

2. Дифференциальное уравнение нелинейной системы
Дифференциальное уравнение гармонически линеаризованной нелинейной САУ с однозначной характеристикой имеет вид:
 (2)
(2)
Коэффициенты линеаризации имеет вид
 (3)
(3)
Используя уравнения (2) и (3), запишем дифференциальное и характеристическое уравнения гармонически линеаризованной системы, соответственно




3. Оценка устойчивости гармонически линеаризованной нелинейной системы методом Гольдфарба.
Анализ
устойчивости гармонически линеаризованной
нелинейной САУ проводится в 2 этапа. На
первом этапе принимают гипотезу, что в
системе существуют автоколебания и
![]() определяют
амплитуду
определяют
амплитуду и частоту этих
колебаний
и частоту этих
колебаний , а затем, на
втором этапе оценивается устойчивость
найденного периодического решения и
устойчивость нелинейной САУ. Для этих
целей используют метод Гольдфарба.
, а затем, на
втором этапе оценивается устойчивость
найденного периодического решения и
устойчивость нелинейной САУ. Для этих
целей используют метод Гольдфарба.
Основное уравнение метода гармонического баланса имеет вид

 (4)
(4)
где
 – передаточная
функция линейной части нелинейной САУ;
а
– передаточная
функция линейной части нелинейной САУ;
а – комплексный
коэффициент передачи гармонически
линеаризованного нелинейного элемента.
– комплексный
коэффициент передачи гармонически
линеаризованного нелинейного элемента.

 (5)
(5)
 (6)
(6)
Решая
уравнение (4) относительно
 и
и , можно определить
параметры автоколебаний. Гольдфарб
Л.С. предложил решать его графическим
способом, представив это уравнение как
, можно определить
параметры автоколебаний. Гольдфарб
Л.С. предложил решать его графическим
способом, представив это уравнение как
 (7)
(7)
где
 –обратная
характеристика
НЭ.
–обратная
характеристика
НЭ.


Переходим
в частотный диапазон и, используя ППП
Mathcad,
строим годограф АФЧХ
 и -
и - .
Результаты приведены на рис.4.
.
Результаты приведены на рис.4.
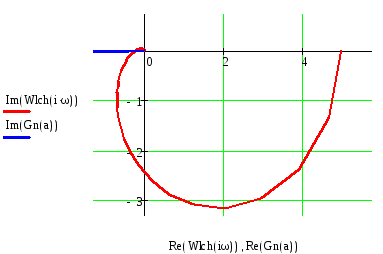
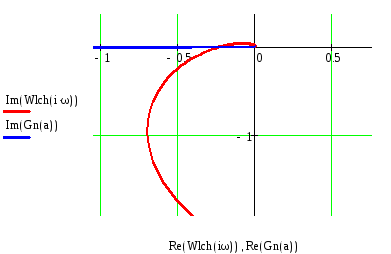
Рис.4. Годограф
АФЧХ
 и
и .
.
Вывод.
Графики пересекаются, следовательно,
есть общее решение уравнения (7), и
согласно формулировки метода Гольдфарба
найденное решение устойчивое и САР
частоты
 вращения ДПТ
устойчивая в большом.
вращения ДПТ
устойчивая в большом.
4. Построение переходной характеристики и определение по ней показатели качества гармонически линеаризованной нелинейной сар.
Принимаем начальные условия нулевыми.
В программном продукте MATLAB построим схему гармонически линеаризованной нелинейной САУ (рис.5)
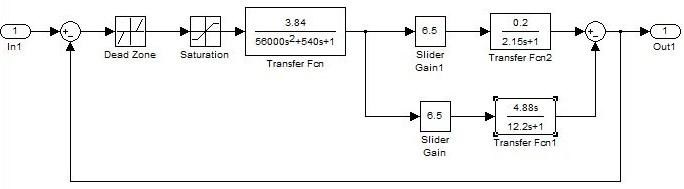
Рис.5. Схема гармонически линеаризованной нелинейной САУ в Simulink
Исследуем переходный процесс заданной системы подачей единичного ступенчатого входного сигнала (рис.6)
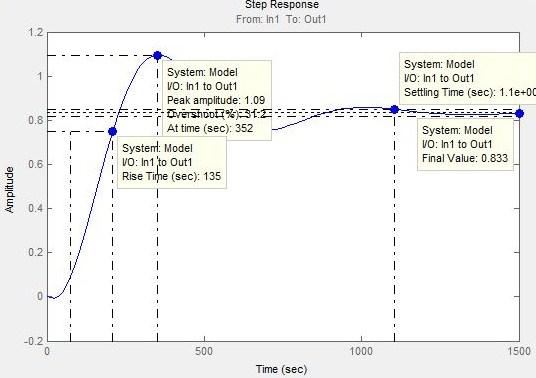
Рис.6. Переходный процесс заданной системы подачей единичного ступенчатого входного сигнала
Время регулирования (минимальное время по истечению которого, регулируемая величина будет оставаться близкой к установившемуся значению)

