

Downloads_1 / 2y_semestr_Lektsia_03
.pdf1й курс. 2й семестр. Лекция 3 |
1 |
Лекция 3. Закон сохранения момента импульса.
Момент силы. Момент импульса материальной точки и механической системы. Уравнение моментов механической системы. Закон сохранения момента импуль- са механической системы.
Математические сведения.
Векторным произведением двух (ненулевых) векторов a = (ax ,ay ,az ) и
b = (b ,b ,b ) |
называется вектор s = a × b , который в декартовой системе координат |
|||||||||||||||||||||||||||||||||||||||
x |
y |
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(с ортами e |
, e , e |
|
) задается соотношением |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
x |
|
y |
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
c = |
|
|
|
ex |
ey |
ez |
|
= e (a b - a |
|
|
|
) + e |
(a b - a |
|
|
) + e |
(a |
|
|
- a b ) . |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
a |
x |
a |
y |
a |
z |
|
b |
y |
|
b |
b |
y |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
y z |
|
z |
|
|
y |
z x |
x z |
z |
x |
|
|
y x |
||||||||||||
|
|
|
|
|
|
|
|
|
|
bx |
by |
bz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Величина |
|
|
= |
|
× |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
c |
a |
|
b |
|
sin a (площадь прямоугольника на векторах a |
и b ). |
|||||||||||||||||||||||||||||||||
Свойства векторного произведения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1) Вектор c |
направлен перпендикулярно к плоскости векторов a |
и b . Поэтому |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
для любого вектора d , лежащего в плоскости (линейно независимых) векторов a |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
и b (т.е. d |
= l1a + l2b ), получаем (c ,d ) = 0 . Следовательно, если два ненулевых век- |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
тора a |
и b параллельны, то c |
= a |
´b = |
0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
2) Производная по времени от векторного произведения – |
это вектор |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
db |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(a ´b ) |
= |
da |
´b + a ´ |
. |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, e |
dt |
|
|
dt |
|
|
|
|
|
|
|
|
|||||
Действительно, (базисные векторы e |
|
, |
e |
- постоянные) |
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
y |
z |
|
|
|
|
|
|
|
|
|
|
|
dtd (a ´b ) = dtd (ex (aybz - azby ) + ey (azbx - axbz ) + ez (axby - aybx )) =
=ex (aɺybz + aybɺz - aɺzby - azbɺy ) + ey (aɺzbx + azbɺx - aɺxbz - axbɺz ) + ez (aɺxby + axbɺy - aɺybx - aybɺx ) =
=ex (aɺybz - aɺzby ) + ey (aɺzbx - aɺxbz ) + ez (aɺxby - aɺybx ) + ex (aybɺz - azbɺy ) + ey (azbɺx - axbɺz ) +
|
|
|
ex |
ey |
ez |
|
|
|
ex |
ey |
ez |
|
|
|
|
|||
|
|
|
|
|
|
|||||||||||||
|
ɺ |
ɺ |
|
|
|
|
|
|
|
|
|
|
|
|
|
da |
db |
|
+ez (axby |
- aybx ) = |
ax |
ay |
az |
|
+ |
|
ax |
ay |
az |
|
= |
|
´b + a ´ |
|
|||
|
|
|
ɺ |
ɺ |
|
ɺ |
|
|
|
|
|
|
|
|
|
dt |
|
dt |
|
|
|
b |
b |
|
b |
|
|
|
ɺ |
ɺ |
ɺ |
|
|
|
|||
|
|
|
y |
|
|
|
b |
b |
y |
b |
|
|
|
|
|
|||
|
|
|
x |
|
z |
|
|
|
x |
|
z |
|
|
|
|
|
||
Вектор момента импульса
Вектором момента импульса относительно точки О называется вектор
|
p |
|
|
|
|
|
|
L |
= R ´ p , |
|
|
L |
|
|
|
p = mv - вектор импульса точ- |
|
R |
где R - радиус-вектор из точки О, |
||||
|
|
|
|
|
|
|
|
ки. Величина момента импульса - кг×м2/с. Вектор L направлен |
|||
|
|
|
|
|
|
|
|
перпендикулярно к плоскости векторов R и |
p . Точку О иногда |
||
Oназывают полюсом. Найдем производную от вектора момента импульса по времени

|
|
|
|
|
|
|
1й курс. 2й семестр. Лекция 3 |
|
|
|
|
|
|
|
2 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dL |
= |
dR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
dt |
dt |
× p |
+ R × |
. |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Первое слагаемое в правой части: dR × p = v × (mv) = |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
0 . Так как в инерциальной сис- |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
теме отсчета по второму закону Ньютона (в импульсной форме) dp = F , то второе |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
