

2.3.1. Полный факторный эксперимент (пфэ)
Рассмотрим
основные понятия теории планирования
эксперимента. Исследуемый объект (над
которым проводится эксперимент) будем
представлять в виде модели «черного
ящика» с входами
![]() и выходами
и выходами![]() .
.
Цель
эксперимента - изучение влияния переменных
![]() на
на![]() .
Входы
.
Входы![]() называются факторами (независимые,
экзогенные переменные); выходы
называются факторами (независимые,
экзогенные переменные); выходы![]() - реакция/отклик (параметр оптимизации,
целевая функция, эндогенные переменные).
- реакция/отклик (параметр оптимизации,
целевая функция, эндогенные переменные).
Фактор может принимать одно из нескольких значений-уровней. Фиксированный набор уровней факторов определяет одно из возможных состояний системы и представляет собой условия проведения одного из возможных опытов одного эксперимента - точка в факторном пространстве. Факторное пространство - это координатное пространство, на осях которого откладывают значения исследуемых факторов. Если перебрать все возможные наборы состояний системы, то мы получим полное множество состояний - число возможных опытов. Математическая модель объекта - это функциональная зависимость
![]() ,
(2.14)
,
(2.14)
которая называется функцией отклика, а ее геометрический образ - поверхностью отклика.
В общем случае, когда исследование модели ведется при неполном знании механизма изучаемых явлений, аналитическое выражение функции (2.14) неизвестно. Наибольшее в этом случае применение нашли модели в виде полиномов
 (2.15)
(2.15)
с
теоретическими коэффициентами регрессии
![]() .
Функция отклика может иметь и более
сложную зависимость от факторов.
Некоторые из них удается привести к
линейному виду. Такими моделями являются
мультипликативная регрессионная,
экспоненциальная и др. Если выбрана
модель планирования, т.е. выбран вид
функции (2.15) и записано уравнение, то
остается спланировать и провести
эксперимент для оценки числовых значений
коэффициентов этого уравнения.
.
Функция отклика может иметь и более
сложную зависимость от факторов.
Некоторые из них удается привести к
линейному виду. Такими моделями являются
мультипликативная регрессионная,
экспоненциальная и др. Если выбрана
модель планирования, т.е. выбран вид
функции (2.15) и записано уравнение, то
остается спланировать и провести
эксперимент для оценки числовых значений
коэффициентов этого уравнения.
План
эксперимента, позволяющий вычислить
коэффициенты линейного уравнения
регрессии, называют планом
первого порядка.
План
эксперимента, позволяющий вычислить
коэффициенты полного уравнения регрессии
![]() -й
степени, будетпланом
-й
степени, будетпланом
![]() -го
порядка.
-го
порядка.
Каждый
фактор
![]() меняется в определенном диапазоне
меняется в определенном диапазоне![]() ,
а фактически принимает ряд
,
а фактически принимает ряд![]() значений из этого диапазона. Общее число
возможных экспериментов дается
соотношением
значений из этого диапазона. Общее число
возможных экспериментов дается
соотношением
![]() ,
(2.16)
,
(2.16)
а
при одинаковом значении фиксированных
значений (уровней) для всех факторов
![]()
![]() (2.17)
(2.17)
Эксперимент,
при котором реализуются все возможные
сочетания факторов, принято называть
полным
факторным экспериментом
(ПФЭ). Из выражения (2.17) следует, что в
многофакторных задачах при нескольких
фиксированных уровнях факторов общее
число экспериментов оказывается
чрезвычайно большим. На практике обычно
используют планы, предусматривающие
фиксирование всех факторов на двух
(планы
![]() )
или, существенно реже, на трех (планы
)
или, существенно реже, на трех (планы![]() )
уровнях.
)
уровнях.
