

Downloads_1 / 2y_semestr_Lektsia_04
.pdf
|
|
|
|
|
1й курс. 2й семестр. Лекция 4 |
|
|
|
|
|
1 |
||||||||
|
Лекция 4. Закон сохранения энергии в механике. |
|
|
||||||||||||||||
Работа и кинетическая энергия. Консервативные силы. Работа в потенциальном |
|||||||||||||||||||
поле. Потенциальная энергия тяготения и упругих деформаций. Связь между по- |
|||||||||||||||||||
тенциальной энергией и силой. Закон сохранения энергии. |
|
|
|
||||||||||||||||
Рассмотрим движение материальной точки в некоторой инерциальной сис- |
|||||||||||||||||||
теме отсчета. Второй закон Ньютона имеет вид |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m dv = F . |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
Вектор скорости точки v направлен по касательной к траектории. Поэтому век- |
|||||||||||||||||||
тор малого перемещения точки dr = v × dt |
тоже направлен по касательной к траек- |
||||||||||||||||||
тории (dt – малый промежуток времени). Умножаем скалярно уравнение движе- |
|||||||||||||||||||
ния на вектор малого перемещения и интегрируем вдоль пути |
|
|
|||||||||||||||||
|
|
|
|
|
∫ |
|
dv |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
m |
,dr |
= |
∫ (F ,dr ) . |
|
|
|
|
|
||||||
|
|
|
|
|
Путь |
dt |
|
|
|
Путь |
|
|
|
|
|
|
|
|
|
Преобразования левой части равенства. |
|
|
|
|
|
|
|
|
|
||||||||||
|
dv |
|
|
dv |
|
|
dv |
|
|
|
1 |
d |
|
|
mv2 |
|
|
||
m |
,dr = |
m |
dt |
,vdt = m |
dt |
,v dt = m |
|
|
(v,v) dt = d |
|
|
||||||||
|
dt |
|
|
|
|
|
|
|
|
2 |
dt |
|
|
2 |
|
|
|||
|
|
|
dv |
|
∫ |
mv2 |
mv2 |
|
|
|
|
mv2 |
|
|
|
||||
|
|
∫ m |
|
,dr = |
d |
|
|
= |
|
|
|
|
− |
. |
|
|
|||
|
|
Путь |
dt |
|
|
Путь |
|
2 |
|
|
2 |
КОНЕЧ |
2 |
НАЧ |
|
|
|||
Кинетической энергией материальной точки массы m, которая движется |
|||||||||||||||||||
скоростью v, называется величина W |
|
= m × v2 . |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
КИН |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Единицы измерения кинетической энергии – |
Дж (Джоуль). Иногда кинети- |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m × v2 |
p2 |
ческую энергию полезно выразить через импульс тела ( p = mv ): W |
= |
= . |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КИН |
2 |
2m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Замечание. Кинетическая энергия зависит от системы отсчета. Например, в сопут- |
|||||||||||||||||||
ствующей системе отсчета кинетическая энергия равна нулю. |
|
|
|||||||||||||||||
Преобразование правой части равенства. |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Работой постоянной силы F , действующей на материаль- |
|||||||||||||||||
|
F |
ную точку, при малом перемещении dr |
этой точки называет- |
||||||||||||||||
α |
|
ся произведение |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
A = (F, dr ) |
F |
× dr ×cosα, |
|
|
|||||
dr |
|
где α - угол между вектором силы и вектором перемещения. |
|||||||||||||||||
|
|
Единицы измерения работы – |
Дж (Джоуль). |
|
|
||||||||||||||
Работу величиной в один Джоуль совершает постоянная сила в 1 Ньютон, сов- |
|||||||||||||||||||
падающая по направлению с перемещением длиной 1 метр. |
|
|
|
||||||||||||||||
Работа переменной силы |
|
|
|
|
(Fx dx + Fy dy + Fz dz ) , |
|
|
|
|||||||||||
|
|
|
|
|
|
|
∫ |
|
|
|
|
||||||||
|
|
|
A = ∫ (F ,dr ) = |
|
|
|
|
||||||||||||
где dr = (dx,dy,dz ) |
|
|
Путь |
|
|
Путь |
|
|
|
|
|
|
|
|
|
||||
- малый вектор перемещения. |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
Итог |
|
|
|
|
|
|
|
|
|||

1й курс. 2й семестр. Лекция 4 |
2 |
Приравняем правую и левую части равенства
|
dv |
|
|
|
|
|
|
∫ m |
|
,dr |
= |
∫ (F ,dr ) |
|||
dt |
|||||||
Путь |
|
|
Путь |
|
|
||
Или, с учётом приведённых преобразований: W КОНЕЧ |
−W НАЧ = A . |
||||||
|
|
|
|
КИН |
|
КИН |
|
Таким образом была доказана теорема об изменении кинетической энергии. Из-
менение кинетической энергии материальной точки на участке пути равно ра- боте действующих на нее сил на этом участке.
