

Кинематика. Конспект лекций
.pdfа
б
в
г
Рисунок 3.2 Примеры сложного движения точки
В примере на рисунке 3.2, а движение человека внутри автобуса является переносным, движение автобуса по дороге является переносным, а
движение человека относительно земли является абсолютным.
Возвратно-поступательное движение точки М зуборезного инструмента – долбяка вместе с бабкой зубодолбежного станка является переносным, вращение точки вместе с инструментом – относительным,
результирующее движение относительно неподвижного корпуса станка – абсолютным.
Движение лопасти М барабана вместе с комбайном и жаткой в примере на рисунке 3.2, в является переносным, вращение вместе с мотовилом относительным, движение лопасти, наблюдаемое с земли, считается абсолютным.
На рисунке 3.2, г гранула М совершает относительное движение по лопасти диска разбрасывателя минеральных удобрений и переносное вращение вместе с диском. Результирующим (абсолютным) является движение точки М относительно земли.
Дадим определения абсолютной, относительной и переносной скоростей (ускорений) точки.
Абсолютной скоростью (ускорением) точки называется скорость
(ускорение) точки по отношению к неподвижной системе отсчета x1 y1 z1 .
Относительной скоростью (ускорением) точки М называется скорость
(ускорение) этой точки по отношению к подвижной системе координат xyz .
Переносной скоростью (ускорением) называется скорость (ускорение)
той точки подвижной системы относительно неподвижной, с которой в данный момент совпадает движущаяся точка М.
3.2 Теорема сложения скоростей при сложном движении точки
Вектор абсолютной скорости точки в данный момент времени равен геометрической сумме векторов переносной и относительной скоростей в тот же момент времени:
|
|
|
|
|
|
|
|
a e r . |
(3.1) |
||||||
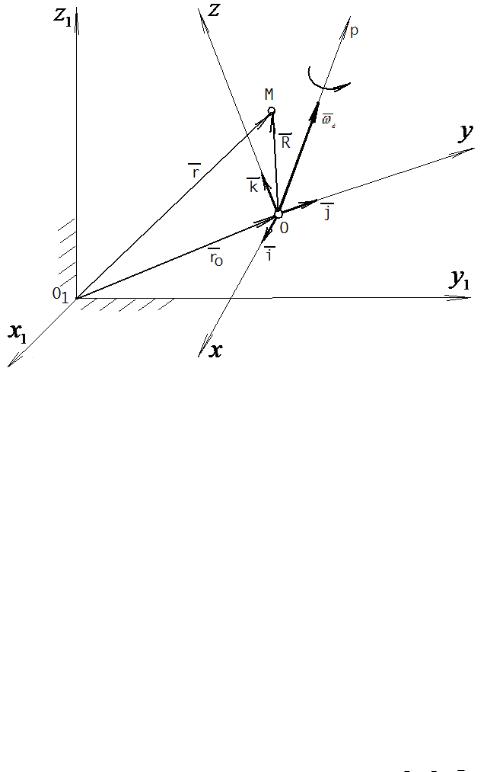
Доказательство. Воспользуемся кинематической схемой на рисунке 3.2.
