

5.Определение устойчивости системы по корням характеристического уравнения
Воспользуемся передаточной функцией замкнутой САР из пункта4.

 – характеристическое уравнение
– характеристическое уравнение
Используя ППП Matlab, получаем
>> w=tf([8.445e11 -1.3182645e12 4.97062566e11],[1.2893335e12 -2.01283213925e12 7.59002377371e11])
Transfer function:
8.445e011 s^2 - 1.318e012 s + 4.971e011
---------------------------------------
1.289e012 s^2 - 2.013e012 s + 7.59e011
>> pole(w)
ans =
0.9241
0.6370
Вывод.
Так как корни характеристическое
уравнение по модулю │z1
│,
│z2│
меньше 1, замкнутая САР частоты
 вращения
является устойчивой.
вращения
является устойчивой.
6.Определение устойчивости системы, используя аналог критерия устойчивости Михайлова
Для
анализа устойчивость импульсных САУ
воспользуемся характеристическим
уравнением
 замкнутой системы. Выполнив замену
замкнутой системы. Выполнив замену
 , получаем
уравнение кривой Михайлова
, получаем
уравнение кривой Михайлова
 (14)
(14)
Используя
Теорему Эйлера
 =
= ,
запишем (14):
,
запишем (14):

Задавая
частоту
 в интервале
от 0 доπ/Т
, строится в комплексной плоскости
в интервале
от 0 доπ/Т
, строится в комплексной плоскости
 кривая Михайлова
(рис.13)
кривая Михайлова
(рис.13)
w=0
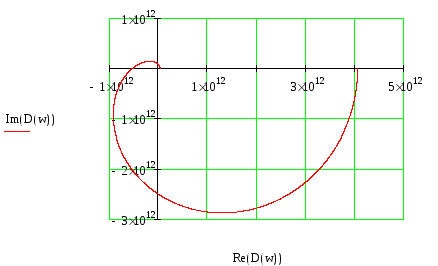
Рис. 13. Годограф Михайлова
Вывод.
Кривая Михайлова при
 =0 начинается
на положительной вещественной оси
(3.55*10^10) и заканчивается на вещественной
оси (4.061*10^12). Проходит поочередно, нигде
не обращаясь в ноль 2m=4
квадрантов. Следовательно, импульсной
САР частоты
=0 начинается
на положительной вещественной оси
(3.55*10^10) и заканчивается на вещественной
оси (4.061*10^12). Проходит поочередно, нигде
не обращаясь в ноль 2m=4
квадрантов. Следовательно, импульсной
САР частоты
 вращения является устойчивой.
вращения является устойчивой.
7.Построение дискретный выходной сигнал системы, его аппроксимации и определение показатели качества импульсной сар
Для определения показателей качества процесса регулирования импульсных САУ используется тот же подход, что и в линейных системах, но есть свой особенности. Выходной сигнал импульсной системы является непрерывным y(t), но, поскольку, в анализе систем используется дискретное преобразование Лапласа и фиктивный квантователь, можем принять, что выходной сигнал является дискретным y*(t) либо y[nT]. Имея дискретный сигнал и, выполнив его аппроксимацию, получаем непрерывный выходной. Используя импульсную передаточную функцию замкнутой САУ, можем записать: Y(z)=WЗС(z)G(z). Для получения y[nT] можно использовать либо формулу Хэвисайда, либо ряд Лорана. Более простой способ получения дискретного сигнала - использование программы Control System Toolbox the Matlab.
Воспользуемся параметрами системы и выражением передаточной функции непрерывной части и определим показатели качества импульсной САУ(рис.14):
>> Wn=tf([3.84],[56000 540 1])
Transfer function:
3.84
---------------------
56000 s^2 + 540 s + 1
>> Wnd=c2d(Wn,0.97)
Transfer function:
3.216e-005 z + 3.206e-005
-------------------------
z^2 - 1.991 z + 0.9907
Sampling time: 0.97
>> Woc=tf([68.198 47.58 1.3],[26.23 14.35 1])
Transfer function:
68.2 s^2 + 47.58 s + 1.3
------------------------
26.23 s^2 + 14.35 s + 1
>> Wocd=c2d(Woc,0.97)
Transfer function:
2.6 z^2 - 3.784 z + 1.22
------------------------
z^2 - 1.56 z + 0.5882
Sampling time: 0.97
>> Wz=feedback(Wnd,Wocd)
Transfer function:
3.216e-005 z^3 - 1.812e-005 z^2 - 3.111e-005 z + 1.886e-005
-----------------------------------------------------------
z^4 - 3.551 z^3 + 4.685 z^2 - 2.717 z + 0.5828
Sampling time: 0.97
>> pole(Wz)
ans =
0.9942 + 0.0083i
0.9942 - 0.0083i
0.9260
0.6367
>> step(Wz)
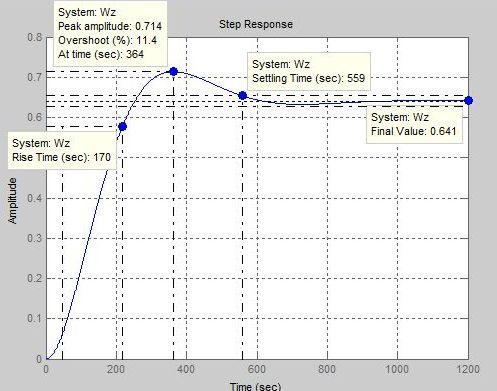
Рис.14.
Дискретный
сигнал и показатели
качества
импульсной
САР
частоты
 вращения
вращения
Время регулирования (минимальное время по истечению которого, регулируемая величина будет оставаться близкой к установившемуся значению)

Перерегулирование – это мах отклонение регулируемой величины от установившегося значения.

Число колебаний за время регулирования = 1
Время достижения 1 мах
 .
.