Мощность силы.
Средней мощностью силы F называется отношение работы этой силы к интервалу времени, за который была совершения эта работа
P = A .
СР ∆t
Единицы измерения мощности Вт (Ватт), мощность силы в 1 Вт соответствует работе в 1 Дж, совершаемой силой за 1 секунду.
Мгновенной мощностью силы называется мощность этой силы за малый промежуток времени
|
(F ,dr ) |
|
|
|
P = |
|
= (F ,v), |
||
dt |
||||
где v - вектор скорости точки. |
|
|
||
|
|
v , то работа данной силы равна |
||
|
|
|||
Следствие. Если в каждый момент времени F |
||||
нулю.
Кинетическая энергия твердого тела, вращающегося вокруг неподвижной оси.
В случае вращения твёрдого тела величина скорости вращения любой точки вокруг оси равна vi = ωri , где ri - расстояние от этой точки до оси вращения, поэтому суммарная кинетическая энергия всех точек
WКИНВРАЩ = ∑ |
mi vi2 |
= ∑ |
mi ω2ri |
2 |
= ω2 |
∑ mi ri |
2 = ω2 |
Iz , |
2 |
2 |
|
||||||
i |
i |
2 |
i |
2 |
|
|||
где I z - момент инерции тела относительно оси вращения.
Рассмотрим уравнение динамики вращательного движения твердого тела вокруг оси
|
|
|
|
|
I z |
dω |
= M z . |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
dt |
|
|
|
|
||
При малом угле поворота dϕ = ωdt отсюда следует |
|
||||||||||||
|
|
|
I |
|
dω |
dϕ = M |
dϕ |
|
|
|
|||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
z |
dt |
|
|
z |
|
|
|
|
|
Преобразования левой части равенства |
|
|
|
|
|||||||||
|
dω |
|
|
|
|
|
|
I |
ω2 |
|
|||
Iz |
|
|
ωdt = Iz ωdω = d |
z |
|
. |
|||||||
dt |
2 |
||||||||||||
|
|
|
|
|
|
|
|
|
|||||
Если рассмотреть поворот на конечный угол Δϕ :
|
|
1й курс. 2й семестр. Лекция 4 |
3 |
|||||||
|
|
|
∫ Iz |
dω |
dϕ = ∫ M z dϕ , |
|
||||
|
|
|
|
|
||||||
|
|
|
Δϕ |
dt |
|
|
Δϕ |
|
|
|
|
|
|
|
|
|
|
|
|
||
откуда |
|
|
|
|
|
|
|
|
|
|
|
I |
ω2 |
|
|
I |
ω2 |
|
= ∫ M z dϕ |
|
|
|
z |
|
|
− |
z |
|
|
|
||
|
2 |
2 |
|
|||||||
|
|
КОН |
|
НАЧ |
Δϕ |
|
||||
Так как слева стоит выражение для изменения кинетической энергии вращающегося тела, то справа стоит выражение для работы сил при повороте тела. Таким образом, если известен момент сил M z относительно оси вращения z, то работа
этих сил при повороте тела вокруг оси вычисляется по формуле
A = ∫ M z dϕ .
Δϕ
А мгновенная мощность сил
P = M z ω .
Замечание. Если малый угол поворота задать в векторном виде dj = w× dt , то выражение для мощности и работы при вращательном движении можно записать
следующим образом
A = ∫ (M ,dϕ), P = (M ,ω) .
Δϕ
КИНЕТИЧЕСКАЯ ЭНЕРГИЯ ТЕЛА (СИСТЕМЫ ТОЧЕК).