Рисунок 3.2 Кинематическая схема сложного движения точки при вращательном переносном движении
В соответствии с чертежом
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.2) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
r |
rO R rO x i y j z k . |
||||||||||||||||||||||||||||||
|
|
|
|
Мысленно |
останавливаем |
|
переносное движение, считаем в (3.2) |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
постоянными. |
|
|
|
Дифференцируя (3.2), |
определяем |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
rO , i , j, k |
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
относительную скорость r : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
dx |
|
|
|
dy |
|
|
|
|
dz |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
r |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
j |
|
k . |
(3.3) |
||||||||||||||
|
|
|
|
|
|
|
|
|
r |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
dt |
dt |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
||||||||
|
|
|
|
Мысленно |
останавливаем |
|
|
относительное движение |
точки М и |
|||||||||||||||||||||||||||||||
определяем скорость той точки подвижной системы отсчета, с которой в данный момент совпадает с точкой М. При дифференцировании (3.2) считаем координаты x, y, z точки постоянными, орты i , j, k переменными, так

как в общем случае они меняют свое направление. Переносная скорость e
равна:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
dj |
z |
dk |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rO |
x |
di |
|
|
|
|
|
|
|
|
|
|
|
(3.4) |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
dt |
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Для определения абсолютной скорости точки М дифференцируем (3.2), |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
считая |
|
|
|
|
|
|
|
j |
, k , x, |
y. |
z переменными величинами: |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
rO , i , |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dy |
|
|
|
dz |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
( |
rO |
x |
di |
y |
dj |
z |
dk |
) ( |
dx |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
i |
j |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
a |
k ) e r . |
(3.5) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
dt |
dt |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
dt |
dt |
|
|
dt |
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|||||||||||||||||||||||||||||||
Таким образом, теорема доказана. Теорема (3.5) справедлива как в случае поступательно, так и в случае вращательного переносного движения.
3.3 Теорема сложения ускорений при поступательном переносном движении
Если переносное движение является поступательным, то абсолютное ускорение точки равно геометрической сумме переносного и относительного ускорений этой точки:
aa ae ar . |
(3.6) |
Доказательство. Определим переносное ускорение точки |
М. При |
поступательном переносном движении ускорения всех точек подвижного твердого тела на рисунке 3.1 равны, в качестве переносного ускорения можно
определить ускорение точки О: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.7) |
||||||
|
|
|
|
|
|
ae aO rO . |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Для определения относительного ускорения дифференцируем |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
относительную скорость, считая в выражении (3.3) единичные орты i |
, |
j, |
k |
||||||||||||||||||||||
постоянными: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d 2 x |
|
|
|
d 2 y |
|
|
|
d 2 z |
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ar |
r |
|
i |
j |
k . |
(3.8) |
|||||||||||||||||||
dt |
|
dt 2 |
dt 2 |
dt 2 |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Определяем абсолютное ускорение точки. Дифференцируем |
|||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||
выражение абсолютной скорости (3.5), считая единичные орты i |
, |
j, |
k |
||||||||||||||||||||||
постоянными: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
d 2 |
r |
|
|
d 2 x |
|
|
|
d 2 y |
|
|
|
d 2 z |
|
|
|
|
||
aa |
a |
|
|
( |
i |
j |
k ) a e ar |
|
||||||||||||||
|
|
O |
|
|
|
|
|
(3.9) |
||||||||||||||
dt |
|
|
dt 2 |
dt |
|
dt |
|
|||||||||||||||
|
|
dt 2 |
|
|
|
2 |
|
|
|
2 |
|
|
|
|
||||||||
Теорема доказана.
3.4 Производная единичного вектора
Вспомним формулу Эйлера (2.5) для определения скорости произвольной точки вращающегося твердого тела (скорости конца вектора
R )
R .
