10-27) or EPA_MASK1 (Figure 10-13 on page 10-27) registers to enable or disable the multiplexed EPA interrupt sources and INT_MASK.0 to enable or disable the EPAx interrupt.
The PTS cannot determine the source of multiplexed interrupts, so do not use it to service these interrupts when more than one multiplexed interrupt is unmasked.
5-11
8XC196Kx, Jx, CA USER’S MANUAL
PTSSEL |
Address: |
04H |
|
Reset State: |
0000H |
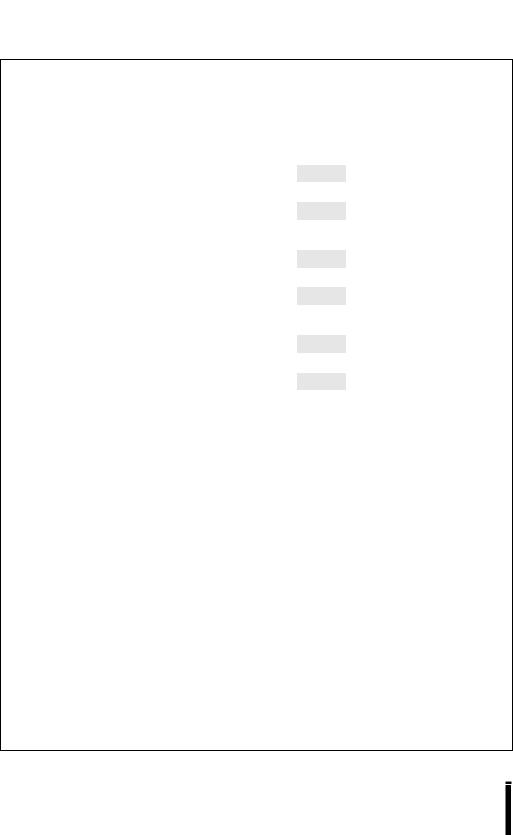
The PTS select (PTSSEL) register selects either a PTS microcode routine or a standard interrupt service routine for each interrupt requests. Setting a bit selects a PTS microcode routine; clearing a bit selects a standard interrupt service routine. When PTSCOUNT reaches zero, hardware clears the corresponding PTSSEL bit. The PTSSEL bit must be set manually to re-enable the PTS channel.
|
15 |
|
|
|
|
|
|
|
|
|
|
|
8 |
|
87C196CA |
|
— |
|
|
EXTINT |
CAN |
|
RI |
|
|
TI |
SSIO1 |
SSIO0 |
— |
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
— |
|
— |
AD |
|
EPA0 |
|
|
EPA1 |
EPA2 |
EPA3 |
EPAx |
|
|
|
15 |
|
|
|
|
|
|
|
|
|
|
|
8 |
8XC196Jx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
— |
|
|
EXTINT |
— |
|
RI |
|
|
TI |
SSIO1 |
SSIO0 |
— |
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
— |
|
— |
AD |
|
EPA0 |
|
|
EPA1 |
EPA2 |
EPA3 |
EPAx |
|
|
15 |
|
|
|
|
|
|
|
|
|
|
|
8 |
|
8XC196Kx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
— |
|
|
EXTINT |
— |
|
RI |
|
|
TI |
SSIO1 |
SSIO0 |
CBF |
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
IBF |
|
OBE |
AD |
|
EPA0 |
|
|
EPA1 |
EPA2 |
EPA3 |
EPAx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Bit |
|
|
|
|
|
|
|
Function |
|
|
|
|
||
Number |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
14:0 |
Setting this bit causes the corresponding interrupt to be handled by a PTS microcode |
|||||||||||||
(Note 1) |
routine. |
|
|
|
|
|
|
|
|
|
|
|||
|