Рассмотрим систему движущихся точек. Кинетическая энергия системы - это суммарная энергия всех точек:
|
|
|
|
|
|
|
|
|
|
|
|
|
WΣ = ∑Wi = ∑ |
mi vi2 |
= |
∑ |
mi (vi ,vi ) |
. |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
i |
|
i |
|
|
|
||||
Скорость каждой точки можно представить в виде vi = vC + vi _ ОТН , |
||||||||||||||||||||||||||
где vC |
- скорость центра масс системы (одинаковая для всех точек системы), |
|||||||||||||||||||||||||
vi _ ОТН |
- относительная скорость точки (в системе отсчета, где центр масс покоит- |
|||||||||||||||||||||||||
ся). |
|
|
mi (vC |
+ vi _ ОТН ,vC + vi _ ОТН ) |
|
|
mi (vC ,vC ) + 2mi (vC ,vi _ ОТН ) + mi (vi _ ОТН ,vi _ ОТН ) |
|
||||||||||||||||||
|
WΣ = ∑ |
= ∑ |
. |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
i |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
i |
|
|
|
2 |
|
|
|||
В правой части равенства |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
∑ |
mi (vC ,vC ) |
= |
(vC ,vC ) |
|
∑ mi |
= |
mvC2 |
- кинетическая энергия центра масс системы; |
||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||
i |
|
2 |
|
|
|
|
|
2 |
|
i |
2 |
|
|
|
|
|
|
|
|
|
|
|
||||
∑ |
m (v |
,v |
|
) |
= ∑ |
m v2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
i |
i _ ОТН |
|
|
i _ ОТН |
|
i |
i _ ОТН |
= WКИНОТН |
- кинетическая энергия относительного дви- |
|||||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|||||||||||||||||
i |
|
|
|
|
|
|
|
i |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
жения точек ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
2mi |
(vC ,vi _ ОТН ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
∑ |
|
|
|
|
|
|
= |
vC |
,∑ mi vi _ ОТН |
, но ∑ mi vi _ ОТН |
= mvC _ ОТН , где |
vC _ ОТН - относительная |
||||||||||||||
|
2 |
|
|
|
|
|||||||||||||||||||||
i |
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
i |
|
|
|
|
|
|
|
||||
скорость центра масс в системе отсчета, где центр масс покоится. Очевидно vC _ ОТН = 0 , поэтому

|
1й курс. 2й семестр. Лекция 4 |
|
4 |
|||
|
2mi (vC ,vi _ ОТН ) |
|
|
|
|
|
∑ |
|
= vC |
,∑mi vi _ ОТН |
= 0 . |
||
2 |
||||||
i |
|
i |
|
|
||
Окончательно исходное равенство примет вид
2
WСИСТЕМЫ = mС vС +WКИНОТН .
2
Полная кинетическая энергия тела (системы точек) равна сумме кинетической
энергии движения центра масс и кинетической энергии движения относительно центра масс.(Это утверждение принято называть теоремой Кёнига)
Пример. Определить кинетическую энергию диска массой m и радиуса R, катя- щегося без проскальзывания со скоростью V.
Решение. Так как диск катится без проскальзывания, то скорость центра масс равна V и величина скорости вращения точек края диска относительно центра масс тоже равна V. Следовательно, полная кинетическая энергия:
mv2
WK = C + WK. ВРАЩ . 2
При вращении диска вокруг центра масс угловая скорость всех точек равна w = v ,
R
поэтому кинетическая энергия вращения WK. ВРАЩ = IzCw2 . Момент инерции диска
2
2
относительно оси вращения, проходящей через центр масс равен I zC = mR . Тогда
2
кинетическая энергия центра масс равна WKC = m × V2 . Следовательно
2
W = W + W |
= |
m × v2 |
+ |
1 |
|
mR2 |
|
v 2 |
= |
3 |
mv2 .♣ |
|
|
|
|
|
|
|
|||||||
K KC K. ВРАЩ |
2 |
|
|
|
|
|
|
4 |
|
|||
|
|
2 2 |
R |
|
||||||||
Математическое отступление
Пусть задана функция от нескольких аргументов, являющаяся непрерывнодифференцируемой по каждому из них f ( x, y, z ) . Производная такой функции по одному из аргументов (например, по x) при условии, что остальные не меняются,
называется частной производной по данному аргументу и обозначается |
∂f . |
||
Тогда для функции f в окрестности точки можно написать |
¶x |
||
|
|||
f (t , x, y, z ) = f (t , x , y, z ) + |
∂f |
( x - x ) + ... |
|
0 |
¶x |
0 |
|
|
|
||
Рассмотрим значения этой функции в двух соседних точках пространства, отстоящих друг от друга на малый вектор dr = (dx,dy,dz ) :
f1 = f ( x, y, z ) и f2 = f ( x + dx, y + dy, z + dz ) .
