

3.2 Вращение твердого тела вокруг неподвижной оси
Это движение, при котором все точки тела движутся по окружностям, центры которых лежат на оси вращения.
П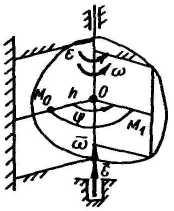 оложение
тела задается двугранным углом
(углом поворота).
оложение
тела задается двугранным углом
(углом поворота).
= (t) - уравнение движения.
Кинематические характеристики тела:
![]() -
угловая скорость, с-1;
-
угловая скорость, с-1;
![]() -
угловое ускорение, с-2.
-
угловое ускорение, с-2.
Величины
и
можно представить в
виде
векторов
![]() ,
расположенных на оси вращения, направление
вектора
,
расположенных на оси вращения, направление
вектора
![]() таково, что с его конца вращение тела
видно происходящим против часовой
стрелки. Направление
таково, что с его конца вращение тела
видно происходящим против часовой
стрелки. Направление![]() совпадает с
совпадает с
![]() , если
, если
![]() >о.
>о.
П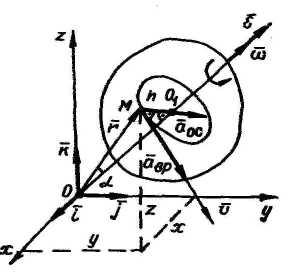 оложение
точки тела: M0M1
= S
= h.
оложение
точки тела: M0M1
= S
= h.
Скорость
точки
![]() ;
при этом
;
при этом
![]() .
.
откуда
![]() ;
;![]() ;
;![]() .
.
Ускорение
точки тела
![]() ,
,![]() ‑ вращательное
ускорение (в кинематике точки –
касательное ‑
‑ вращательное
ускорение (в кинематике точки –
касательное ‑![]() ):
):
![]() -
осестремительное ускорение (в кинематике
точки - нормальное -
-
осестремительное ускорение (в кинематике
точки - нормальное -![]() ).
).
Модули:
![]() ;
;
![]() ;
;
![]()
![]() .
.
Равномерное и равнопеременное вращение
1.
Равномерное:
= const,
![]() ;
; ;
;![]() - уравнение движения.
- уравнение движения.
2.
Равнопеременное:
= const,
![]() ;
; ;
;![]() ;
; ;
;![]() - уравнение движения.
- уравнение движения.
2 ).
Механический привод состоит из шкива
1, ремня 2 и ступенчатых колес 3 и 4. Найти
скорость рейки 5, а также ускорение
точкиM
в момент времени t1
= 1с. Если угловая скорость шкива
равна 1
= 0,2t
, с-1;
R1 = 15;
R3 = 40;
r3 =
5; R4 = 20;
r4 =
8
(в
сантиметрах).
).
Механический привод состоит из шкива
1, ремня 2 и ступенчатых колес 3 и 4. Найти
скорость рейки 5, а также ускорение
точкиM
в момент времени t1
= 1с. Если угловая скорость шкива
равна 1
= 0,2t
, с-1;
R1 = 15;
R3 = 40;
r3 =
5; R4 = 20;
r4 =
8
(в
сантиметрах).
Решение
Скорость рейки
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Откуда
![]() ;
;
![]() ;
;
![]() ,
с-1.
,
с-1.
Из
(1) и (2) получим
![]() ,
см.
,
см.
Ускорение
точки M
![]() .
.
![]() ,
с-2
при t1
= 1 с; a
= 34,84 см/с2.
,
с-2
при t1
= 1 с; a
= 34,84 см/с2.
3.3 Плоскопараллельное (плоское) движение твердого тела
Э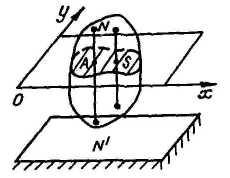 то
движение, при котором все точки тела
движутся в плоскостях, параллельных
некоторой неподвижной плоскости.
то
движение, при котором все точки тела
движутся в плоскостях, параллельных
некоторой неподвижной плоскости.
Все точки тела на любой прямой, перпендикулярной неподвижной плоскости, движутся одинаково. Поэтому анализ плоского движения тела сводится к исследованию движения плоской фигуры (сечение S) в ее плоскости (xy).
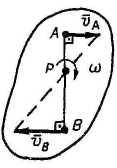
Это движение можно представить как совокупность поступательного движения вместе с некоторой произвольно выбранной точкой а, называемой полюсом, и вращательного движения вокруг полюса.
Уравнения движения плоской фигуры
xа = xa(t); уа = уа; j = j(t)
Кинематические характеристики плоской фигуры:
![]()
 -
скорость и ускорение полюса; w,
e
-
угловая скорость и угловое ускорение
(не зависят от выбора полюса).
-
скорость и ускорение полюса; w,
e
-
угловая скорость и угловое ускорение
(не зависят от выбора полюса).
У равнения
движения любой точки
плоской фигуры (B)
можно получить, проектируя векторное
равенство
равнения
движения любой точки
плоской фигуры (B)
можно получить, проектируя векторное
равенство
![]() на осиx
и у
на осиx
и у
x1B, y1B - координаты точки в системе координат, связанной с фигурой.
Определение скоростей точек
1). Аналитический способ.
Зная
уравнения движения xn
= xn(t);
yn
= yn(t),
находим
![]() ;
;
![]() ;
;
![]() .
.
2). Теорема о распределении скоростей.
Д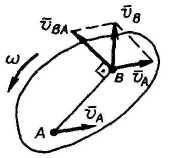
 ифференцируя
равенство
ифференцируя
равенство![]() ,
получим
,
получим![]() ,
,
![]() -
скорость точки B
при вращении плоской фигуры вокруг
полюса A;
-
скорость точки B
при вращении плоской фигуры вокруг
полюса A;
![]() ;
;
![]()
Формула
распределения скоростей точек плоской
фигуры
![]() .
.
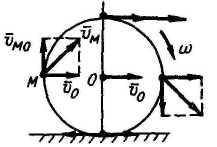
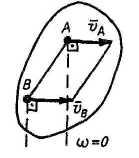
Пример
С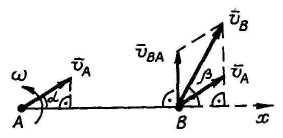 корость
точкиM
колеса, катящегося без скольжения
корость
точкиM
колеса, катящегося без скольжения
![]() ;
;
![]() .
.
3). Теорема о проекциях скоростей.
Проекции
скоростей двух точек тела на ось,
проходящую через эти точки, равны.
Проектируя
равенство
![]() на осьx,
имеем
на осьx,
имеем
П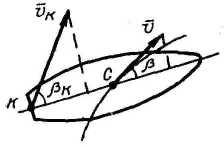 ример
ример
Определить
скорость натекания воды vН
на руль корабля, если известны
![]() (скорость
центра тяжести судна),b
и bK
(углы дрейфа).
(скорость
центра тяжести судна),b
и bK
(углы дрейфа).
Решение:
![]() .
.
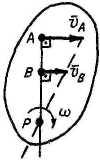
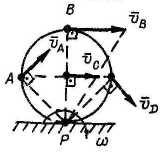
4). Мгновенный центр скоростей (МЦС).
Скорости точек при плоском движении тела можно определять по формулам вращательного движения, используя понятие МЦС.
МЦС - точка, связанная с плоской фигурой, скорость которой в данный момент времени равна нулю (vp = 0).
В общем случае МЦС - точка пересечения перпендикуляров к направлениям скоростей двух точек фигуры.
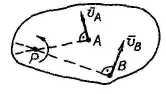
Принимая точку P за полюс, имеем для произвольной точки
 ,
тогда
,
тогда
Откуда
![]() -
угловая скорость фигуры и
-
угловая скорость фигуры и![]() ,т.е.
скорости точек плоской фигуры
пропорциональны их расстояниям до
МЦС.
,т.е.
скорости точек плоской фигуры
пропорциональны их расстояниям до
МЦС.
|
Возможные случаи нахождения МЦС | |||
|
а |
б |
в Качение без скольжения | |
|
|
|
|
|
|
|
МЦС - в бесконечности |
| |
Случай б соответствует мгновенно поступательному распределению скоростей.
Примеры
1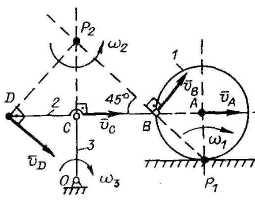 ).
Для заданного положения механизма найтиvB,
vC,vD,
w1,
w2,
w3,
если в данный момент vA
= 20 см/с; BC
= CD
= 40 см; OC
= 25 см; R
= 20 см.
).
Для заданного положения механизма найтиvB,
vC,vD,
w1,
w2,
w3,
если в данный момент vA
= 20 см/с; BC
= CD
= 40 см; OC
= 25 см; R
= 20 см.
Решение МЦС катка 1 - точка P1:
![]() с-1;
с-1;
![]() см/с.
см/с.
МЦС звена 2 - точка P2 пересечения перпендикуляров к направлениям скоростей точек B и C:
![]()
 с-1;
с-1;
![]() см/с;
см/с;![]() см/с;
см/с;![]() с-1.
с-1.
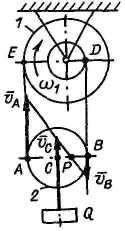
2). Груз Q поднимается с помощью ступенчатого барабана 1, угловая скорость которого w1 = 1 с-1; R1 = 3r1 = 15 см; AE || BD. Найти скорость vC оси подвижного блока 2.
Решение
Находим скорости точек A и B:
vA = vE = w1*R1 = 15 см/с; vB = vD = w1*r1 = 5 см/с.
MЦС
блока 2 - точка P.
Тогда
![]() ,
откуда
,
откуда![]() ;
;![]() ;
;![]() см/с.
см/с.