The PTS interrupt vector locations are as follows: |
|
|
|
|
|||||||||
|
|
Bit Mnemonic Interrupt |
|
|
|
|
PTS Vector |
|
||||||
|
|
EXTINT |
EXTINT pin |
|
|
|
|
205CH |
|
|
||||
|
|
CAN (CA)† |
CAN Peripheral |
|
|
|
|
205AH |
|
|
||||
|
|
RI |
SIO Receive |
|
|
|
|
2058H |
|
|
||||
|
|
TI |
SIO Transmit |
|
|
|
|
2056H |
|
|
||||
|
|
SSIO1 |
SSIO 1 Transfer |
|
|
|
|
2054H |
|
|
||||
|
|
SSIO0 |
SSIO 0 Transfer |
|
|
|
|
2052H |
|
|
||||
|
|
CBF (Kx) |
Slave Port Command Buffer Full |
2050H |
|
|
||||||||
|
|
IBF (Kx) |
Slave Port Input Buffer Full |
|
204EH |
|
|
|||||||
|
|
OBE (Kx) |
Slave Port Output Buffer Empty |
204CH |
|
|
||||||||
|
|
AD |
A/D Conversion Complete |
|
204AH |
|
|
|||||||
|
|
EPA0 |
EPA Capture/Compare Channel 0 |
2048H |
|
|
||||||||
|
|
EPA1 |
EPA Capture/Compare Channel 1 |
2046H |
|
|
||||||||
|
|
EPA2 |
EPA Capture/Compare Channel 2 |
2044H |
|
|
||||||||
|
|
EPA3 |
EPA Capture/Compare Channel 3 |
2042H |
|
|
||||||||
|
|
EPAx† |
Multiplexed EPA |
|
|
|
|
2040H |
|
|
||||
|
† PTS service is not recommended because the PTS cannot determine the source of |
|||||||||||||
|
multiplexed interrupts. |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.Bit 13 is reserved on the 8XC196Jx, Kx devices and bits 6–8 are reserved on the 87C196CA, 8XC196Jx devices. For compatibility with future devices, write zeros to these bits.
Figure 5-4. PTS Select (PTSSEL) Register
5-12
STANDARD AND PTS INTERRUPTS
INT_MASK |
Address: |
08H |
|
Reset State: |
00H |
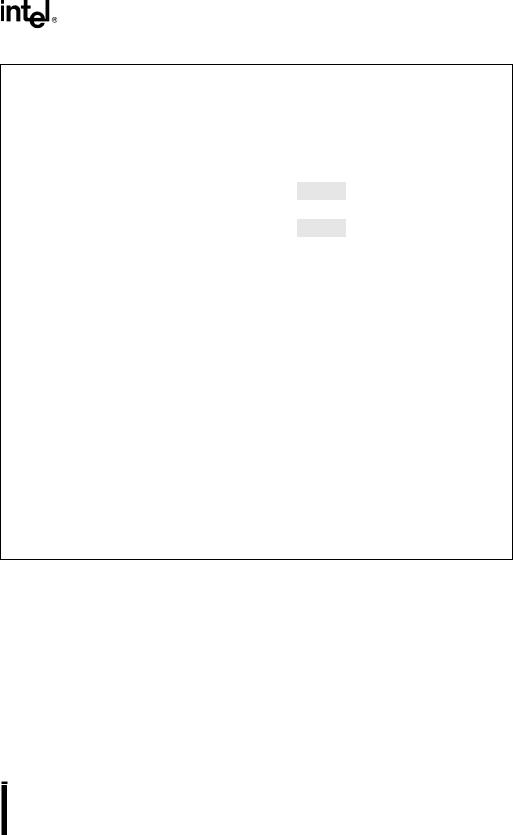
The interrupt mask (INT_MASK) register enables or disables (masks) individual interrupts. (The EI and DI instructions enable and disable servicing of all maskable interrupts.). INT_MASK is the low byte of the program status word (PSW). PUSHF or PUSHA saves the contents of this register onto the stack and then clears this register. Interrupt calls cannot occur immediately following this instruction. POPF or POPA restores it.