Тогда разложение в ряд Тейлора для функции f вблизи точки ( x, y, z ) имеет вид:
f |
|
= f |
+ |
∂f |
dx + |
∂f |
dy + |
∂f dz + ... |
|
2 |
1 |
|
¶x |
|
¶y |
|
¶z |

|
|
|
1й курс. 2й семестр. Лекция 4 |
5 |
||||
Если ввести вектор |
|
¶f |
, |
¶f |
, |
|
, который называется градиентом функции |
|
gradf = |
¶f |
|
||||||
|
|
¶x |
|
¶y |
|
¶z |
|
|
f, и отбросить остальные слагаемые в разложении (которые обозначены точками), то для изменения значений f можно записать
df = f |
2 |
- f » ( gradf ,dr ) = |
|
gradf |
|
× |
|
dr |
|
×cos a , |
|
|
|
|
|||||||
|
1 |
|
|
|
|
|
|
|
|
где α - угол между векторами gradf и dr .
Свойства градиента функции
1) В каком направлении нужно двигаться, чтобы увеличение функции было максимальным? Видно, что при постоянных величинах gradf и dr значение δf бу-
дет максимальным при cos α = 1 ( α = 0 ), т.е. вектор dr должен быть сонаправлен с вектором gradf . Следовательно, вектор градиента функции gradf направлен в сторону максимального роста функции f.
2) Поверхностью уровня функции f называется поверхность в пространстве, на которой значение функции является постоянным f ( x, y, z ) = const . Если сместиться вдоль поверхности уровня на малый вектор dr , то значение функции не изменится, поэтому δf = 0 . Это означает, что ( gradf ,dr ) = 0 , т.е. векторы gradf и dr перпен-
дикулярны. Следовательно, вектор градиента функции направлен перпендикулярно к поверхности уровня функции в каждой её точке.
ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ.
В механике силы принято делить на консервативные и неконсервативные.
Рассмотрим силы между телами, которые зависят только от их взаимного положения. Такие силы называются консервативными.
Консервативными силами являются:
1)Сила всемирного тяготения. Она зависит только от расстояния между телами.
2)Сила тяжести. Она является частным случаем силы всемирного тяготения.
3)Сила кулоновского взаимодействия.
4)Сила упругости.
Для каждой из консервативных сил можно определить потенциальную энергию. Потенциальная энергия для консервативной силы - это физическая величи-
на, зависящая только от положения точки (тела) относительно других тел, уменьшение которой равно работе соответствующей силы, действующей на точку (тело).
WΠОТЕНЦ_НАЧАЛЬНАЯ - WΠОТЕНЦ_КОНЕЧНАЯ = A
(Обратите внимание на порядок индексов). Потенциальная энергия, как и работа, измеряется в Джоулях. Потенциальная энергия – это энергия, определяемая по- ложением тела. В одном и том же положении тело будет иметь одинаковую потенциальную энергию.
Замечание. Поскольку в определении сказано о разности энергий, то энергию можно определить несколько «произвольным образом» - к определяющим соотношениям можно прибавить любую постоянную величину С, которая при взятии разности пропадет:
(WΠ_НАЧ + C) - (WΠ_КОН + C) = A .

1й курс. 2й семестр. Лекция 4 |
6 |
1)Таким образом, потенциальная энергия определена с точностью до констан- ты. Поэтому нельзя говорить об абсолютном значении потенциальной энергии без указания «начала отсчета» - точки, где указано конкретное значение энергии.
2)Работа консервативной силы не зависит от пути, вдоль которого двигалось тело, а только от него начального и конечного положений. Следовательно, ра-
бота консервативной силы по замкнутому пути равна нулю.
∫ |
|
−WПОТКОН . |
|
(F ,dl ) = WПОТНАЧ |
|||
Путь |
|
|
|
Для замкнутого пути WПОТНАЧ = WПОТКОН |
, поэтому ∫ |
||
(F ,dl ) = 0 . (Кружок в знаке интегра- |
|||
|
Путь |
||
ла показывает, что путь замкнутый.)