Найдем производные по времени от единичных векторов i , j, k
подвижных осей координат как скорости концов этих векторов. По аналогии с (2.5) будем иметь:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
di |
|
|
|
|
dj |
e |
|
|
dk |
|
|
|
|
|
||||
|
e i |
; |
j |
; |
|
e k |
. |
(3.10) |
||||||||||
dt |
|
dt |
dt |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
3.4 Теорема сложения ускорений при вращательном переносном движении
Для определения |
|
переносного |
ускорения |
ae |
|
|
дифференцируем |
||||||||||||||||||||||||||||||||||||||||||||
выражение переносной скорости (3.4), считая в последнем выражении |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
rO , |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
переменными: |
|
|
|
|
||||||||||||||
координаты x, y, z точки постоянными, орты i |
, j, |
k |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
d 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d 2i |
|
|
|
|
|
d 2 j |
|
|
|
|
|
d 2 k |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
ae |
d |
e |
|
|
r |
x |
y |
|
z |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.11) |
|||||||||||||||||||||||||
|
dt |
|
|
|
dt 2 |
dt 2 |
|
dt 2 |
dt 2 |
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
Определяем относительное ускорение ar . При дифференцировании |
|||||||||||||||||||||||||||||||||||||||||||||||||||
выражения (3.3) относительной скорости единичные |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
вектора i |
, j, |
|
k |
||||||||||||||||||||||||||||||||||||||||||||||
считаем постоянными. Будем иметь: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
d 2 x |
|
|
|
|
d 2 y |
|
|
|
|
d 2 z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
ar |
r |
|
|
i |
|
j |
|
|
k . |
|
|
|
|
|
(3.12) |
||||||||||||||||||||||||||||||||||||
|
dt |
|
|
dt 2 |
|
dt 2 |
|
dt 2 |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Дифференцируем по времени выражение (3.5) абсолютной скорости точки М:

|
|
|
|
|
|
|
|
|
|
|
|
d 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d 2i |
|
|
|
|
|
|
|
d 2 j |
|
|
|
|
|
|
|
|
|
d 2 k |
|
||||||||||||
|
|
|
|
d |
a |
( |
r |
|
|
x |
|
y |
|
z |
|
|||||||||||||||||||||||||||||||||||||||||
a |
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
a |
|
dt |
|
dt |
2 |
|
|
|
dt 2 |
|
dt 2 |
|
dt 2 |
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
d 2 x |
|
|
d 2 y |
|
|
|
|
|
|
|
|
d 2 z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
) 2( |
dx |
|
|
di |
|
|
dy |
|
|
||||||||||||||||||||||||||||||||
i |
|
j |
|
k |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
dt 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
dt 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt 2 |
|
|
|
|
|
|
|
|
dt |
|
|
|
dt |
|
|
|
dt |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
a |
|
a |
|
|
|
2( |
dx |
|
|
di |
|
dy |
|
dj |
|
dz |
|
dk |
) |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
e |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
dt dt |
|
dt dt |
dt |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
) |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
dj |
|
dz |
|
dk |
) |
(3.13) |
||||
|
|
|
|||||||||
|
dt |
|
dt |
|
dt |
|
|||||
Обозначим последний слагаемый в (3.13), имеющий размерность
ускорения, как ak и преобразуем с учетом (3.10):
ak 2( e |
dx |
|
|
|
|
e |
dy |
|
|
|
e |
dz |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
i |
|
j |
k |
) e (x |
i |
y |
j z k ) . |
||||||||||||||||||||||||
dt |
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
||||||||
Здесь вектор |
|
|
|
|
|
|
|
|
|
|
|
в соответствии с (3.3) |
является вектором |
|||||||||||||||||||
|
x i |
y j z k |
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
относительной скорости r . Таким образом, |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ak |
|
|
|
|
|
|
(3.14) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 e r . |
|
|
|
|||||||||||||||||
Ускорение |
ak |
|
|
|
|
называется ускорением Кориолиса. Ускорение |
||||||||||||||||||||||||||
Кориолиса равно по модулю и направлению удвоенному векторному произведению угловой скорости переносного движения на относительную
скорость точки. |
|
Перепишем равенство (3.13) в виде |
|
aa ae ar ak . |
(3.15) |
Сформулируем доказанную теорему Кориолиса. В |
случае, когда |
переносное движение точки является вращательным, абсолютное ускорение точки равно геометрической сумме переносного, относительного ускорений и ускорения Кориолиса.
Для определения направления ускорения Кориолиса (3.14)
воспользуемся правилом векторного произведения. Вектор ak направлен перпендикулярно плоскости, в которой расположены вектора
образом, чтобы наблюдатель, смотря с положительного конца вектора ak ,
видел кратчайший поворот первого сомножителя до совмещения со вторым сомножителем r против хода часовой стрелки (рисунок 3.3).