|
7 |
|
|
|
|
|
|
|
|
|
|
0 |
|
CA, Jx |
|
— |
— |
|
AD |
|
EPA0 |
|
|
EPA1 |
EPA2 |
EPA3 |
EPAx |
|
|
7 |
|
|
|
|
|
|
|
|
|
|
0 |
8XC196Kx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
IBF |
OBE |
AD |
|
EPA0 |
|
|
EPA1 |
EPA2 |
EPA3 |
EPAx |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Bit |
|
|
|
|
|
|
Function |
|
|
|
|
||
Number |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
7:0† |
Setting this bit enables the corresponding interrupt. |
|
|
|
|||||||||
|
The standard interrupt vector locations are as follows: |
|
|
|
|||||||||
|
|
Bit Mnemonic |
Interrupt |
|
|
|
|
Standard Vector |
|
||||
|
|
IBF (Kx) |
|
Slave Port Input Buffer Full |
|
200EH |
|
|
|||||
|
|
OBE (Kx) |
|
Slave Port Output Buffer Empty |
200CH |
|
|
||||||
|
|
AD |
|
A/D Conversion Complete |
|
200AH |
|
|
|||||
|
|
EPA0 |
|
EPA Capture/Compare Channel 0 |
2008H |
|
|
||||||
|
|
EPA1 |
|
EPA Capture/Compare Channel 1 |
2006H |
|
|
||||||
|
|
EPA2 |
|
EPA Capture/Compare Channel 2 |
2004H |
|
|
||||||
|
|
EPA3 |
|
EPA Capture/Compare Channel 3 |
2002H |
|
|
||||||
|
|
EPAx†† |
|
Multiplexed EPA |
|
|
|
|
2000H |
|
|
||
|
†† EPA 4–9 capture/compare channel events, EPA 0–1 compare channel events, EPA 0– |
||||||||||||
|
9 capture/compare overruns, and timer overflows can generate this multiplexed interrupt. |
||||||||||||
|
The EPA mask and pending registers decode the EPAx interrupt. Write the EPA mask |
||||||||||||
|
registers (EPA_MASK and EPA_MASK1) to enable the interrupt sources; read the EPA |
||||||||||||
|
pending registers (EPA_PEND and EPA_PEND1) to determine which source caused the |
||||||||||||
|
interrupt. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
† Bits 6–7 are reserved on the 87C196CA and 8XC196Jx devices. For compatibility with future devices, write zeros to these bits.
Figure 5-5. Interrupt Mask (INT_MASK) Register
5-13
8XC196Kx, Jx, CA USER’S MANUAL
INT_MASK1 |
Address: |
13H |
|
Reset State: |
00H |
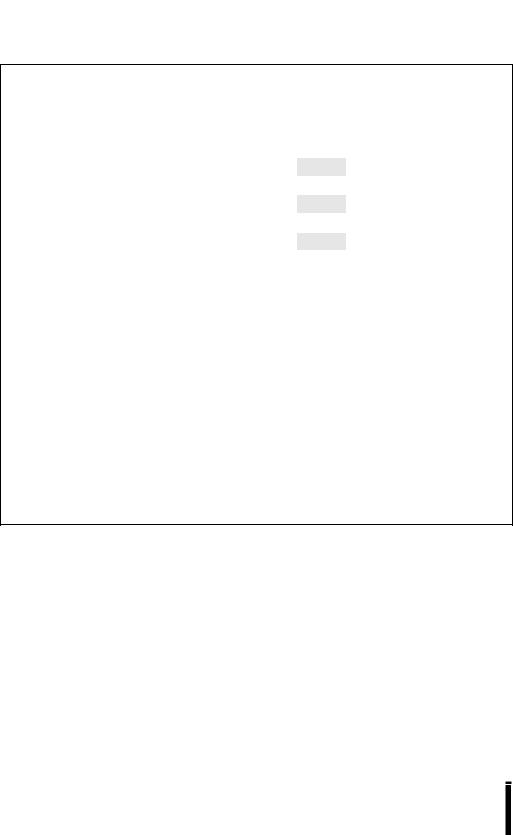
The interrupt mask 1 (INT_MASK1) register enables or disables (masks) individual interrupts. (The EI and DI instructions enable and disable servicing of all maskable interrupts.) INT_MASK1 can be read from or written to as a byte register. PUSHA saves this register on the stack and POPA restores it.