Замечание. Нельзя сказать, что если работа силы по замкнутому контуру равна нулю, то эта сила – консервативная. Например, вектор магнитной составляющей силы Лоренца всегда направлен перпендикулярно вектору скорости, поэтому работа этой силы по любой траектории, в том числе и по замкнутой, равна нулю. Но эта сила не является консервативной – она относится к гироскопической.
Рассмотрим две близкие точки в пространстве, смещенные друг от друга на
малый вектор dr = (dx,dy,dz ) , координаты которых ( x, y, z ) и ( x + dx, y + dy, z + dz ) .
Работа консервативной силы F при перемещении между этими точками
A ≈ Fx dx + Fy dy + Fz dz = WПОТНАЧ −WПОТКОН = − (WПОТКОН −WПОТНАЧ ) .
Но изменение потенциальной энергии при перемещении между точками можно записать в виде
|
W КОН −W НАЧ ≈ ( gradW ,dr ) = ∂W dx + |
∂W dy + ∂W dz . |
|
|
|||||||
|
ПОТ |
ПОТ |
|
|
∂x |
|
∂y |
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
или |
|
F dx + F dy + F dz = − ∂W dx − |
∂W dy − |
∂W dz |
|
|
|
||||
|
|
|
|
|
|||||||
|
|
x |
y |
z |
∂x |
∂y |
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Так как вектор dr = (dx,dy,dz ) |
произвольный, то поэтому F = − |
∂W , |
F = − |
∂W , |
|||||||
|
|
|
|
|
|
|
|
x |
∂x |
y |
∂y |
|
|
|
|
|
|
|
|
|
|
||
F = − |
∂W , т.е. для консервативной силы должно выполняться равенство |
|
|||||||||
z |
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= −gradW . |
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
Изоэнергетической поверхностью в пространстве называется поверхность уровня энергии, т.е. поверхность на которой величина энергии остается постоянной. Изоэнергетическая поверхность для потенциальной энергии называется так-
же эквипотенциальной поверхностью.
Таким образом, вектор консервативной силы направлен в сторону скорей- шего убывания потенциальной энергии перпендикулярно эквипотенциальной по- верхности.
Примеры потенциальной энергии.
1) Найдем потенциальную энергию для силы гравитационного взаимодействия
m m
FГРАВ = G 1 2 2 .
R
1й курс. 2й семестр. Лекция 4 |
7 |
Пусть R – радиус-вектор в системе отсчёта, связанной с точкой m1. Тогда вектор гравитационной силы, действующей на материальную точку m2, направлен проти-
|
|
|
m m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|||
воположно R |
FГРАВ |
= -G |
1 2 |
e |
|
, где e |
|
= |
|
|
- единичный вектор направления для |
|
|||||||||||
R2 |
|
||||||||||
|
|
|
R |
R |
|
R |
|
||||
вектора R . Т.к. сила гравитации – консервативная, то должно выполняться равен-
ство
∫ (F ,dr ) = WПОТНАЧ −WПОТКОН .
Путь
Этот интеграл не должен зависеть от траектории, поэтому будем интегрировать
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
вдоль радиус-вектора dr = dR . Векторы F |
|
и dR направлены противоположно, |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ГРАВ |
|
|
|
|
|
|
|
|
|
|
поэтому |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
(FГРАВ ,dr ) = −FГРАВdR . |
|
|
|
|
|
||||||||||
|
|
RКОН |
|
RКОН |
|
m m |
|
|
|
|
m m |
|
RКОН |
|
m m |
|
m m |
||||
|
|
|
|
|
|
||||||||||||||||
∫ (FГРАВ ,dr ) = |
∫ (−FГРАВdR) = ∫ |
−G |
1 2 |
dR |
= G |
1 2 |
|
|
= G |
1 2 |
− G |
1 2 |
|
||||||||
2 |
|
|
|
|
|||||||||||||||||
Путь |
|
R |
|
R |
|
|
R |
|
|
|
|
R |
|
R |
|
RКОН |
|
RНАЧ |
|||
|
|
|
|
|
|
|
|||||||||||||||
|
|
НАЧ |
|
|
НАЧ |
|
|
|
|
|
|
|
|
|
|
НАЧ |
|
|
|
|
|
Сравниваем: W НАЧ −W КОН |
= G |
m1m2 |
− G |
m1m2 |
. |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
ПОТ |
ПОТ |
|
RКОН |
|
|
RНАЧ |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Следовательно, потенциальная энергия гравитационного взаимодействия материальных точек определяется выражением
|
W |
= -G |
m1m2 |
+ С . |
|
|
|||
|
ПОТ.ГРАВ |
|
R |
|
|
|
|
||
Обратите внимание на знак минус! (Обычно принимают, что С=0.) |
||||
2) Для силы тяжести FТ=mg потенциальная энергия WП = mgh |
||||
z |
Здесь высота h определяется выбором начала отсчета энергии. |
|||
|
|
|||
|
Проверим соотношение F = −gradW . |
|||
mg |
В системе отсчёта, связанной с землёй , введем систему координат |
|||
так, чтобы ось z была направлена вверх (против вектора силы тя- |
||||
y |
жести), тогда потенциальная энергия тела равна W = mgz + C , где С |
|||
|
|
|
|
П |
x |
определяется началом отсчета координаты z. |
|
|
|
Эквипотенциальная поверхность – горизонтальная плоскость |
z=const , поэтому вектор силы должен быть направлен ей перпендикулярно, т.е. вертикально. Величина энергии увеличивается вверх, поэтому вектор силы дол-
жен быть направлен вниз. Действительно, F = − |
∂W = 0 , |
F = − |
∂W = 0 , |
||||||
|
|
|
|
x |
|
∂x |
y |
∂y |
|
|
|
|
|
|
|
|
|
||
F = − |
|
= (0,0,−mg ) |
в этой системе координат действи- |
||||||
∂W = −mg . Т.е. вектор силы F |
|||||||||
z |
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тельно направлен вертикально вниз. |
|
|
|
|
|
|
|
||
3) Для силы кулоновского взаимодействия: F |
|
= k |
| q1q2 | |
потенциальная энергия: |
|||||
|
R 2 |
||||||||
|
|
|
|
КУЛ |
|
|
|
||
|
W |
|
= k |
q1q2 |
+ C . |
|
|
||
|
|
|
|
|
|||||
|
ПОТ.КУЛ |
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(Обычно С=0. В случае если заряды разного знака, то потенциальная энергия отрицательна.)

1й курс. 2й семестр. Лекция 4 |
8 |
4) Для силы упругости F = kx потенциальная энергия: W |
|
= k |
x2 |
+ C |
||||||
|
|
|||||||||
У |
|
|
ПОТ.УПР |
|
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
(Обычно С=0.) |
|
|
|
|
|
|
|
|
|
|
Потенциальная энергия для обобщенного закона Гука |
|
|
|
|
|
|
|
|||
Из соотношений x = εl , E = |
kl |
, получаем W |
= k (εl )2 |
= |
kl |
ε2 |
Sl |
|
|
|
|
|
|
|
|||||||
|
S |
ПОТ.УПР |
2 |
|
S 2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Учитывая, что объем деформируемого тела V = Sl , находим энергию при возникновении относительной деформации величиной ε:
WПОТ.УПР = Eε2 V .
2
ЗАКОН СОХРАНЕНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ.
Определение. Полной механической энергией тела (системы) называется энергия, определяемая движением и положением тела относительно других тел, т.е. сумма потенциальной и кинетической энергий
WМЕХАН = WКИН +WПОТ.
Рассмотрим тело, на которое действуют только консервативные силы. Изменение кинетической энергии тела равно суммарной работе действующих на нее сил:
WKИН_КОНЕЧ - WKИН_НАЧ = A .
Но, так как в системе действуют только консервативные силы, то для них можно ввести потенциальную энергию и выразить работу через уменьшение потенциальной энергии:
A = WПОТ_НАЧ - WПОТ_КОНЕЧ .
Следовательно, WKИН_КОНЕЧ - WKИН_НАЧ = A = WПОТ_НАЧ - WПОТ_КОНЕЧ
или WKИН_КОНЕЧ + WПОТ_КОНЕЧ = WПОТ_НАЧ + WKИН_НАЧ . Т.е. WМЕХ_КОНЕЧ = WМЕХ_НАЧ .
Формулировка закона сохранения механической энергии. Если на тело или в сис-
теме тел действуют только консервативные силы, то механическая энергия те-
ла или системы тел остается постоянной.
Пример. Найти величину второй космической скорости для Земли. (Второй кос-
мической скоростью называется наименьшая скорость старта тела с поверхности планеты, при которой тело может улететь от планеты «навсегда» – т.е. уйти на бесконечно большое расстояние, так что сила притяжения к планете обратится в ноль.)
Решение. Когда тело массой m стартует со скоростью V с Земли, полная механи-
ческая энергия системы тело-Земля равна WМЕХ_НАЧ = -G mMЗ + mV2 . (Здесь принято,
R З 2
что постоянная С=0). Предположим, что тело улетело от Земли на бесконечно большое расстояние и там остановилось. Тогда полная механическая энергия должна быть равна нулю. Гравитационная сила является консервативной, поэтому
|
|
|
|
|
|
1й курс. 2й семестр. Лекция 4 |
|
|
|
|
|
9 |
|||||||
в системе планета-тело выполняется закон сохранения механической энергии: |
|||||||||||||||||||
W |
|
= W |
или -G mMЗ + mV2 |
= 0 , откуда V = |
|
2GMЗ |
|
|
|
||||||||||
МЕХ_КОНЕЧ |
|
МЕХ_НАЧ |
|
R З |
|
|
|
2 |
|
|
|
|
|
R З |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
С учетом выражения для ускорения свободного падения близи поверхности Зем- |
|||||||||||||||||||
ли: g = GMЗ |
, получаем V = |
2gR |
|
. Видим, что эта скорость больше первой косми- |
|||||||||||||||
|
R |
2 |
|
|
|
|
З |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
З |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ческой в |
2 .♣ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Таким образом, консервативные силы сохраняют механическую энер- |
||||||||||||||||||
гию. Поэтому они так и называются. (Название «консервативные» – |
переводится |
||||||||||||||||||
как «сохраняющие»). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Помимо консервативных сил в механике вводятся также диссипативные |
||||||||||||||||||
силы - силы «рассеивающие» механическую энергию. Диссипация – |
это перевод |
||||||||||||||||||
энергии упорядоченных процессов в энергию неупорядоченных процессов (в кон- |
|||||||||||||||||||
це концов – |
в тепло). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
К диссипативным силам относятся, в частности, сила трения скольжения и сила |
|||||||||||||||||||
сопротивления движению тела в жидкости или газе. |
|
|
|
|
|
|
|||||||||||||
|
Во всех системах тел, независимо от типа действующих сил, всегда выпол- |
||||||||||||||||||
няется основной закон природы – |
закон сохранения энергии. Энергия замкнутой |
||||||||||||||||||
системы не убывает и не увеличивается – |
она только переходит из одной формы |
||||||||||||||||||
в другую. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пусть в системе действуют консервативные и неконсервативные силы. То- |
||||||||||||||||||
гда |
|
|
|
|
|
|
|
|
−W НАЧ |
= A |
|
+ A |
|
|
|
|
|
|
|
|
|
|
|
|
W |
КОН |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
КИН |
|
КИН |
КОНС |
НЕКОНС |
|
|
|
|
|
|||||
Для консервативных сил A |
|
= W НАЧ |
−W КОН . Поэтому |
|
|
|
|
|
|
||||||||||
|
|
|
|
КОНС |
|
|
|
ПОТ |
|
ПОТ |
|
|
|
|
|
|
|
|
|
WКИНКОН −WКИННАЧ = WПОТНАЧ −WПОТКОН + AНЕКОНС |
|
или WКИНКОН + WПОТКОН − (WКИННАЧ + WПОТНАЧ ) = AНЕКОНС , т.е. |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
W КОН −W |
НАЧ |
= A |
|
. |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
МЕХ |
МЕХ |
НЕКОНС |
|
|
||
|
|
|
|
|
Изменение механической энергии системы равно ра- |
||||||||||||||
|
|
|
|
|
боте неконсервативных сил. |
|
|
|
|
||||||||||
|
|
|
|
|
Пример. Диск массы m и радиуса R скатывается без |
||||||||||||||
|
|
|
|
|
проскальзывания с горки высотой H. Найти скорость |
||||||||||||||
|
H |
|
|
|
диска в конце спуска. (Силой сопротивления воздуха |
||||||||||||||
|
|
|
|
v |
пренебречь). |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
Решение. В данном случае в системе есть сила тре- |
||||||||||||||
|
|
|
|
|
ния, которая заставляет вращаться диск. Но т.к. диск |
||||||||||||||
катится без скольжения, то скорость в точке касания равна нулю. Поэтому мощ- |
|||||||||||||||||||
ность силы трения равна нулю, следовательно, и её работа равна нулю. Тогда |
|||||||||||||||||||
W КОН −W НАЧ |
= A |
= 0 , т.е. W |
КОН |
|
= W |
НАЧ |
или mgH = mv2 |
+ I z ω2 |
. Откуда mgH = 3 mv2 , |
||||||||||
МЕХ |
МЕХ |
НЕКОНС |
|
МЕХ |
|
МЕХ |
|
|
2 |
|
|
2 |
|
|
4 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
v = |
4 gH . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1й курс. 2й семестр. Лекция 4 |
10 |
Пример. Рассмотрим удар двух тел. Под ударом подразумевается кратковремен-
ное взаимодействие тел. Если соударяются два тела конечной массы, то выполняется закон сохранения вектора импульса.
Удары можно подразделить на упругие и неупругие. При упругом (абсо- лютно упругом) ударе сохраняется суммарная кинетическая энергия тел. При не- упругом, соответственно, не сохраняется. При абсолютно неупругом ударе тела слипаются и далее движутся вместе.
По характеру взаимодействия удар можно описать как центральный и не- центральный. При центральном ударе силы взаимодействия направлены вдоль линии, проходящей через центры масс тел. После центрального удара у тел, двигавшихся до удара только поступательно, не будет вращательного движения вокруг центра масс.
По виду движения тел можно ввести прямой и непрямой удары. При прямом ударе существует такая система отсчета, в которой сила взаимодействия направлена вдоль относительной скорости движения тел. В такой системе отсчета при прямом ударе тела до и после удара будут двигаться вдоль одной прямой линии.
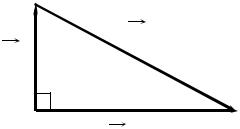
Пример. Тело массой m1 , движущееся со скоростью V налетает на неподвиж-
|
|
ное тело и после упругого центрального соударе- |
|
|
ния отскакивает от него по углом 900 к первона- |
|
|
чальному направлению своего движения со скоро- |
|
p2 |
|
p1 |
|
стью V/2. Определить массу неподвижного тела. |
|
||
|
|
Решение. Перейдем в систему отсчета, в которой |
|
|
плоскость движения совпадает с плоскостью XY |
p0 |
системы отсчета. Так как удар упругий, то сохра- |
|
няется импульс и механическая энергия. Закон со- |
||
хранения импульса: p0 = p1 + p2 , где p0 – начальный импульс налетающего тела, p1 – конечный импульс налетавшего тела, p2 – конечный импульс тела, масса которого неизвестна.
Из рисунка видно, что векторы импульса образуют прямоугольный треугольник.
Поэтому по теореме Пифагора: p2 |
= p2 |
+ p2 |
или m2 V2 |
= m 2 V2 |
+ m |
2 V 2 . |
|||||||||||||||
|
|
|
2 |
|
|
0 |
|
1 |
|
|
|
2 |
|
2 |
1 |
1 |
1 |
||||
|
m V2 |
|
|
m V |
2 |
|
m |
|
V 2 |
|
|
|
|
|
|
||||||
Закон сохранения энергии: |
1 |
|
= |
|
|
1 |
1 |
|
+ |
|
2 |
2 |
. |
|
|
|
|
|
|
||
2 |
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
m2 V2 |
= m 2 V2 + m 2 V |
2 |
|
|
|
|
||||||||||||||
|
|
|
2 |
2 |
|
|
1 |
|
|
|
1 |
1 |
|
|
|
|
|||||
Получили систему уравнений m V2 |
|
|
m V 2 |
|
|
|
m V |
|
2 |
|
|
|
|
||||||||
|
|
|
1 |
|
|
= |
|
1 |
1 |
|
+ |
|
2 2 |
|
|
|
|
|
|||
|
|
2 |
|
|
2 |
|
2 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Второе уравнение умножим на 2m2: m1m2 (V2 - V12 ) = m2 |
2 V2 |
2 и в правую часть под- |
|||||
ставим первое уравнение: m1m2 (V2 - V12 ) = m12 V2 + m12 V12 . |
|
||||||
Отсюда m |
|
= |
m1 |
(V2 + V12 ) |
или с учетом заданных значений скоростей: |
||
2 |
|
|
|||||
|
V2 - V 2 |
||||||
|
|
|
|
|
|
||
|
|
|
|
1 |
|
|
|