

8. Силовой анализ (исследование) механизма
Силы, действующие на звенья механизма
При проектировании и расчете машин необходимо знать и уметь определять все силы, действующие на звенья механизма.
Силы подразделяются на:
а) Движущие силы – силы, приводящие механизм в движение, т.е. совершающие полезную работу
-в двигателях внутреннего сгорания – это сила давления сгорающих газов на поршень;
-в электродвигателях – это вращающий момент, приложенный к ротору со стороны вращающегося электромагнитного поля.
б) Силы полезного сопротивления – это силы, которые совершают требуемую работу, т.е. силы, для преодоления которых создается механизм или машина (привод строгального станка)
в) Силы вредного сопротивления – это силы трения в кинематических парах и силы сопротивления среды (сопротивление воздуха)
г) Силы тяжести – совершают либо положительную, либо отрицательную работу (в зависимости от направления движения звена). Они зависят от размеров звеньев и материалов.
д) Силы инерции – обусловлены массой и движением звеньев с ускорением.
е) Реакции кинематических пар, т.е. силы, с которыми одно звено действует на другое.
Для того чтобы определить все силы, действующие на звенья механизма, сначала определяют структурные группы Ассура (диады).
Принцип Даламбера.
Если к телу, на которое действуют внешние силы и реакции связей, приложить силы инерции, то можно условно рассматривать это тело как находящееся в равновесии.
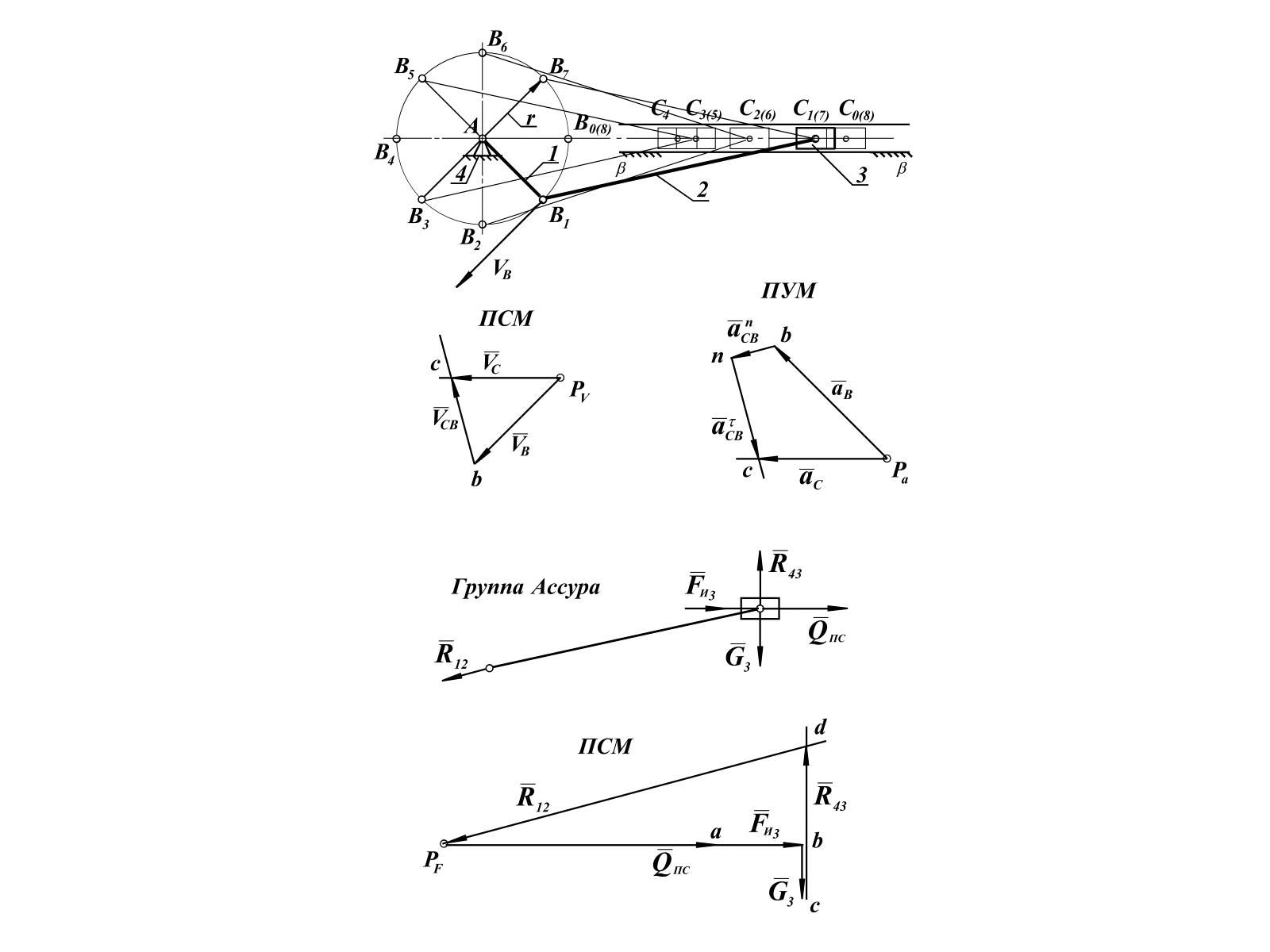
Рассмотрим силы, которые действуют на диаду шатун-ползун:
![]()
Рисунок 2.3 – План положений, скоростей, ускорений и план сил механизма
G3 - вес ползуна;
Qпс - сила полезного сопротивления;
Fи3 - сила инерции ползуна 3;
R1 2 - реакция со стороны отброшенного кривошипа 1 на шатун 2;
R4 3 – реакция, действующая со стороны звена 4 на звено 3.
1) Составляем векторное уравнение.
Под действием указанных сил группа Ассура находится в равновесии, описываемом векторным уравнением:
![]() ,
,
![]() - дается по заданию,
известна по величине и направлению
(противоположно скорости ползуна);
- дается по заданию,
известна по величине и направлению
(противоположно скорости ползуна);
![]() - известна по
величине и направлению;
- известна по
величине и направлению;
![]() - известна по
величине и направлению (направленная
противоположно ускорению ползуна);
- известна по
величине и направлению (направленная
противоположно ускорению ползуна);
R1 2 – известна по направлению (параллельно шатуну 2);
R43 – известна по направлению (перпендикулярно направляющей ползуна).
2)
Проводим вектор силы полезного
сопротивления
![]() (отрезок
(отрезок
![]() длиной 70 мм).
длиной 70 мм).
3) Определяем масштаб плана сил механизма:
![]() .
.
4) С
учетом масштаба определяем отрезок
![]() ,
отображающий силу инерции ползуна, и
отрезок
,
отображающий силу инерции ползуна, и
отрезок
![]() ,
отображающий силу тяжести полуна:
,
отображающий силу тяжести полуна:
![]() ,
, ![]() .
.
5) Из
полюса плана сил
![]() параллельно шатуну 2 проводим линию
действия реакции кривошипа на шатун
параллельно шатуну 2 проводим линию
действия реакции кривошипа на шатун
![]() ,
а из точки
,
а из точки
![]() - направление действия реакции направляющей
- направление действия реакции направляющей
![]() на ползун
на ползун
![]() .
Таким образом, получаем точку их
пересечения
.
Таким образом, получаем точку их
пересечения
![]() ,
отсекающую отрезки
,
отсекающую отрезки
![]() и
и
![]() .
.
6) Величины реакций находим с учетом масштаба плана сил механизма:
![]()
![]() ;
; ![]() .
.
7) Определим движущий момент и мгновенную мощность.
Определим
плечо h*
силы
![]() относительно точки А и вычислим с учетом
масштаба его длину h
(mL
1:1).
относительно точки А и вычислим с учетом
масштаба его длину h
(mL
1:1).
![]()
Тогда
движущий момент, создаваемый реакцией
![]() на плече h,
будет равен:
на плече h,
будет равен:![]() .
.
Мгновенная
мощность составит:![]()