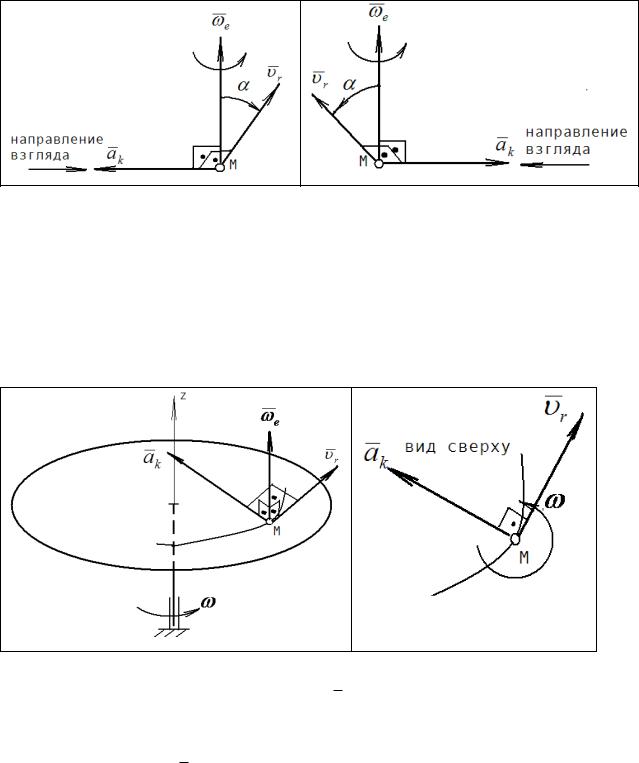
Рисунок 3.3 Определение направления ускорения Кориолиса Модуль ускорения ak равен
ak 2 r sin .
Рассмотрим частный случай плоского движения точки М, показанный на рисунке 3.4. Точка совершает относительное движениется в плоскости,
перпендикулярной оси вращения.
Рисунок 3.4 Случай плоского сложного движения точки
При 90о все три вектора e , r , ak взаимно перпендикулярны. В
рассматриваемом случае для определения направления вектора ak
достаточно вектор r повернуть в сторону переносного вращательного движения на угол 90°.
Модуль ускорения Кориолиса при 90о равен
ak 2 r .
Примеры решения задач

Задача 3.1 Шары центробежного регулятора Уатта, вращающегося вокруг вертикальной оси с угловой скоростью 10 рад/с, благодаря изменению нагрузки машины отходят от этой оси, имея для своих стержней в данном положении угловую скорость 1 1,2 рад/с. Найти абсолютную скорость шаров регулятора в рассматриваемый момент, если длина стержней
L 0,5 м, расстояние между осями их подвеса 2e 0,1 м, углы, образованные стержнями с осью регулятора, 1 2 30o .
Рисунок 3.5 Кинематическая схема центробежного регулятора Уатта
Решение. Шары регулятора, изображенного на рисунке 3.5, совершают сложное движение. Свяжем с вращающимся валом подвижную систему отсчета xyz . Переносным движением является вращение вокруг вертикальной оси с угловой скоростью . Относительным движением шаров является их вращение вокруг осей О1 и О2 вместе со стержнями с угловой скоростью 1 .
Применим для шара, который мы считаем материальной точкой,
теорему сложения скоростей (3.5)
a e r .
Переносная скорость точки равна:
e r (e L sin ) 10 (0,05 0,5 sin 30o ) 3,0 м/с; e || Ox .
Определяем и показываем на чертеже относительную скорость:
r 1 L 1,2 0,5 0,6 м/с; r O1M1 .
При e r абсолютная скорость шаров равна
a 
 e2 r2
e2 r2 
 3,02 0,62 3,06 м/с.
3,02 0,62 3,06 м/с.