слагаемое имеет вид R × dp = R × F . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Величина M O (F ) = R × F называется вектором момента силы F относитель- |
|
|
|
||||||||||||||||||||||
но точки О. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Окончательно получаем: dL |
|
|
|
- производная от вектора момента импульса |
|
|
||||||||||||||||||||
= M O |
(F ) |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
относительно точки равна моменту действующих сил относительно этой точ- |
|
|
|
|||||||||||||||||||||||
ки. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Свойства вектора момента силы. |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1) M O (F ) R и M O |
(F ) F . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
2) В декартовых координатах |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
ex |
ey |
ez |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
M O (F ) = x y z = ex ( yFz − zFy ) + ey ( zFx − xFz ) + ez (xFy − yFx ) . |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
Fx |
Fy |
Fz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
или |
M O |
= M Ox |
+ M Oy |
+ M Oz |
- вектор момента силы относительно точки равен сумме |
|
|
|
||||||||||||||||||
моментов силы относительно координатных осей. |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3) Момент суммы сил равен сумме моментов каждой из сил M O |
∑ Fi |
= ∑ M O (Fi ) . |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4) Сумма моментов сил относительно точки ∑ MO (Fi ) = ∑ Ri |
× Fi при переходе к |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
другой точке О1 , при котором Ri |
= Ri1 + R1 |
изменится по правилу |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
∑ M O |
(Fi ) = ∑(Ri1 |
+ R1 )× Fi = |
∑(Ri1 |
× Fi |
) + ∑(R1 |
× Fi |
) = M O1 |
+ R1 × |
|
∑ Fi |
||||||||||
|
|
|
|
|
i |
|
|
|
|
i |
|
|
|
|
|
i |
|
i |
|
|
|
|
|
i |
|
|
|
|
|
|
R|| |
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Следовательно, момент сил не изменится, если ∑ Fi |
= 0 . |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
R |
|
R |
5) Пусть R = R + R|| , где R F , |
R|| || F тогда |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
O |
|
M O (F ) = R |
× F |
= R × F . |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
Следовательно, если две одинаковые силы лежат на од- |
|
|
|
|||||||||||||||||
ной прямой, то их моменты одинаковые. Эта прямая называется линией действия |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
силы F . Длина вектора R |
называется плечом силы относительно точки О. |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
Момент силы относительно оси. |
|
|
|
|
|
|
|
|
||||||||||||
Как следует из определения момент силы, координаты вектора моменты силы относительно координатных осей определяются формулами

|
1й курс. 2й семестр. Лекция 3 |
3 |
|
|
|
|
- yFx . |
M Ox (F ) = yFz |
- zFy , M Oy (F ) = zFx |
- xFz , M Oz (F ) = xFy |
|
Рассмотрим метод нахождения момента силы относительно некоторой оси z. Для этого надо рассмотреть вектор момента силы относительно некоторой точ-
|
|
|
|
|
ки О на этой оси и найти проекцию вектора |
|
M |
|
|
|
момента силы на эту ось. |
|
|
|
|
|
|
|
|
|
|
|
Момент вектора силы F относительно точки |
|
|
|
|
|
О можно найти следующим образом. Проведём |
|
О |
R |
α |
F |
плоскость π, в которой лежит вектор силы и |
|
R |
|
|
||
π |
|
|
точка О. Тогда вектор момента силы M будет |
||
|
|
|
|||
|
|
|
|
|
приложен в точке О и направлен перпендику- |
лярно этой плоскости. Величина момента силы M O = RF sin a = R F , где R = R sin α - плечо силы относительно точки О.
|
|
|
|
|
|
|
|
|
Чтобы найти момент силы F относи- |
|
|
z |
тельно произвольной оси z, надо: |
|
|
F |
1) |
|
|
|
|
найти проекцию силы F на любую |
||
|
|
|
||
l |
|
О |
p |
плоскость π перпендикулярную этой |
|
оси и указать точку О - точку пересе- |
|||
F |
|
А |
|
|
|
|
чения этой плоскости с осью z; |
||
|
|
|
|
|
|
|
Mk |
2) |
|
|
|
найти плечо силы F относительно |
||
|
|
|
|
оси – т.е. расстояние от линии действия |
|
|
|
|
проекции силы l (в плоскости π) до |
точки О;
3) найти величину момента силы M k = F × OA и направление по правилу правого
винта (буравчика).