|
7 |
|
|
|
|
|
|
|
|
|
|
0 |
|
87C196CA |
|
NMI |
|
EXTINT |
CAN |
|
RI |
|
|
TI |
SSIO1 |
SSIO0 |
— |
|
|
7 |
|
|
|
|
|
|
|
|
|
|
0 |
8XC196Jx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
— |
|
EXTINT |
— |
|
RI |
|
|
TI |
SSIO1 |
SSIO0 |
— |
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
0 |
8XC196Kx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
NMI |
|
EXTINT |
— |
|
RI |
|
|
TI |
SSIO1 |
SSIO0 |
CBF |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Bit |
|
|
|
|
|
|
Function |
|
|
|
|
||
Number |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
7:0† |
Setting this bit enables the corresponding interrupt. |
|
|
|
|
||||||||
|
The standard interrupt vector locations are as follows: |
|
|
|
|||||||||
|
|
Bit Mnemonic Interrupt |
|
|
|
|
Standard Vector |
|
|||||
|
|
NMI†† |
Nonmaskable Interrupt |
|
203EH |
|
|
||||||
|
|
EXTINT |
EXTINT Pin |
|
|
|
|
203CH |
|
|
|||
|
|
CAN (CA) |
CAN Peripheral |
|
|
|
|
203AH |
|
|
|||
|
|
RI |
SIO Receive |
|
|
|
|
2038H |
|
|
|||
|
|
TI |
SIO Transmit |
|
|
|
|
2036H |
|
|
|||
|
|
SSIO1 |
SSIO 1 Transfer |
|
|
|
|
2034H |
|
|
|||
|
|
SSIO0 |
SSIO 0 Transfer |
|
|
|
|
2032H |
|
|
|||
|
|
CBF (Kx) |
Slave Port Command Buffer Full |
2030H |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
† Bit 5 is reserved on the 8XC196Jx, Kx devices and bit 0 is reserved on the 87C196CA, 8XC196Jx devices. For compatibility with future devices, always write zeros to these bits.
†† NMI is always enabled. This nonfunctional mask bit exists for design symmetry with the INT_PEND1 register. Always write zero to this bit.
Figure 5-6. Interrupt Mask 1 (INT_MASK1) Register
5.5.2Modifying Interrupt Priorities
The software can modify the default priorities of maskable interrupts by controlling the interrupt mask registers (INT_MASK and INT_MASK1). For example, you can specify which interrupts, if any, can interrupt an interrupt service routine. The following code shows one way to prevent all interrupts, except EXTINT (priority 14), from interrupting an SIO receive interrupt service routine (priority12).
5-14

|
STANDARD AND PTS INTERRUPTS |
SERIAL_RI_ISR: |
|
PUSHA |
; Save PSW, INT_MASK, INT_MASK1, & WSR |
|
; (this disables all interrupts) |
LDB INT_MASK1, #01000000B |
; Enable EXTINT only |
EI |
; Enable interrupt servicing |
|
; Service the RI interrupt |
POPA |
; Restore PSW, INT_MASK, INT_MASK1, & |
|
; WSR registers |
RET |
|
CSEG AT 2038H |
; fill in interrupt table |
DCW SERIAL_RI_ISR |
END |
Note that location 2038H in the interrupt vector table must be loaded with the value of the label SERIAL_RI_ISR before the interrupt request occurs and that the receive interrupt must be enabled for this routine to execute.
This routine, like all interrupt service routines, is handled in the following manner:
1.After the hardware detects and prioritizes an interrupt request, it generates and executes an interrupt call. This pushes the program counter onto the stack and then loads it with the contents of the vector corresponding to the highest priority, pending, unmasked interrupt. The hardware will not allow another interrupt call until after the first instruction of the interrupt service routine is executed.
2.The PUSHA instruction, which is now guaranteed to execute, saves the contents of the PSW, INT_MASK, INT_MASK1, and window select register (WSR) onto the stack and then clears the PSW, INT_MASK, and INT_MASK1. In addition to the arithmetic flags, the PSW contains the global interrupt enable bit (I) and the PTS enable bit (PSE). By clearing the PSW and the interrupt mask registers, PUSHA effectively masks all maskable interrupts, disables standard interrupt servicing, and disables the PTS. Because PUSHA is a protected instruction, it also inhibits interrupt calls until after the next instruction executes.
3.The LDB INT_MASK1 instruction enables those interrupts that you choose to allow to interrupt the service routine. In this example, only EXTINT can interrupt the receive interrupt service routine. By enabling or disabling interrupts, the software establishes its own interrupt servicing priorities.
4.The EI instruction re-enables interrupt processing and inhibits interrupt calls until after the next instruction executes.
5.The actual interrupt service routine executes within the priority structure established by the software.
5-15