Перерегулирование – это мах отклонение регулируемой величины от установившегося значения.

Число колебаний за время регулирования = 1
Время достижения 1 мах

5. Исследование устойчивости положения равновесия системы в целом, используя критерий абсолютной устойчивости Попова в.М.
Для
того, чтобы положение равновесия
нелинейной САУ было абсолютно устойчивым,
необходимо чтобы весь годограф
видоизмененной частотной характеристики
линейной части Wл*
(ј
ω)
располагался справа от прямой, проведенной
под любым углом наклона
 , проходящую
через точку с координатами (- 1/
, проходящую
через точку с координатами (- 1/ ,j0).
Где
,j0).
Где
 - тангенс угла
наклона прямой, ограничивающей сектор
(0,
- тангенс угла
наклона прямой, ограничивающей сектор
(0, ).
).
Зададим параметры нелинейной характеристика тиристорного преобразователя (ТП):
Ктп=8; b=4; m=0,1.
Решение.
Построим нелинейную характеристику ТП с учетом ее параметров (рис.7).
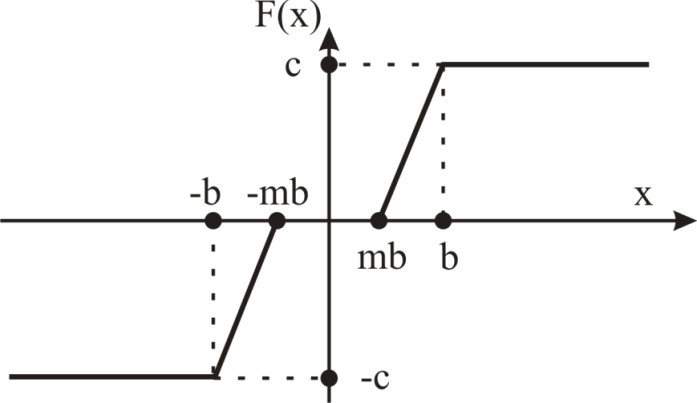
Рис.7. Нелинейная характеристика ТП
Воспользуемся передаточной функцией линейной части и параметрами системы

![]()
![]()
![]()

 .
.
Переходим в частотный диапазон и, используя Mathcad, строим годограф АФЧХ видоизмененной частотной характеристики линейной части Wл* (јω) и проставляем точку с координатами. [-0.128,0j]
Результаты приведены на Рис.8.
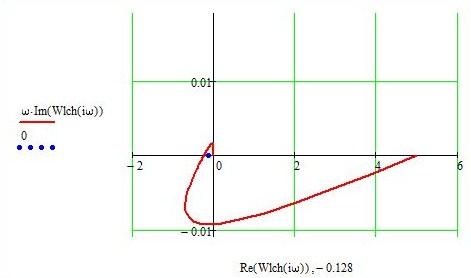
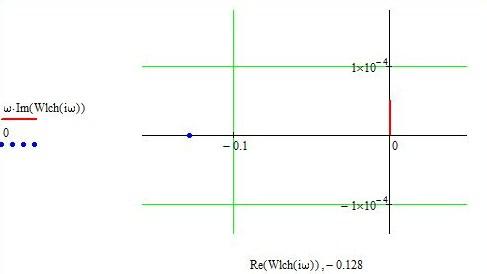
Рис.8. Использование Критерия Попова для оценки устойчивости системы
Вывод, условие критерия Попова не выполняется, так как не возможно провести прямую, чтобы весь годограф видоизмененной частотной характеристики линейной части Wл (јω) располагался справа от нее, но система может быть и устойчивой.