Правило правого винта в данном случае: вектор момента силы вдоль оси на-
правлен так, что вектор F задает вращение в плоскости π вокруг точки О по часовой стрелке.
4)Если на оси z указано положительное направление (говорят, что ось ориентирована), то указать знак проекции момента силы.
Момент импульса механической системы.
Рассмотрим суммарный момент импульса системы точек (тела) относительно некоторой точки О.
|
|
|
´ pi |
L |
= ∑ Li |
= ∑ Ri |
|
|
i |
i |
|
При переходе к другой точке О1 радиус-векторы точек системы преобразуются
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ri |
= R1i |
+ R1 , поэтому |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
= ∑(R1i |
+ R1 )´ pi |
= ∑(R1i ´ pi |
+ R1 ´ pi ) |
= ∑ R1i |
´ pi |
+ R1 ´ |
∑ pi |
|||||
|
|
|
i |
|
|
i |
|
|
|
i |
|
|
|
i |
|
Суммарный импульс системы равен импульсу центра масс ∑ pi |
= pC |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
L |
= L |
+ R |
´ p . |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
C |
|
|
|
|
|
|

|
|
|
|
|
1й курс. 2й семестр. Лекция 3 |
|
|
|
|
|
|
|
4 |
|
|||||
Поэтому в системе отсчета, где центр масс тела покоится p |
= 0 , суммарный мо- |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
мент импульса не зависит от точки, относительно которой он вычисляется. |
|
|
|||||||||||||||||
|
Если рассматривается движение твердого тела, то возможное движение в |
|
|
||||||||||||||||
случае p |
= 0 – это вращение вокруг центра масс. В этом смысле момент импуль- |
|
|||||||||||||||||
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
са описывает вращательное движение системы (тела). |
|
|
|
|
|
|
|
|
|||||||||||
|
Найдем производную от суммарного момента импульса |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
dp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dL |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
= ∑ Ri × |
i = ∑ Ri × Fi . |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
i |
|
dt |
i |
|
|
|
|
|
|
|
|
|
|
|
Силы, действующие на точки системы, разделим на внутренние, действующие |
|
|
|||||||||||||||||
между точками системы и внешние – |
со стороны тел, не входящих в систему: |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
= F ВНУТР |
+ F ВНЕШ . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
i |
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
dL |
= ∑ Ri |
× (Fi |
ВНУТР + Fi ВНЕШ ) = ∑ Ri × Fi ВНУТР +∑ Ri |
× Fi ВНЕШ . |
|
|
|
|
|||||||||
|
|
dt |
i |
|
|
|
|
i |
|
|
i |
|
|
|
|
|
|
|
|
Внутренние силы подчинятся третьему закону Ньютона - они лежат на прямых |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
линиях, попарно соединяющих точки, |
|
|
|||||||||
|
|
|
z |
|
|
|
|
противоположны по направлению и оди- |
|
|
|||||||||
|
|
|
|
|
|
|
|
наковы по величине |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ВНУТР . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
ВНУТР = −F |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
j |
|
|
|
|
|
|
|
|
|
|
|
|
Для каждой из таких пар сил можно вве- |
|
|
|||||||||
|
|
|
|
|
pi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ri |
|
|
|
сти одинаковое плечо Rij , поэтому |
|
|
||||||||||
|
|
|
|
|
|
|
|
× (F |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
mi |
|
∑ Ri |