При
составлении плана ПФЭ
![]() для каждого фактора выбирается нулевой
(базовый) уровень
для каждого фактора выбирается нулевой
(базовый) уровень![]() ,
соответствующийцентру
эксперимента. Обычно, но не обязательно,
он выбирается в центре диапазона
варьирования:
,
соответствующийцентру
эксперимента. Обычно, но не обязательно,
он выбирается в центре диапазона
варьирования:
![]()
Выбирается
шаг варьирования
![]() ,
характеризующий отклонение фактора от
нулевого уровня. Эксперимент проводится
при двух значениях факторов
,
характеризующий отклонение фактора от
нулевого уровня. Эксперимент проводится
при двух значениях факторов![]() и
и![]() :
:
![]() .
.
Шаг варьирования выбирается на основе опыта и интуиции исследователя и обычно составляет
![]() .
.
Для облегчения расчетов удобно провести нормировку факторов с
помощью преобразования
![]() .
.
При
этом нижнее и верхнее значение фактора
![]() равны -1 и +1:
равны -1 и +1:
![]() .
.
Расположение
экспериментов при планировании
![]() показано на рис.2.9, а соответствующая
матрица планирования приведена в
табл.2.3.
показано на рис.2.9, а соответствующая
матрица планирования приведена в
табл.2.3.
Строки матрицы соответствуют различным экспериментам, а столбцы значениям факторов. Для упрощения и унификации записи условий экспериментов и облегчения обработки данных в матрицах планирования обычно вместо -1 и +1 записывают: на нижнем уровне «-» и на верхнем уровне «+».
Планирование
![]() позволяет определить четыре коэффициента
уравнения регрессии. Модель может быть
представлена в виде неполного квадратного
уравнения, включающего свободный член,
линейные эффекты и эффект двойного
взаимодействия факторов
позволяет определить четыре коэффициента
уравнения регрессии. Модель может быть
представлена в виде неполного квадратного
уравнения, включающего свободный член,
линейные эффекты и эффект двойного
взаимодействия факторов
![]() .
.
В
табл.3.1 добавлен столбец фиктивной
переменной
![]() ,
необходимый для оценки свободного члена
,
необходимый для оценки свободного члена![]() .
.
План, в котором число экспериментов равно числу определяемых коэффициентов, называется насыщенным.
После
реализации плана получают 4 уравнения
с 4 неизвестными, их решение и даст оценку
всех 4 коэффициентов уравнения регрессии
![]() .
.
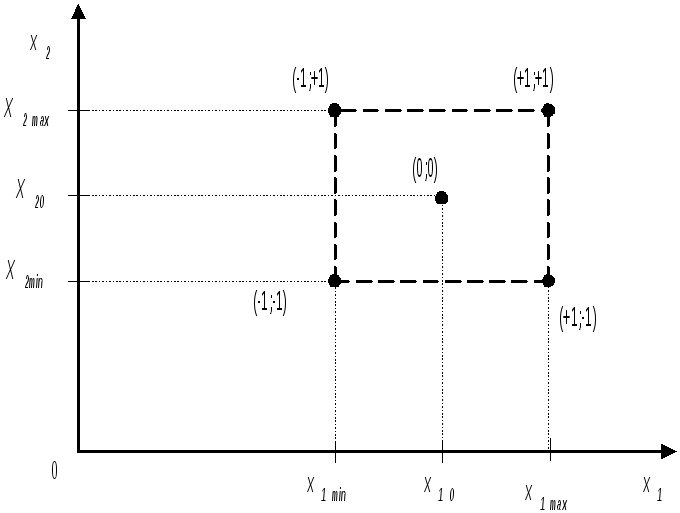
Рис.2.9.
План эксперимента
![]()
Таблица 2.3
Матрица планирования полного факторного эксперимента
для двух факторов
-
№
эксперимента
План ПЭФ
Отклик
y
1
+
–
–
+
2
+
+
–
–
3
+
–
+
–
4
+
+
+
+
Пример. Одна из основных целей в теории эксперимента - это оптимальное использование факторного пространства.
Проиллюстрируем идею на простом примере - задаче о взвешивании трех объектов A, B, C. Традиционно эксперимент проводится по следующей схеме:
|
№ опыта |
A |
B |
C |
Результат взвешивания |
|
1 |
- |
- |
- |
|
|
2 |
+ |
- |
- |
|
|
3 |
- |
+ |
- |
|
|
4 |
- |
- |
+ |
|
где «+» - объект положен на весы; «-» - объект отсутствует на весах.
Сначала проводится «холостое» взвешивание — определяется нулевая точка весов, затем по очереди взвешиваются все объекты. Это пример однофакторного эксперимента - здесь изучается поведение каждого фактора в отдельности. Вес определяется по результатам двух опытов:
![]() .
.
Дисперсия результатов взвешивания:
![]()
где
![]() — дисперсия ошибки взвешивания.
— дисперсия ошибки взвешивания.
Рассмотрим другую схему проведения эксперимента.
|
№ опыта |
A |
B |
C |
Результат взвешивания |
|
1 |
+ |
- |
- |
|
|
2 |
- |
+ |
- |
|
|
3 |
- |
- |
+ |
|
|
4 |
+ |
+ |
+ |
|
Вес каждого тела определяется по формулам:
В числители стоят элементы последнего столбца со знаками, указанными в соответствующих столбцах А, В, С. Мы видим, что при вычислении, скажем, веса А он входит в числитель два раза, и поэтому в знаменателе стоит число 2. Вес объекта А, вычисленный по приведенной выше формуле, оказывается неискаженным весами объектов В и С, так как вес каждого из них входит в формулу для веса объекта А дважды и с разными знаками.
Дисперсия результатов взвешивания по новой схеме
![]()
При новой схеме взвешивания дисперсия вдвое меньше, хотя в каждом случае выполнялось по четыре эксперимента.
Увеличение точности эксперимента в два раза происходит по той причине, что в первом случае вес определялся по результатам двух экспериментов, во втором случае - по результатам всех четырех.
Вторая схема эксперимента — многофакторная: здесь оперируют всеми факторами так, чтобы каждый вес вычислять по результатам всех опытов, проведенных в данной серии экспериментов.
Матрица ПФЭ обладает следующими свойствами:
Свойство симметричности: алгебраическая сумма элементов вектор - столбца каждого фактора равна нулю (за исключением столбца, соответствующему свободному члену)
![]() ,
,
где i – номер фактора; j – номер эксперимента.
Свойство нормирования: сумма квадратов элементов каждого столбца равна числу опытов
![]() .
.
Свойство ортогональности; скалярное произведение всех вектор – столбцов (сумма почленных произведений элементов любых двух векторов – столбцов матрицы) равно нулю
![]() .
.
Рототабельность матрицы, т.е все точки в матрице планирования подбираются так, чтобы точность предсказания значений параметра оптимизации была одинакова на равных расстояниях от центра эксперимента и не зависела от направления.
Планы, для которых выполняется условие (с), называются ортогональными. Благодаря этому свойству резко уменьшаются трудности, связанные с расчетом коэффициентов уравнения регрессии.
Поскольку результаты наблюдений носят случайный характер, то для повышения точности результатов целесообразно при каждом сочетании факторов проводить не один, а несколько экспериментов и в качестве выходного значения функции отклика принимать их среднее. План такого эксперимента для случая двух факторов и трех экспериментов приведен в табл.2.4.
Таблица 2.4
|
Номер эксперимента |
|
План ПЭФ
|
|
Результат |
Среднее | |||
|
|
|
1 |
2 |
3 | ||||
|
1 |
+ |
– |
– |
+ |
|
|
|
|
|
2 |
+ |
+ |
– |
– |
|
|
|
|
|
3 |
+ |
– |
+ |
– |
|
|
|
|
|
4 |
+ |
+ |
+ |
+ |
|
|
|
|
Порядок проведения всех (в данном случае 12-ти) экспериментов должен быть рандомизирован, т.е. определен с помощью таблицы случайных чисел, что позволяет исключить влияние временного дрейфа характеристик исследуемой системы. Делается это следующим образом. Выбирается произвольный участок таблицы случайных чисел, и последовательно просматриваются его строки или столбцы с любого места. Последовательность (очередность) проведения экспериментов назначается в соответствии с очередностью появления чисел 1, … ,N при просмотре участка таблицы. Числа, большие по значению, чем номера экспериментов, пропускаются. Повторяющиеся числа учитываются лишь первый раз, а далее также пропускаются.
