

1.3 Определение скоростей точек и звеньев механизма методом планов.
План скоростей – лучеподобная фигура (треугольник), показывающая направление и величины скоростей точек, которая строится на основе векторного уравнения
![]() .
.
Определение линейной скорости т. В.
VB=lAB;
где
– угловая скорость вращения кривошипа
(звена АВ),
=![]() ,
где n
– заданное число оборотов кривошипа,
тогда
,
где n
– заданное число оборотов кривошипа,
тогда
![]()
Расчет масштабного коэффициента скорости V:
![]()
Длина вектора скорости принимается самостоятельно.
На основании теоремы о сложении скоростей в сложном движении скорость т. С будет складываться из скорости VB переменного движения звена (1) и скоростью VСВ относительного движения звена (2) вокруг точки В:
![]()
Откладываем от полюса pV параллельно вектору скорости т. В отрезок pVВ и через его конец проводим прямую, являющуюся линией действия вектора VСВ. Эта прямая перпендикулярна линии ВС. Далее из полюса pV плана скоростей горизонтально проводим прямую и на пересечении её с линией действия VСВ отмечаем т. С и получаем вектор скорости VСВ и VC. Для 1 положения план скоростей показан на рис. 1.3.
Для кривошипно-коромыслового механизма план скоростей представляет собой треугольник, у которого каждая сторона перпендикулярна соответствующему звену механизма. Причем из полюса плана скоростей выходят два вектора: VA и VC.
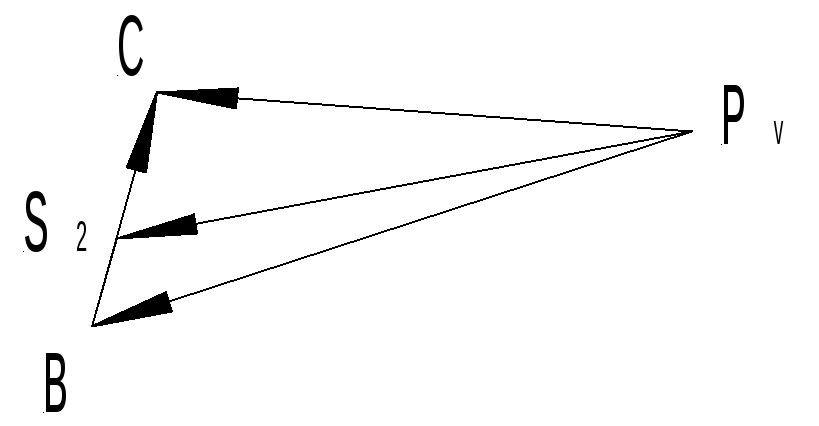
Рис. 1.3.
Для определения скорости т. С определяем отрезки pVC c планов скоростей:
VC=(pVC) V, где V – масштабный коэффициент скорости.
VC0=0 м/с; VС1=11,9 м/с; VС2=14,2 м/с; VС3=9,8 м/с;
VС4=0 м/с; VС5=6,69 м/с; VС6=12,87 м/с; VС7=16,36 м/с.
1.4 Определение ускорений точек и звеньев механизма методом планов.
Для построения плана ускорений полностью применимы рассуждения, использованные при отыскании скоростей звеньев и точек, поэтому записываем векторное уравнение для т. С:
![]() (*)
В
уравнении (*) можем найти
(*)
В
уравнении (*) можем найти
![]() следовательно,
неизвестными являются:
следовательно,
неизвестными являются:
![]() ,
,![]() ,
,![]() ,
где
,
где![]()
Зная
скорость VB
(п. 1.3), равную 14,13 м/с и lAB
=0,15 м, найдем
центростремительное ускорение точки
В:![]() .
.
![]()
![]() ;
;
![]() ,
,
![]() .
.
Выберем масштабный коэффициент ускорения a:
![]()
Длину вектора ускорения принять самостоятельно.
Решаем графически уравнение (*), т.е. строим план ускорений для выбранного положения механизма, (рис. 1.4).
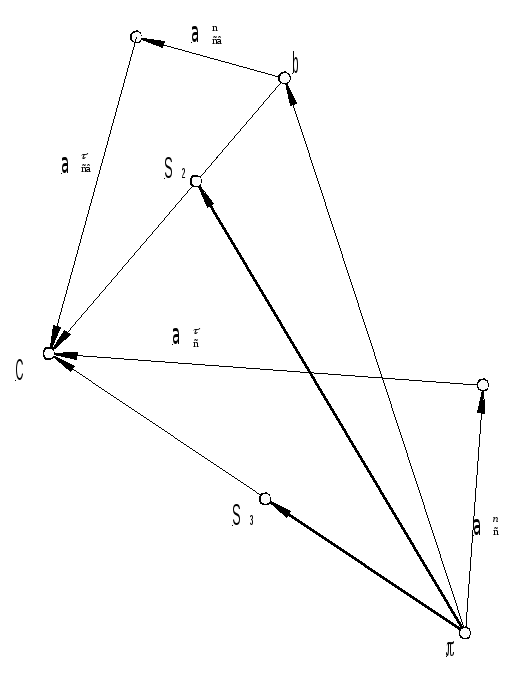
Рис. 1.4.
Откладываем
от полюса
параллельно
вектору ускорения
![]() (параллельно звену AB)
отрезок В
равный 133,1 мм
(параллельно звену AB)
отрезок В
равный 133,1 мм
![]() .
Нормальное ускорение
.
Нормальное ускорение
![]() точкиС
в относительном движении направлено
от т. C
вдоль звена ВС
к т. B,
поэтому из т. B
плана ускорений проводим линию
действия ускорения
точкиС
в относительном движении направлено
от т. C
вдоль звена ВС
к т. B,
поэтому из т. B
плана ускорений проводим линию
действия ускорения
![]() (параллельно звену 2) и в направлении
от точкиC
к точке B
откладываем отрезок
(параллельно звену 2) и в направлении
от точкиC
к точке B
откладываем отрезок
![]() равный 35,4 мм.
равный 35,4 мм.
![]() .
Из конца вектора
.
Из конца вектора
![]() перпендикулярно звенуВС
механизма
проводим линию действия тангенциального
ускорения
перпендикулярно звенуВС
механизма
проводим линию действия тангенциального
ускорения
![]() .
.
Далее
из полюса откладываем ускорение
![]() =56,74
мм
=56,74
мм
![]() .параллельно
звенуСDдля
выбранного положения механизма.
Ускорение
.параллельно
звенуСDдля
выбранного положения механизма.
Ускорение
![]() направлено
изСвD.Из
конца вектора
направлено
изСвD.Из
конца вектора
![]() перпендикулярно звенуСD
механизма
проводим линию действия тангенциального
ускорения
перпендикулярно звенуСD
механизма
проводим линию действия тангенциального
ускорения
![]() ,
пересечение линии действия
тангенциального ускорения
,
пересечение линии действия
тангенциального ускорения![]() с линией действия тангенциального
ускорения
с линией действия тангенциального
ускорения![]() даёт точкуС.
даёт точкуС.
Соединив т. Сс полюсом ускорений, получим ускорение точкиС–С, а соединив точкиВиСполучим ускорение звена 2 –ВС.
Определение ускорений для выбранного положения:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Векторы
![]()
![]() исходят
из точкиπ ,
а их длины , положение т.
исходят
из точкиπ ,
а их длины , положение т.![]() (
(![]() лежит наВС,
лежит наВС,![]() лежит наπС)
определяют из соотношений:
лежит наπС)
определяют из соотношений:
![]() .
.
Положение т. S2на (BC) определяем следующим образом:
![]() ;
;![]() ;
;
![]() .
.