× Fi ВНУТР = ∑(R ij |
× Fi |
ВНУТР + R ij |
× Fj ВНУТР ) = |
∑ R ij |
||||||
|
|
|
|
|
|
|
|
i |
|
i |
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Окончательно |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ВНЕШ ) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
βi |
αi |
|
|
|
|
|
dL |
= ∑ Ri × Fi ВНЕШ = ∑ MO |
(Fi |
|
|
||||||
|
Li |
ri |
|
|
|
|
dt |
i |
|
|
|
|
i |
|
|
|
|
||
|
|
|
|
|
|
Уравнение динамики вращательного дви- |
|
||||||||||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
O |
|
|
|
|
жения системы точек |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
dL |
= ∑ MO |
(Fi ВНЕШ ) . |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
dt |
i |
|
|
|
|
|
|
|
|
Производная от вектора суммарного момента импульса системы равна вектор- |
|
||||||||||||||||||
ной сумме моментов внешних сил, действующих на систему. |
|
|
|
|
|
|
|||||||||||||
Покоординатное равенство |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
dLx |
|
|
dLy |
|
|
dLz |
|
|
|
= ∑ M Ox (Fi |
ВНЕШ ) , |
= ∑ MOy (Fi |
ВНЕШ ), |
= ∑ M Oz (Fi |
ВНЕШ ). |
||||
dt |
dt |
dt |
|||||||
i |
|
i |
|
i |
|
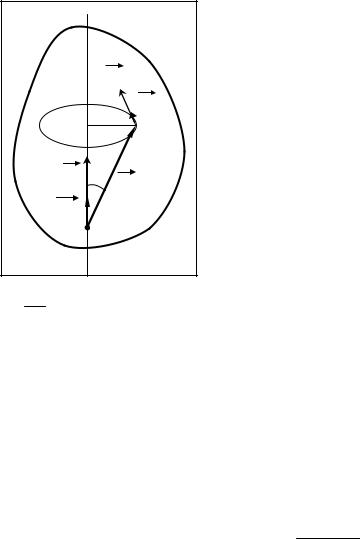
Момент импульса твердого тела.
Рассмотрим твердое тело, которое вращается вокруг неподвижной оси z с угловой скоростью ω. Выделим в теле малую частицу массой mi. Найдем момент импульса этой частицы относительно некоторой точки О на оси вращения. Если радиус-вектор частицы ri , вектор импульса pi , то вектор момента импульса час-

|
|
|
1й курс. 2й семестр. Лекция 3 |
|
5 |
|||||
|
|
|
|
|
|
|
|
|
|
и |
тицы L |
= r |
´ p приложен к точке О и направлен перпендикулярно к векторам r |
||||||||
i |
i |
i |
|
|
|
|
|
|
i |
|
pi , т.е. под некоторым углом βi к оси z. Траекторией частицы Dmi является ок- |
|
|||||||||
ружность, поэтому вектор импульса p |
направлен по касательной к этой окружно- |
|||||||||
|
|
|
|
|
i |
|
|
|
|
|
сти. Следовательно, угол между векторами r |
и p |
равен 900 (как угол между обра- |
||||||||
|
|
|
|
|
|
i |
|
i |
|
|
зующей и направляющей конуса). Тогда величина момента импульса частицы |
|
|||||||||
Li = ri pi . |
|
|
|
|
|
|
|
|
|
|
Пусть ri - радиус окружности – |
траектории частицы. Тогда |
|
||||||||
pi = Dmi vi = Dmi × ri w. Рассмотрим проекцию вектора момента импульса на ось z: |
|
|||||||||
Liz = Li cos bi . |
|
|
|
|
|
|
|
|
||
Учитывая, что cos bi = sin ai , получаем: |
|
Liz = ri pi cos bi |
= ri Dmi × ri wsin ai . |
|
||||||
Но ri = ri sin ai . Тогда |
|
|
|
|
|
|
|
|
||
|
|
|
|
L |
= Dm × r |
2w |
|
|
|
|
|
|
|
|
iz |
|
i i |
|
|
|
|
Для всего тела Lz = ∑ Liz |
= ∑Dmi × ri |
2w = w∑Dmi |
× ri |
2 . |
|
|
||||
|
|
i |
i |
|
|
i |
|
|
|
|
В это выражение входят параметры движения частиц, которые не зависят от положения точки О. Поэтому величина момента импульса вдоль оси z не зависит от положения точки на оси, для которой она вычисляется. В этом выражении величина
I z = ∑ Dmi × ri 2
i
называется моментом инерции твердого тела относительно оси z (единица измерения кг×м2). Для сплошных тел суммирование можно заменить интегралом по массе тела
I z = ∫∫∫ r 2 dm .
m
Уравнение динамики вращательного движения твердого тела вокруг неподвижной оси.
Момент импульса твердого тела при вращательном движении вокруг оси z вычисляется как
Lz = Iz w .
Тогда уравнение динамики вращательного движения примет вид:
dLz = d (I z w) . dt dt
Если тело твердое, то I z = const , поэтому, с учетом того, что dw = e (угловое уско-
dt
рение), получаем выражение
I z e = M zВНЕШ
Это уравнение динамики вращательного движения твердого тела вокруг неподвижной оси:
угловое ускорение вращательного движения твердого тела вокруг неподвижной оси прямо пропорционально величине момента внешних сил относительно этой оси.

1й курс. 2й семестр. Лекция 3 |
6 |
Замечание. По аналогии со вторым законом Ньютона, в котором ускорение определяется силой, уравнение динамики вращательного движения твёрдого тела дает связь между угловым ускорением и моментом силы. В этом смысле момент инер-
ции тела играет роль меры инертности при вращательном движении.
z
r
 dr
dr
Примеры вычисления моментов инерции.
1) Момент инерции тонкого кольца (прямого тонкостенного цилиндра) массы m и радиуса R относительно оси z, перпендикулярной плоскости кольца, проходящей через центр кольца
I z = ∑ Dmi × ri 2 = R2 ∑Dmi = mR2 .
i |
i |
2) Момент инерции диска (сплошного цилиндра) массы m и радиуса R относительно оси z, перпендикулярной к плоскости диска, проходящей через центр диска (сплошного цилиндра). Выделим тонкий цилиндр радиусом r и толщиной dr.
Масса этого цилиндра dm = |
m |
2prdr = |
m |
2rdr , r = r . |
|||||||||||||
pR2 |
R2 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Поэтому I z |
= |
R r2 |
m |
2rdr = |
2m |
R r3dr = |
2m |
|
R4 |
|
= |
mR2 |
|
||||
R2 |
|
R2 4 |
|
||||||||||||||
|
|
∫ |
|
R2 |
∫ |
|
2 |
|
|||||||||
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
z |
X |
|
|
x |
dx |
3) Момент инерции тонкого стержня относительно оси z,
являющейся срединным перпендикуляром. Масса стержня m, длина L.
Выделим на расстоянии x от оси маленькую часть стержня длиной dx.
Масса этой части dm = |
m |
dx и r = x . Поэтому |
|
|
|
|||||||
|
|
|
|
|||||||||
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
L 2 |
|
m |
|
m 2L3 |
|
mL2 |
|
||
|
|
I z |
= ∫ |
x2 |
dx = |
= |
. |
|||||
|
|
|
|
|
|
|
||||||
|
|
|
3L 8 |
|
||||||||
|
|
|
− L 2 |
|
L |
12 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
4) Момент инерции тонкостенного шара относительно любой оси симметрии z.
|
|
|
|
|
|
|
z |
|
|
|
|
|
Масса шара m, радиус R. |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выделим на поверхности сферы кольцевой сегмент, |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
для которого ось z является осью симметрии. Сегмент |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
опирается на малый центральный угол dϕ, положение сег- |
||||
|
|
|
|
|
|
|
|
djj |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
мента определяется углом ϕ, отсчитываемым от плоскости |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
экватора, перпендикулярной оси z. |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда радиус кольца r = R cos j, |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
его масса dm = |
m |
2pR cos j× Rdj , поэтому |
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4pR2 |
|
|
|
|
|
|
π 2 |
(R cos j)2 |
m |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
I z |
= ∫ |
|
2pR cos j× Rdj или |
|
|
||||||||||||
4pR |
2 |
|
|
||||||||||||||
|
|
|
|
−π 2 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
π 2 |
|
|
|
|
|
|
|
π 2 |
|
|
I z |
= |
m |
R2 |
∫ |
(cos j)2 cos j× dj = |
m |
R2 ∫ (1- sin2 j)d (sin j) |
||||||||||
|
|
||||||||||||||||
|
|
2 |
|
|
−π 2 |
|
|
|
2 |
−π 2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||

|
|
|
|
|
1й курс. 2й семестр. Лекция 3 |
7 |
||||||
|
|
|
|
|
|
|
|
|
|
|
I z |
= 2 mR2 . |
|
|
z1 |
a |
z2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
5) Момент инерции сплошного шара относительно |
|||||||
|
|
|
r i |
|
|
любой оси симметрии z. Масса шара m, радиус ша- |
||||||
|
|
|
|
|
ра R. |
|
|
|
|
|
||
|
|
R1i |
R2i |
|
|
|
Представим шар как набор вложенных друг в |
|||||
|
|
|
друга тонкостенных сфер переменного радиуса r и |
|||||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
толщиной dr. Масса одной такой сферы |
||||||
|
x1 |
y1 |
y2 |
|
dm = |
4 |
m |
4pr 2 × dr = 3m3 r2 |
× dr . |
|||
|
|
x2 |
|
|
|
pR3 |
|
R |
|
|||
|
|
|
|
|
|
|
3 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Момент инерции такой сферы |
||||||
dI |
z |
= 2 dm × r 2 = 2 3m r2 |
× dr × r2 = 2m r4 × dr . |
|
|
|
|
|||||
|
3 |
3 R3 |
|
R3 |
|
|
|
|
|
|
|
|
Поэтому |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
I z |
= R |
2m r4 dr = 2m R5 |
= 2 mR2 . |
||||
|
|
|
|
|
|
∫ |
R3 |
|
|
R3 5 |
5 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
Теорема Гюйгенса-Штейнера
Как связаны между моменты инерции твердого тела относительно двух па-
раллельных осей?
Рассмотрим две параллельные оси z1 и z2. Введем две системы координат так, чтобы их оси х и у были параллельны друг другу, причем вторая система координат была получена параллельным переносом из первой на вектор, перпендикулярный осям z1 и z2 a = (ax ,ay ,0). Тогда расстояние между осями будет равно
a = 
 ax2 + a2y .
ax2 + a2y .
В этом случае координаты любой i-й малой частицы тела связаны соотношениями
|
|
x2i = x1i + ax , y2i = y1i + ay , z2i = z1i . |
|
|||
Квадрат расстояния от этой точки до первой оси z1: r 2 |
= x2 |
+ y2 |
||||
|
|
|
|
1 i |
1i |
1i |
и до второй оси z2 r 2 |
= x2 + y |
2 . |
|
|
|
|
|
2 i |
2i |
2i |
|
|
|
Вычисляем момент инерции относительно второй оси: |
|
|
||||
|
|
I z 2 = ∑ Dmi × r2i 2 = ∑ Dmi ×( x22i + y22i ) , |
|
|||
|
|
|
i |
i |
|
|
I z 2 = ∑ Dmi ×( x12i + y12i ) + ∑ Dmi ×(ax2 + ay2 ) + 2∑ Dmi ×( x1i ax + y1i ay ) . |
|
|
||||
i |
i |
|
|
i |
|
|
В этом равенстве |
|
|
|
|
|
|
∑ Dmi ×( x12i |
+ y12i ) = ∑ Dmi |
× r12i = Iz1 |
- момент инерции тела относительно оси z1, |
|||
i |
i |
|
|
|
|
|
∑ Dmi ×(ax2 + ay2 ) = a2 ∑ Dmi = ma2 , |
|
|
|
|||
i |
i |
|
|
|
|
|
∑ Dmi ×( x1i ax + y1i ay ) = ∑ Dmi ×x1i ax + ∑ Dmi ×y1i ay = ax ∑ Dmi ×x1i + ay ∑ Dmi ×y1i .
i |
i |
i |
i |
i |
Учтём, что ∑ Dmi ×x1i |
= mx1C |
и ∑ Dmi ×y1i = my1C |
(где x1С и y1С – |
координаты центра масс |
i |
|
i |
|
|
тела в 1й системе координат) и получим
I z 2 = I z1 + ma2 + 2m (ax x1C + ay y1C )

|
|
1й курс. 2й семестр. Лекция 3 |
|
8 |
||
Если предположить, что ось z1 проходит через центр масс тела, то x1С =0 и y1С =0, |
||||||
поэтому в этом случае выражение упрощается: |
|
|
|
|||
|
|
I z = I zC + ma2 . |
|
|
|
|
Это выражение носит название теоремы Гюйгенса-Штейнера: момент инерции |
||||||
твердого тела относительно произвольной оси равен сумме момента инерции |
||||||
тела относительно параллельной оси, проходящей через центр масс тела и квад- |
||||||
рата расстояния между осями, умноженного на массу тела. |
||||||
z |
zC |
Пример. Момент инерции стрежня относительно оси, проходя- |
||||
щей через край стержня, перпендикулярно ему, равен сумме |
||||||
|
|
|||||
|
|
момента инерции относительно срединной оси и массе, умно- |
||||
|
L/2 |
женный на квадрат половины длины стержня: |
||||
|
I z = I zC + m L2 |
= Lm2 |
+ mL2 |
= mL2 . |
||
|
|
|||||
|
|
4 |
12 |
4 |
3 |
|
Пример. Рассмотрим движение грузов на невесомой нерастяжимой нити, перекинутой через блок (диск). Массы грузов m1 и m2 (m1 < m2), масса блока m. Трения в оси блока нет. Нить не скользит по блоку. Силами сопротивления в воздухе пренебрегаем. Найти ускорение грузов. Радиус блока R.
mРешение. Фиксируем систему отсчета, в которой ось блока неподвижная. Предполагаем, что эта система отсчета инерциальная. Ось z системы координат в этой системе отсчёта направим вдоль оси вращения блока («от нас»).
«Мысленно» разбиваем систему на части и находим силы между
m1 |
|
|
|
m2 |
частями системы в соответствие со вторым и третьим законами |
|
|
|
|||
|
|
|
|
||
|
|
|
|
|
Ньютона. |
|
|
|
|
|
При этом учтём, что нить невесомая (масса любой части нити равна нулю), поэтому, если кусок нити движется под действием (растягивающих) сил, то из второго закона Ньютона
|
|
|
m a |
= F |
+ F |
НИТИ |
2 |
1 |
следует при mНИТИ=0, что эти силы равны по величине F2=F1.
|
|
|
|
|
|
|
|
Нить является нерастяжимой, поэтому ускорения всех |
|
|
|
|
|
N |
|
|
точек нити одинаковые по величине. Следовательно, |
|
|
|
|
|
|
|
||
|
|
|
|
z |
|
|
|
ускорения грузов одинаковые по величине. |
|
|
|
|
|
|
|
Нить не скользит по блоку – это значит, что скорости |
|
T′′′1 |
|
|
T′′′2 |
|||||
|
|
точек обода диска равны скоростям (соответствующих) |
||||||
T′′1 |
|
|
|
|
|
T′′2 |
||
|
|
mg |
|
точек нити. Следовательно, их тангенциальные ускоре- |
||||
|
||||||||
|
|
|
|
|
|
ния тоже одинаковые. |
||
|
|
|
|
|
|
|
|
|
T′1 |
|
|
|
|
|
T′2 |
Из всего этого следуют уравнения: |
|
|
|
|
|
|
- равенства соответствующих сил натяжения |
|||
|
|
|
|
|
|
|
|
|
T1 |
T2 |
T1 = T1′ = T1′′= T1′′′ , T2 = T2′ = T2′′= T2′′′ , |
||||||
a1 |
|
|
|
|
|
|
a2 |
- равенства ускорений |
|
|
|
|
|
|
|||
|
|
|
|
a1 = a2 = εR , |
||||
|
|
|
|
|
|
|
m2g |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
m1g |
|
- равновесия оси блока |
||||||
|
|
|
|
|
|
|
|
N − mg − T1 − T2 = 0 |
|
|
|
|
|
|
|
|
|

1й курс. 2й семестр. Лекция 3 |
9 |
- динамики центров масс грузов
m1a1 = T1 − m1 g m2 a2 = m2 g − T2
- динамики вращательного движения блока вокруг оси z
I z ε = T2 R − T1R .
Обозначим величину ускорения грузов как а.
В данном случае момент инерции блока (диска) относительно оси вращения
2
I z = mR , поэтому из уравнения динамики вращательного движения
2
mR2 a = (m2 g − m2 a) R − (m1 g + m1a ) R
2 R
находим a = |
|
(m2 − m1 ) g |
|
. |
|
|
m |
+ m + m |
|
||
|
|
||||
|
|
2 |
2 1 |
||
|
|
|
|
||
Закон сохранения момента импульса.
Уравнение динамики вращательного движения системы точек
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dL |
|
|
|
|
|
|
|
|
|
|
|
|
|
= ∑ MO (Fi |
ВНЕШ ) . |
|
|
|
||
|
|
|
|
|
dt |
|
|
|
||||
|
|
|
|
|
|
i |
|
|
|
|
|
|
Покоординатное равенство |
|
|
|
|
|
|
|
|
|
|||
|
dLx |
|
|
|
|
|
|
dLz |
|
|
||
|
= ∑ M Ox (Fi |
ВНЕШ ) , |
dLy |
= ∑ MOy (Fi |
ВНЕШ ), |
= ∑ M Oz (Fi |
ВНЕШ ). |
|||||
|
dt |
|
dt |
|||||||||
|
i |
|
|
dt |
|
i |
|
|
i |
|
||
1) Если момент внешних сил, действующих на систему, относительно некоторой точки равен нулю, то сохраняется момент импульса системы относительно этой точки:
|
|
|
|
dL |
|
|
|
= ∑ MO (Fi |
ВНЕШ ) |
||
dt |
|||
i |
|
=0 L = const .