Переход
к планированию
![]() требует двукратного повторения
планирования
требует двукратного повторения
планирования![]() ,
причем в первом случае
,
причем в первом случае![]() поддерживается на нижнем, а во втором
на верхнем уровне (рис.2.10). Матрица
планирования приведена в табл. 2.5.
поддерживается на нижнем, а во втором
на верхнем уровне (рис.2.10). Матрица
планирования приведена в табл. 2.5.
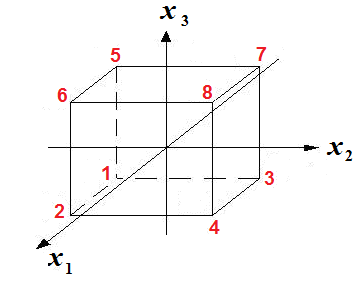
Рис.
2.10. План эксперимента
![]()
Таблица 2.5
Матрица планирования полного факторного эксперимента
для трех факторов
|
Номер эксперимента |
|
План
ПЭФ
|
|
|
|
|
Реакция y | ||
|
|
|
| |||||||
|
1 |
+ |
- |
- |
- |
+ |
+ |
+ |
- |
y1 |
|
2 |
+ |
+ |
- |
- |
- |
- |
+ |
+ |
y2 |
|
3 |
+ |
- |
+ |
- |
- |
+ |
- |
+ |
y3 |
|
4 |
+ |
+ |
+ |
- |
+ |
- |
- |
- |
y4 |
|
5 |
+ |
- |
- |
+ |
+ |
- |
- |
+ |
y5 |
|
6 |
+ |
+ |
- |
+ |
- |
+ |
- |
- |
y6 |
|
7 |
+ |
- |
+ |
+ |
- |
- |
+ |
- |
y7 |
|
8 |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
y8 |
Модель может быть представлена в виде
![]() .
.
И включает в себя свободный член, линейные эффекты, эффекты двойного взаимодействия и эффекты тройного взаимодействия.
Аналогично
можно построить матрицы планирования
![]() для задач большей размерности. При этом
дважды повторяется планирование меньшей
размерности
для задач большей размерности. При этом
дважды повторяется планирование меньшей
размерности![]() ,
причем первый раз новый фактор берется
на нижнем, а второй раз на верхнем уровне.
,
причем первый раз новый фактор берется
на нижнем, а второй раз на верхнем уровне.
Для
компактной записи плана эксперимента,
а также отдельных экспериментов
используются буквенное обозначение –
код эксперимента. Каждому из варьируемых
факторов сопоставляется буква латинского
алфавита
![]() ,
и в буквенное обозначение выносятся
буквы, соответствующие факторам,находящимся
на верхнем уровне.
,
и в буквенное обозначение выносятся
буквы, соответствующие факторам,находящимся
на верхнем уровне.
Так,
для факторов планирования ![]() код ab
указывает на то, что на верхнем уровне
заданы факторы
код ab
указывает на то, что на верхнем уровне
заданы факторы
![]() и
и![]() ,
а фактор
,
а фактор![]() находится на нижнем уровне. Кодbc
означает, что фактор
находится на нижнем уровне. Кодbc
означает, что фактор
![]() находится на нижнем уровне, а факторы
находится на нижнем уровне, а факторы![]() -
на верхнем уровне. Для эксперимента,
где все факторы заданы на нижнем уровне,
используется обозначение (1).
-
на верхнем уровне. Для эксперимента,
где все факторы заданы на нижнем уровне,
используется обозначение (1).
Полные
факторные эксперименты ![]() и
и![]() можно задать кодами
можно задать кодами
(1), a, b, ab;
(1), a, b, ab, c, ac, bc, abc.