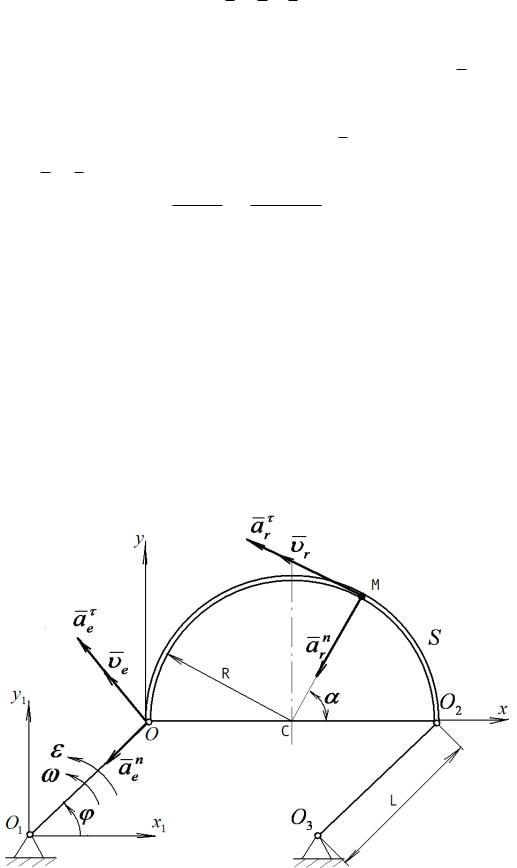
Задача 3.2 На рисунке 3.6 изображен параллелограммный механизм.
Полукруглая пластина радиуса R 0,4 м приводится в движение двумя кривошипами длины L 0,3 , вращающимися вокруг неподвижных осей в соответствии с законом 0,1 t2 0,2 t рад, где t - время в с. По ободу
пластины движется точка М в соответствии с законом O2M S 0,25 t2
рад. Определить в момент времени t1 2 с абсолютную скорость и абсолютное ускорение точки М.
Рисунок 3.6 Сложное движение точки М

Решение. 1. Рассмотрим движение точки М как сложное. Покажем на
чертеже неподвижные оси координат x1O1 y1 и подвижную систему отсчета xOy, связанную с пластиной. Движение точки М вместе с пластиной (вместе с подвижными осями x1O1 y1 ) является переносным, движение точки по ободу пластины (относительно подвижных осей xOy ) является относительным.
2. Определим положение кривошипов и точки на пластине в заданный
момент времени t1 2 с:
0,1 22 0,2 2 0,8 |
рад 45,8о ; O M S 0,25 22 /12 /12 м; |
||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
S / R |
|
|
|
|
|
|
|
рад 60щ . |
|
||||
|
|
|
|
|
|
||||||||
|
12 |
0,4 |
3 |
|
|
|
|||||||
3. Определим для заданного момента времени угловую скорость и |
|||||||||||||
угловое ускорение кривошипов: |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
0,4 |
|
|
|
2 |
||||
0,2 t 0,2 0,2 1 0,2 |
рад/с; 0,2 |
рад/с . |
|||||||||||
4. Применим для точки М и теорему сложения скоростей |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
a |
e |
r . |
(3.2.1) |
||||||||
Переносное движение точки М является поступательным, все точки |
|||||||||||||
полудиска на рисунке 3.6 имеют одинаковые скорости и ускорения. В
качестве переносной скорости е определяем скорость точки О:
е L 0,4 0,3 0,12 м/с; e O1O .
Относительная скорость точки М направлена касательно желобу и
равна по модулю
|
|
3,14 м/с. |
r S 0,5 t 0,5 2 |
||
Для определения абсолютной скорости точки проектируем векторное |
||
уравнение (3.2.1) на подвижные оси координат: |
||
aax e sin r |
sin 0,12 sin 45,8o |
3,14 sin 60o 2,81 м/с; |
ay e cos r |
cos 0,12 cos 45,8o |
3,14 cos 60o 1,65 м/с; |
a 
 ax2 ay2
ax2 ay2 
 ( 2,81)2 1,652 3,26 м/с.
( 2,81)2 1,652 3,26 м/с.
5.Воспользуемся теоремой сложения скоростей в случае поступательного переносного движения: