

Downloads_1 / 2y_semestr_Lektsia_07
.pdf1й курс. 2й семестр. Лекция 7 |
1 |
Лекция 7. «Механические волны».
Виды механических волн. Упругие волны в стержнях. Волновое уравнение. Плоская гармоническая волна, длина волны, фазовая скорость. Сферические волны. Объемная плотность энергии волны. Вектор Умова – вектор плотности потока энергии. Когерентные волны. Интерференция волн. Стоячая волна.
Волна – это процесс распространения возмущений некоторой физической величины в пространстве с течением времени. Если возмущения описываются как механическое движение среды, то волна называется механической. Например, возмущения могут представлять собой отклонения точек среды от своих положений равновесия.
Если эти отклонения направлены перпендикулярно движению волны, то волна называется поперечной, если параллельны - то продольной. Примером поперечных волн являются волны на поверхности жидкости или колебания гитарной струны. В глубине жидкости или в газе могут распространяться только продольные волны. Примером является звуковая волна – малые колебания давления (плотности) в газе или жидкости.
Важное свойство волновых движений состоит в локальной связи между возмущениями в близких точках среды. То есть отклонение от положения одной точки вызывает отклонения соседних близких точек. Локальная связь между точками является причинно-следственной связью, поэтому процесс распространения возмущения в таких средах имеет конечную скорость.
Монохроматическая волна –– это бесконечная волна, при которой состояние среды описывается с помощью гармонической функции постоянной частоты,
является идеализацией волнового процесса
|
L=x |
|
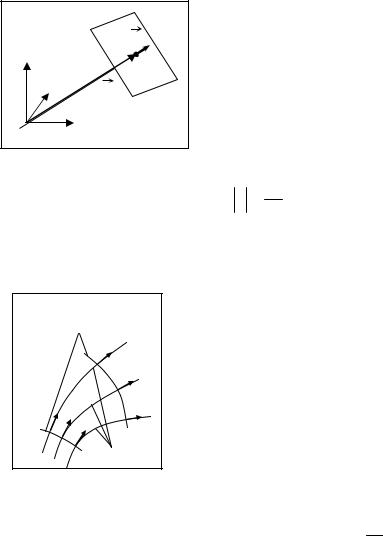
Рассмотрим поперечную монохромати- |
||
|
|
ческую волну, испускаемую некоторым ис- |
|||
|
|
|
|
||
x=0 |
|
|
|
точником, находящимся в начале оси X (х=0) |
|
x |
X |
||||
и совершающим колебания по гармоническо- |
|||||
|
|
|
|||
му закону. |
Пусть его закон колебаний имеет вид ξ = A cos (ω ×t +α ) . Так как ско- |
||||
рость движения волны конечная, то обозначим её через v. Колебание, испущенное источником в момент времени t придет (без изменений) в точку, отстоящую от
источника на расстоянии L, лишь спустя промежуток времени t = L :
v
ξ= A cos (ω (t − t ) + α ) = A cos ωt − ω L + α .
v
Поэтому колебания в координате x>0 будут иметь вид ξ = A cos (ωt − kx + α ) - волна, бегущая в положительном направлении оси X, а если x < 0, то ξ = A cos (ωt + kx + α )
- волна, бегущая в отрицательном направлении оси X. Здесь величина k = ω назы-
v
вается волновым числом.
Так как ω - циклическая частота по времени, то временной период T = 2ωp .
1й курс. 2й семестр. Лекция 7 |
2 |
k – циклическая частота колебаний по координате X, поэтому пространственный
период l = |
2π |
называется длиной волны. Из соотношения k = ω получаем |
2π |
= |
2π |
, |
k |
l |
|
||||
|
v |
|
vT |
|||
откуда получаем λ = vT - то есть длина волны – это расстояние, проходимое волной за время, равное периоду колебаний.
Для функции ξ = A cos (ωt - kx +α ) |
выполняются соотношения |
|
||||||||
¶2ξ |
= -ω 2 A cos (ωt - kx +α ) , |
¶2ξ |
= -k 2 A cos (ωt - kx +α ) , |
1 ¶2ξ |
= |
1 |
¶2ξ |
откуда |
||
|
|
|
|
|
||||||
¶t 2 |
¶x2 |
ω2 ¶t 2 |
|
|||||||
|
¶2ξ |
= v2 ¶2ξ . |
|
k 2 ¶x2 |
|
|||||
|
|
|
|
|
|
|
|
|
||
|
|
|
¶t 2 |
¶x2 |
|
|
|
|
|
|
Это уравнение называется волновым уравнением для одномерного случая - вдоль координаты X.
Рассмотрим свойства решений этого уравнения.
1. Геометрическое место точек среды, где наблюдаются колебания, называют вол-
новым полем.
Волновое уравнение – линейное, в том смысле, что сумма двух решений тоже является решением. Это так называемый принцип суперпозиции – при наложении
волновых полей получается волновое поле, являющееся их суммой.
В общем случае решением одномерного волнового уравнения является сумма двух произвольных дважды непрерывно-дифференцируемых функций
|
|
|
|
|
|
|
|
|
ξ = f1 ( x - vt ) + f2 ( x + vt ) , |
|
|||
одна из которых - |
f1 ( x - vt ) - описывает волновое поле, распространяющееся в по- |
||||||||||||
ложительном направлении оси X – |
его называют убегающей волной, а вторая, |
||||||||||||
f2 ( x + vt ) |
- в отрицательном направлениях оси X – её называют набегающей вол- |
||||||||||||
ной. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Действительно, подставим в волновое уравнение выражение |
||||||||||||
|
|
∂ξ = |
∂ |
|
|
|
|
ξ = f1 ( x - vt ) + f2 ( x + vt ) . |
|
||||
Тогда |
( f ( x - vt ) + f |
|
( x + vt )) = -v × f ¢( x - vt ) + v × f ¢( x + vt ) , |
|
|||||||||
¶t |
|
|
|||||||||||
|
|
¶t |
|
1 |
|
|
2 |
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
¶2ξ = v2 f |
¢¢( x - vt ) + v2 |
f ¢¢( x + vt ) , |
|
|
|
|
|||||||
¶t 2 |
|
1 |
|
|
|
2 |
|
|
|
¶2ξ |
|
|
|
∂ξ = |
∂ |
( f ( x - vt ) + f |
|
( x + vt )) = f ¢( x - vt ) + f ¢( x + vt ) , |
= f ¢¢( x - vt ) + f ¢¢( x + vt ) . |
||||||||
¶x |
|
¶x2 |
|||||||||||
¶x |
|
1 |
|
|
2 |
|
|
1 |
2 |
1 |
2 |
||
Штрихи означают производные от функций по аргументу. |
|
||||||||||||
При подстановке этих соотношений в волновое уравнение ¶2ξ |
= v2 ¶2ξ : |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
¶t 2 |
¶x2 |
v2 f1¢¢( x - vt ) + v2 f2¢¢( x + vt ) = v2 ( f1¢¢( x - vt ) + f2¢¢( x + vt ))
получаем тождество.
2. Геометрическое место точек в пространстве, для которых фаза волны одинаковая называют волновой или фазовой поверхностью. В одномерном случае волновая поверхность – это плоскость, которая движется вдоль оси с течением времени ωt + kx = const или ωt − kx = const . Поэтому волна называется плоской. Если волновая поверхность – сфера, то волна называется сферической.
|
|
|
1й курс. 2й семестр. Лекция 7 |
|
3 |
||||||
|
|
Скорость движения плоской фазовой поверхности можно найти дифферен- |
|||||||||
цированием по времени уравнений |
ωt + kx = const |
|
|
ɺ |
|||||||
или ωt − kx = const : ω + kx = 0 или |
|||||||||||
|
ɺ |
= 0 . Видно, что скорость вдоль оси v = ± |
ω |
по величине совпадает со скоро- |
|||||||
ω − kx |
k |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
стью волны, определяемой из волнового уравнения. Таким образом, в волновом |
|||||||||||
|
|
∂2ξ |
∂2ξ |
|
|
|
|
|
|
|
|
уравнении ∂t 2 = v2 |
∂x2 присутствует квадрат скорости, которая называется фазо- |
||||||||||
вой скоростью волны. |
|
|
|
|
|
|
|
|
|||
|
|
Замечание. В общем случае, фазовая скорость может зависеть от парамет- |
|||||||||
ров волны (амплитуды, частоты). Для случая, когда скорость зависит от частоты |
|||||||||||
волны, имеется особое название – дисперсия волн. |
|
|
|||||||||
Уравнение плоской волны, распространяющейся в произвольном направле- |
|||||||||||
|
|
|
|
|
нии. |
|
|
|
|
|
|
|
|
Пусть плоская волна движется в направлении прямой линии, которая про- |
|||||||||
|
|
|
ходит через начало координат. Тогда радиус-вектор лю- |
||||||||
|
|
k |
бой точки, лежащей на этой прямой, тоже лежит на этой |
||||||||
|
|
прямой и длина этого вектора равна расстоянию R точки |
|||||||||
|
|
|
|||||||||
Z |
Y |
R |
от начала координат. Поэтому уравнение волны, которая |
||||||||
|
бежит вдоль этой прямой можно записать в виде |
||||||||||
|
|
||||||||||
|
|
X |
ξ = A cos (ωt − kR + α ) . Фазовая поверхность волны перпен- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
дикулярна этой прямой. Введем волновой вектор k , на- |
||||||||
правленный перпендикулярно фазовой (волновой) поверхности волны в сторону |
|||||||||||
|
|
|
|
равна волновому числу. Так как волновой |
|||||||
её движения. Длина вектора k = 2π |
|||||||||||
|
|
|
λ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
вектор параллелен прямой, то можно записать kR = (k ,R) и ξ = Asin (ωt − (k , R) + α ) . |
|||||||||||
|
|
Но для любой плоской волны всегда есть прямая линия, перпендикулярная |
|||||||||
|
Волновая по- |
волновой поверхности и проходящая через начало коорди- |
|||||||||
|
нат, поэтому такая форма записи закона движения плоской |
||||||||||
|
верхность |
волны является общей. |
|
|
|
|
|||||
|
|
|
|
|
|
|
|||||
|
|
|
В чем удобство введения волнового вектора? С его по- |
||||||||
|
|
|
мощью можно определять положения любой волновой по- |
||||||||
|
|
|
верхности. При этом движение волновой поверхности можно |
||||||||
|
|
|
описать с помощью лучей. Луч – |
это линия в пространстве, |
|||||||
|
|
лучи |
касательная к которой в каждой точке направлена как волно- |
||||||||
|
|
вой вектор. |
|
|
|
|
|
|
|
|
|
|
|
|
Волновое уравнение для движения волны в 3х мерном |
||||||||
пространстве в общем случае имеет вид: |
|
|
|
|
|
||||||
|
|
|
∂2ξ + |
∂2ξ |
+ |
∂2ξ |
= 1 ∂2ξ . |
|
|
||
|
|
|
∂x2 |
∂y2 |
|
∂z2 |
|
v2 ∂t 2 |
|
|
|
Если ввести условное обозначение |
∂2ξ |
+ |
∂2ξ |
+ |
∂2ξ = Δξ , то это уравнение можно за- |
||||||
|
|
|
|
∂x2 |
|
∂y2 |
|
∂z2 |
|
|
|
писать в виде |
|
|
|
|
|
|
|
|
|
||

|
|
|
|
|
|
|
|
|
|
|
|
1й курс. 2й семестр. Лекция 7 |
|
|
|
|
|
|
4 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Dx = 1 ¶2x |
, |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v2 ¶t 2 |
|
|
|
|
|
|
|
|
|
|
|
где ¶2 |
+ |
¶2 + |
¶2 = D так называемый оператор Лапласа (Пьер-Симо1нЛапла1с– |
||||||||||||||||||||||||
¶x2 |
|
¶y2 |
¶z2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
французский ученый). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Сферическая волна описывается функцией |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x = A0 ×cos (wt + (k ,R) + a)+ A0 |
×cos (wt - (k ,R )+ b). |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
Амплитуда сферической волны обратно пропорциональна расстоянию от центра |
|||||||||||||||||||||||||||
волны. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Примеры по выводу волновых уравнений. |
|
|
|
|||||||||||||||||||
Рассмотрим малые поперечные колебания тонкой однородной струны дли- |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
|
|
F |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a2 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
x+Dx |
X |
|
|
ны L и массы m, закрепленной с обоих концов. Пусть сила натяжения струны F |
|||||||||||||||||||||||||||
постоянная по величине. Форма струны задается уравнением y(x). Выделим ма- |
|||||||||||||||||||||||||||
лый кусок струны, длина которого вдоль оси X равна |
|
|
x, а масса m. Так как ко- |
||||||||||||||||||||||||
лебания поперечные, то запишем второй закон Ньютона для куска |
m вдоль оси |
||||||||||||||||||||||||||
Y: Dmay = F × sin a2 - F × sin a1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
При малых углах (в радианах) справедливо α ≈ sin α ≈ tgα . Но |
|
|
|||||||||||||||||||||||||
|
tga = ¶y |
, |
tga |
2 |
= ¶y |
|
» ¶y |
|
+ ¶2 y × Dx |
(разложение в ряд Тейлора). |
|||||||||||||||||
|
|
1 |
¶x x |
|
|
|
|
¶x x+Δx |
¶x x |
¶x2 |
x |
|
|
|
|
|
|
|
|
|
|
|
|||||
Поэтому Dma |
|
|
|
|
¶y |
+ |
¶2 y |
|
|
|
¶y |
= |
F × |
¶2 y |
× Dx . |
|
|
|
|||||||||
|
= F × |
|
|
|
× Dx - F × |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
y |
|
|
|
¶x x |
¶x |
2 |
|
|
|
¶x x |
|
¶x |
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
x |
|
|
|
|
||||||
Т.к. Dm = m Dx и a |
y |
= |
¶2 y |
, то m Dx ¶2 y = F × |
¶2 y |
× Dx . Окончательно получаем уравне- |
|||||||||||||||||||||
|
|
L |
|
|
|
¶t2 |
|
|
L |
|
¶t 2 |
|
|
¶x2 |
x |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ние |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¶2 y = LF × ¶2 y |
. Поэтому скорость волны в струне v = |
|
LF .♣ |
|
|
|
|||||||||||||||||||||
¶t2 |
m |
¶x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если возвращающая сила пропорциональна |
||||||||||||
|
|
|
|
|
|
|
|
|
|
смещению точки от положения равновесия, то вол- |
|||||||||||||||||
|
F1 |
|
F2 |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
на называется упругой. |
Выведем волновое уравне- |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ние на примере продольных волн деформации в |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
X |
|
стержне. |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
x |
x+Dx |
|
|
|
|
|
|
|
|
|
Выделим |
часть |
|
|
стержня |
длиной |
x. Если |
||||||||
|
|
|
|
|
|
|
|
|
площадь |
поперечного |
|
|
сечения |
стержня |
равна S, |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
1й курс. 2й семестр. Лекция 7 |
5 |
плотность материала ρ, то масса этой части m = ρ S x . При деформациях на эту часть стержня действую силы упругости. Запишем второй закон Ньютона – уравнение движения этой части стержня вдоль оси Х:
max = F2 − F1 .
Это уравнение записано в предположении растяжения этой части стержня. Силы с обеих сторон выделенной части вызывают деформацию этой части стержня. При равновесии и отсутствии деформации положение точек в двух близко расположенных сечениях стержня можно задать координатами x и x+ x. При деформировании стержня его точки сместятся от равновесных положений. Пусть x1(x) – задает положение точки стержня при деформации, если её равновесное положение задавалось координатой x. Тогда для близкого сечения новыми координатами будет x1+ x1. Изменение линейного размера части стержня вызвано смещением точек стержня. Введем величину смещения ξ= x1 − x. По определению, относительная деформация в данном сечении стержня – это отношение изменения
длины части стержня к начальной длине этой части: ε = |
x1 − |
x |
. Если стержень |
Dx |
|
||
|
и поэтому ε < 0. Та- |
||
сжимается, то его продольные размеры уменьшаются Dx1 < Dx |
|||
ким образом, при сжатии ε < 0 и при растяжении ε > 0.
Если все точки стержня смещаются на одинаковую величину, то изменения длины участка стержня не происходит. Поэтому деформация равна разности сме-
щений соседних точек Dx1 - Dx = Dξ . Тогда можно записать ε = |
|
x1 − x |
= |
ξ |
. В пре- |
|||||||||||||||||||
|
Dx |
Dx |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
деле (при |
x → 0 ) получаем ε = |
∂ξ . С учётом напряжений в сечениях стержня |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
|
|
|
|
|
F1 = σ x S , |
F2 |
= σ x+Δx S . Напряжения в сечениях стержня найдем по закону Гука: |
||||||||||||||||||||||
σ x |
= Eε x , σ x+Δx |
= Eε x+Δx , где Е – |
модуль упругости материала (модуль Юнга). |
|||||||||||||||||||||
|
|
|
|
Относительная деформация меняется вдоль стержня, поэтому можно счи- |
||||||||||||||||||||
тать, что ε x+Δx |
= ε x + ∂ε |
x + ... (разложение в ряд Тейлора). |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
|
|
|
∂2ξ . Последовательно под- |
|||||
|
|
|
|
Ускорение точек выделенной части стержня a |
|
= |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
∂t 2 |
|
= F2 − F1 , т.е. |
|||
ставим |
эти |
соотношения |
в |
уравнения |
движения: |
max |
||||||||||||||||||
ρ S x |
∂2ξ |
= σ x+Δx S − σ x S , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
∂t 2 |
¶2ξ |
|
|
¶ε |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
ρ |
|
∂2ξ |
|
2 − Eε1 , ρDx |
|
+ |
|
∂2ξ |
= E |
∂ε |
|
|
|
|
||||||||||
x |
∂t |
2 = Eε |
¶t |
2 = E |
ε1 |
¶x |
Dx - Eε1 , ρ x |
∂t |
2 |
x . |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂x |
|
|
|
|
||||||
С |
|
учетом |
равенства |
ε = ∂ξ , |
после сокращений, |
получаем |
дифференциальное |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
уравнение, описывающее распространение волны (вдоль одного направления – оси Х):
¶2ξ |
= |
E |
× |
¶2ξ |
или |
∂2ξ |
= v2 ∂2ξ . |
¶t 2 |
|
¶x2 |
∂t 2 |
||||
|
ρ |
|
∂x2 |
||||

1й курс. 2й семестр. Лекция 7 |
6 |
Здесь, ξ - параметр, описывающий колебания (величина смещения точек при де-
формации), v = |
E |
– |
скорость волны.♣ |
|
|
|
|
|
|
|
|
|
|
|
|||
|
ρ |
|
|
|
|
|
|
|
Рассмотрим выделенный участок стержня длиной x. При колебаниях ско- |
||||||||
рость этого участка |
∂ξ и величина деформации |
∂ξ . Соответственно, кинетиче- |
||||||
|
|
|
¶t |
¶x |
|
|
|
|
|
|
|
|
|
|
1 |
|
¶x 2 |
ская и потенциальные энергии выделенного участка равны WК |
= |
|
rSDx |
и |
||||
|
||||||||
|
|
|
|
|
|
2 |
|
¶t |
|
|
1 |
|
¶x 2 |
|
WП |
= |
|
E |
|
SDx . Объем участка V = S x . Объемная плотность механической |
|
|||||
|
|
2 |
|
¶x |
|
|
W +W |
П |
|
1 |
|
¶x 2 |
1 |
|
¶x 2 |
|
энергии w = |
К |
= |
|
r |
|
+ |
|
E |
. |
|
|
|
|
|
|||||||
|
V |
|
|
2 |
|
¶t |
|
2 |
|
¶x |
Если уравнение движения волны записать в виде x = A cos (wt - kx + a) , то с учетом
соотношений |
|
|
для |
скорости |
|
¶x = -wA sin (wt - kx + a) |
и |
деформации |
|||||||||||||||||||||
¶x = kA sin (wt - kx + a) получается |
|
|
|
¶t |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
¶x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
w = |
1 |
r×w2 A2 sin2 (wt - kx + a) + |
1 |
E × k 2 A2 sin2 (wt - kx + a) или |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
w = (r×w2 + E × k 2 ) |
1 |
|
A2 sin2 (wt - kx + a) . |
|
|
||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
ω 2 |
|
|
|
Используем выражение для скорости волны |
v2 = |
|
= k 2 : |
|
|
|
|||||||||||||||||||||||
ρ |
|
|
|
||||||||||||||||||||||||||
|
|
|
E |
|
k 2 |
|
1 |
|
(wt |
- kx + a) |
|
|
|
1 |
|
|
(wt - kx |
+ a) |
|
|
|||||||||
w = r×w2 1+ |
|
× |
|
|
|
A2 sin2 |
= r×w2 |
2 |
|
A2 sin2 |
|
|
|||||||||||||||||
r |
2 |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
w |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
w = r×w2 A2 |
(1- cos (2[wt - kx + a])) . |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Среднее значение плотности потока энергии, переносимой волной |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
w = lim 1 |
∫ r×w A |
|
|
(1- cos ( |
2[wt - kx + a]))dt |
= r×w A |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
t |
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
||
|
|
|
|
|
|
|
|
t →∞ t |
0 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
||||
Следствия
1) Величины скорости точек ∂ξ = -wA sin (wt - kx + a) и деформации среды
¶t
∂ξ = kA sin (wt - kx + a) колеблются синфазно друг другу.
¶x
2)Закон изменения плотности потока энергии описывается волновым уравнением и представляет волну плотности энергии. Скорость этой волны
vЭН = 2ω = v в данном случае совпадает с фазовой скоростью волны. (В об-
2k
щем случае это не так.)
1й курс. 2й семестр. Лекция 7 |
7 |
|
Вектор Умова |
|
|
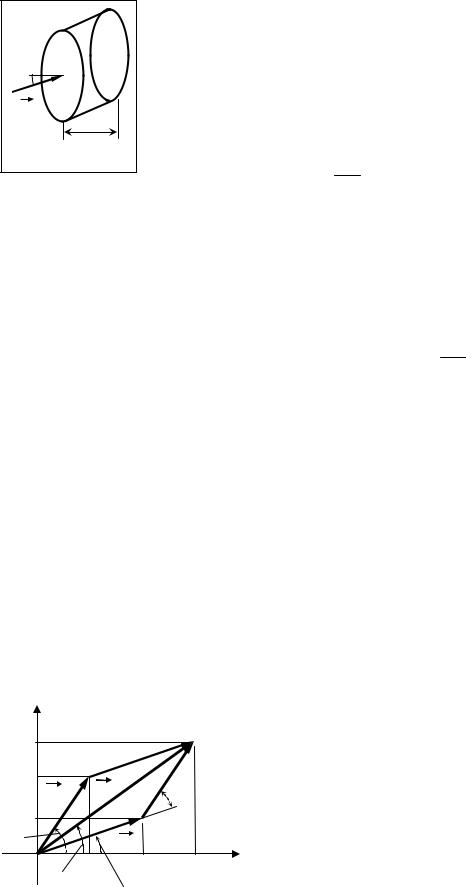
Пусть энергия переносится со скоростью v в направле- |
|
|
нии под углом α к нормали некоторой малой площадки S. То- |
|
S |
гда вся энергия, прошедшая через эту площадку за малое вре- |
|
мя dt окажется в области, объем которой dV = S × v ×cos a × dt (на |
||
a |
рисунке эта область является косым цилиндром). Если объем- |
|
v |
ная плотность энергии равна w, то энергия этого объема |
|
W = w ×dV=w × S × v ×cos a × dt |
||
|
||
v×cosa×dt |
Мощность переноса энергии через площадку S: |
|
|
dW = w × S × v ×cos a . |
|
|
dt |
Введем вектор плотности потока энергии (Вектор Умова)
|
|
|
= w × v , |
|
|
|
|
|
|
j |
|
|
|
||
тогда |
dW |
= j × S ×cos a . Если ввести вектор |
|
|
× S , |
направленный по нормали к |
|
|
S |
= n |
|||||
|
|||||||
dt
площадке, и скалярное произведение j × S ×cos a = ( j ,S ) определить как поток векто-
ра Умова через площадку S, то мощность переноса энергии через площадку опре-
dW = ( )
деляется потоком вектора Умова через эту площадку j ,S .
dt
Интенсивность волны – это средняя по времени энергия переносимая волной через площадку в направлении перпендикулярном к этой площадке.
Для плоской волны интенсивность I = r×w2 A2 S не меняется при распространении
2
волны.
Для сферической волны интенсивность через любую сферу радиуса R с центром в источнике
I = |
r×w2 A2 |
S = r×w2 |
A02 |
4pR2 |
= 2pr×w2 A 2 |
|
|
||||
2 |
2 R2 |
|
0 |
||
является постоянной величиной.
Если интенсивность волны при её распространении в некоторой среде уменьшается, то среда называется диссипативной. Если интенсивность волны увеличивается, то среда называется активной.
|
|
|
Интерференция волн |
|
|||
|
|
|
|
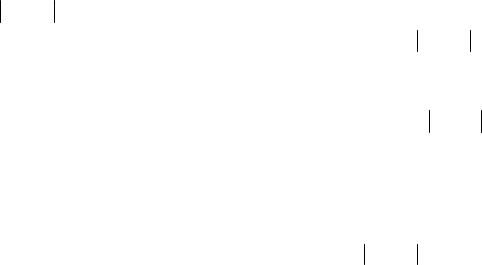
Интерференция волн – взаимное усиление |
|||
Y |
|
|
|
или ослабление волн при их наложении друг на |
|||
y∑ |
|
|
|
друга (суперпозиции волн при одновременном |
|||
|
|
|
распространении в пространстве), что приводит |
||||
y2 |
|
|
|
||||
А∑ |
|
d |
к перераспределению энергии колебаний, устой- |
||||
А2 |
|
чивому во |
времени. |
Интерференция волн на- |
|||
y1 |
|
|
|
блюдается |
согласно |
принципу суперпозиции |
|
j2 |
|
|
|
||||
|
А1 |
X |
волн. |
|
|
||
O |
x2 |
x1 |
x∑ |
Рассмотрим суперпозицию двух волн од- |
|||
j∑ |
ного направления x1 = A1 cos (w1t - k1 x1 + a1 ) и |
||||||
|
j1 |
|
|||||
|
|
|
x2 = A2 cos (w2t - k2 x2 + a2 ) . |
||||
|
|
|
|
||||
1й курс. 2й семестр. Лекция 7 |
8 |
Воспользуемся амплитудно-векторной диаграммой. По теореме косинусов
AΣ2 = A12 + A22 - 2 A1 A2 cos (p - d)
Учтем, что cos (p - d) = -cos d ,
d = j2 - j1 = (w2 - w1 ) t - (k2 x2 - k1 x1 ) + a2 - a1 , тогда
AΣ2 = A12 + A22 + 2 A1 A2 cos ((w2 - w1 ) t - (k2 x2 - k1 x1 ) + a2 - a1 ) .
Если результирующая амплитуда не зависит от времени, то разность фаз волн должна быть постоянной во времени. Такие волны называются когерентными. В частности, получаем, что частоты когерентных волн совпадают w2 = w1 .
Вообще говоря, волны могут двигаться к точке встречи в разных средах, поэтому их скорости могут быть там различными, а также расстояния до точки тоже могут быть разными, поэтому следует написать
AΣ2 = A12 + A22 + 2 A1 A2 cos ((k2 x2 - k1 x1 ) - (a2 - a1 ))
Поэтому в точке наблюдения может быть либо усиление колебаний при
либо ослабление колебаний при cos ((k2 x2 - k1 x1 ) - (a2 - a1 )) = -1.
Стоячая волна.
Стоячая волна образуется при наложении двух волн одинаковой частоты, бегущих в противоположных направлениях:
ξ = A cos (ωt + kx +α1 ) + A cos (ωt - kx +α2 ) .
Пусть, например, a1 = 0 и a2 = 0 , тогда ξ = 2 A cos (kx) cos (ωt +θ ) .
Величину A0 = 2 A cos (kx) можно назвать амплитудой стоячей волны. Так как амплитуда не может быть отрицательной, то необходимо брать модуль cos (kx) . Тогда в тех точках, где значение θ=0, а в тех точках, где надо,
для учета знака минус, принять θ=π. Точки, где амплитуда стоячей волны максимальная, называются пучностями. Эти точки можно найти из условия cos (kx ) = 1 ,
откуда kx = ±π × n (n – целое число). Следовательно, координаты пучностей
xПУЧ n |
= ± π × n = ± π × n λ = ±n λ . Соседние пучности находятся друг от друга на рас- |
||
|
k |
2π |
2 |
стоянии λ |
- половины длины волны. Точки, где амплитуда стоячей волны равна |
||
|
2 |
|
|
нулю, называются узлами. Эти точки можно найти из условия cos (kx) = 0 , откуда
kx = π ± π × n (n – |
целое число). Следовательно, координаты узлов |
|||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
π |
|
|
|
|
|
|
|
|
± π × n |
|
|
± π × n |
1 |
λ |
|
|
УЗ |
|
2 |
|
|
2 |
|
|
|||
xn |
= |
|
|
= |
|
|
λ = |
|
± n |
. |
|
k |
|
2π |
|
||||||
|
|
|
|
|
2 |
2 |
|
|||
Соседние узлы находятся друг от друга на расстоянии λ - половины длины вол-
2
ны.
1й курс. 2й семестр. Лекция 7 |
9 |
Следовательно, расстояние между ближайшими соседними узлами и пучностями
равно λ .
4
Найдем объемную плотность энергии стоячей волны
|
|
|
|
|
|
|
1 |
|
∂ξ 2 |
|
|
1 |
|
∂ξ 2 |
|
|||||
|
|
|
w = wК + wП |
= |
|
ρ |
|
|
+ |
|
E |
|
|
|||||||
|
|
|
2 |
2 |
|
|||||||||||||||
|
|
|
|
|
|
|
|
∂t |
|
|
|
∂x |
|
|||||||
w = |
1 |
ρ (−ω2 A cos (kx) sin (ωt + θ))2 + |
1 |
E (−k 2 A sin (kx)cos (ωt + θ))2 , |
|
|||||||||||||||
|
|
|
||||||||||||||||||
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||
|
w = 2 A2ρω2 (cos2 (kx) sin2 (ωt + θ) + sin2 (kx)cos2 (ωt + θ)) , |
|
||||||||||||||||||
|
|
|
1+ cos (2kx) 1− cos (2[ωt + θ]) |
|
1− cos (2kx) 1+ cos (2[ωt + θ]) |
|||||||||||||||
w = 2 A2ρω2 |
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
, |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
2 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
w = A2ρω2 (1− cos (2kx)cos (2[ωt + θ])).
Видно, что плотность энергии тоже является стоячей волной. Т.е. энергия стоячей волной не переносится.