Например, при движении планет в гравитационном поле Солнца, сохраняется вектор момента импульса планеты относительно Солнца, т.к. линия действия силы гравитации проходит через Солнце, поэтому её момент равен нулю относительно Солнца.
2) Если момент внешних сил, действующих на систему, относительно некоторой оси равен нулю, то сохраняется момент импульса системы вдоль этой оси:
|
|
|
|
dLz |
= ∑ M Oz (Fi |
ВНЕШ ) = 0 |
Lz = 0 . |
|
|||
dt i |
|
|
|
Пример. Волчок будет вращаться достаточно долго при малой силе трения, сохраняя тем самым момент импульса вдоль вертикальной оси z, так моменты сил тяжести и реакции опоры равны нулю (векторы силы тяжести и реакции опоры параллельны оси вращения).
|
|
|
|
|
|
1й курс. 2й семестр. Лекция 3 |
|
10 |
||||
|
|
|
|
Векторная форма записи угловой скорости |
||||||||
|
Рассмотрим поворот твердого тела на малый угол dϕ вокруг оси z. |
|||||||||||
Некоторая точка А, находящаяся на расстоянии r от оси вращения переместится |
||||||||||||
|
|
|
z |
|
|
на малый вектор ds , направленный по касательной к |
||||||
|
|
|
|
|
окружности в направлении поворота: ds = r dϕ . Пусть |
|||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
положение точки А задано с помощью радиус-вектора |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
R из какой-то точки О на оси вращения, тогда |
||||||
|
|
|
|
|
r = R sin α , поэтому можно написать |
|||||||
|
|
|
r |
ds |
||||||||
|
|
|
|
|
|
|
ds = R sin a × dj . |
|||||
|
|
|
A |
|
|
|
|
|
||||
|
|
|
|
|
Если вдоль оси вращения задать вектор поворота dj , |
|||||||
|
|
|
|
|
|
|||||||
|
|
ω |
α |
|
|
связанный с направлением поворота правилом бурав- |
||||||
|
|
R |
|
|
чика, то справедливым будет равенство |
|||||||
|
|
|
|
|
||||||||
|
|
dϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ds |
= dϕ× R . |
||
|
|
|
|
|
|
Так как для скорости движения точки А справедливо |
||||||
|
|
|
|
|
|
выражение ds = v × dt , то задавая вектор угловой скоро- |
||||||
|
|
|
|
|
|
сти, направленный вдоль оси вращения равенством |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dϕ |
|
|
|
|
|
|
|
|
|
|
|
ω = |
dt |
, получаем v |
= ω× R |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и направление вектора угловой скорости ω и направление вращения связаны пра- |
||||||||||||
вилом буравчика (правого винта). |
|
|
|
|
|
|||||||
|
С помощью вектора угловой скорости можно задать вектор момента им- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
пульса вдоль оси вращения Lz |
= Iz ω . |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
Замечание. |
|
|
|
||
Условия равновесия тела можно сформулировать таким образом: |
||||||||||||
1) Если тело покоится, то центр масс тела не движется, поэтому для центра масс |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a = |
∑ Fi |
ВНЕШ |
|
|
|
|
|
|
|
|
|
|
i |
= |
0 . |
|
|
|
|
|
|
|
|
|
|
C |
mC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
Поэтому ∑ Fi ВНЕШ |
= 0 - сумма внешних сил, действующих на тело равна нулю. |
|||||||||||
|
|
|
i |
|
|
|
|
|
|
|
|
|
Следовательно, сумма проекций внешних сил на любое направление равна нулю. |
||||||||||||
2) Если тело не вращается, то угловое ускорение ε = |
M zВНЕШ |
= 0 , т.е. |
ВНЕШ |
= 0 - |
|
|
M z |
||||
Iz |
|||||
|
|
|
|
сумма моментов внешних сил относительно любой оси равна нулю.