

5.3. Основные соотношения параксиальной оптики
Основные соотношения параксиальной оптикисвязывают между собой фокусные расстояния, положение и размеры предмета и изображения, угловое, линейное и продольное увеличения.
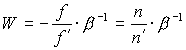
5.3.1. Зависимость между положением и размером предмета и изображения
|
Линейное
увеличение: Формула Ньютона:
Формула отрезков или формула Гаусса:
|
|
 или
или

5.3.2. Угловое увеличение и узловые точки
|
Выражение для вычисления углового увеличения:
Узловые точки– это точки, в которых угловое увеличение равно единице. |
|

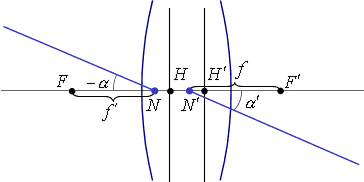
Чтобы найти узловые точки
![]() и
и![]() ,
от переднего фокуса откладывается
заднее фокусное расстояние, а от заднего
фокуса откладывается переднее фокусное
расстояние. Отрезки
,
от переднего фокуса откладывается
заднее фокусное расстояние, а от заднего
фокуса откладывается переднее фокусное
расстояние. Отрезки![]() и
и![]() равны.
Если
равны.
Если![]() ,
то узловые точки совпадают с главными.
,
то узловые точки совпадают с главными.
Линейное и угловое увеличение сязаны соотношением:
|

5.3.3. Частные случаи положения предмета и изображения
Рассмотрим различные положения предмета
и изображения (различные
![]() и
и![]() ):
):
 :
: ,
, ,
, .
Предмет и изображение – этоглавные
плоскости.
.
Предмет и изображение – этоглавные
плоскости. :
: ,
, ,
, .
Предмет и изображение – этоузловые
точки.
.
Предмет и изображение – этоузловые
точки. :
: ,
, ,
, .
Предмет находится на двойном фокусном
расстоянии.
.
Предмет находится на двойном фокусном
расстоянии. :
: ,
, ,
, .
Предмет находится впереднем
фокусе, а изображение – в
бесконечности.
.
Предмет находится впереднем
фокусе, а изображение – в
бесконечности. :
: ,
, ,
, .
Предмет находится на бесконечности, а
изображение – взаднем
фокусе.
.
Предмет находится на бесконечности, а
изображение – взаднем
фокусе.
5.3.4. Связь продольного увеличения с поперечным и угловым
|
Продольное увеличение:
Угловое увеличение:
|
|
Если оптическая система находится в
однородной среде (![]() ),
то:
),
то:![]() ,
,![]()
5.3.5. Диоптрийное исчисление
Диоптрийное исчисление– это
измерение продольных отрезков в обратных
единицах (диоптриях): ,
,![]() где
где![]() –
приведенная длина.
–
приведенная длина.
Одна диоптрия соответствует приведенному отрезку в 1м. Если отрезок измеряется в мм, то обратный отрезок измеряется в килодиоптриях.
Соотношение для приведенных отрезков
в пространстве предметов (![]() )
и изображений (
)
и изображений (![]() )
иоптической
силы, измеряемых в диоптриях:
)
иоптической
силы, измеряемых в диоптриях:
|
5.3.6. Инвариант Лагранжа-Гельмгольца
|
Инвариант Лагранжа-Гельмгольца связывает линейный размер предмета и угловой размер пучка лучей. Эта величина инвариантна, то есть неизменна в любом пространстве:
Инвариант Лагранжа-Гельмгольца характеризует информационную емкость оптической системы, то есть величину пространства, которое может быть отображено оптической системой. Этот инвариант математически выражает закон сохранения информации в геометрической оптике. |
|
6. Матричная теория Гауссовой оптики
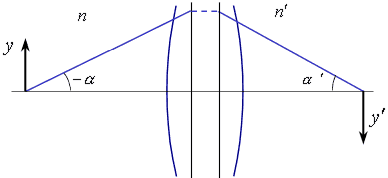
6.1. Преобразование координат лучей оптической системой
6.1.1. Координаты лучей в пространстве предметов и пространстве изображений
Опорная плоскость(ОП) – это некоторая произвольно выбранная плоскость, перпендикулярная оптической оси. Опорные плоскости в пространстве предметов и изображений выбираются из соображений удобства и могут быть либо сопряженными, либо нет.
|
В параксиальной
оптикелуч может быть однозначно
определен через линейную координату Аналогично,
луч в пространстве изображений
описывается линейной координатой
|
|

6.1.2. Преобразование координат оптических лучей
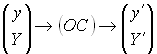
Действие оптической системы заключается
в преобразовании координат лучей:
Для идеальной оптической системы:
|
6.2. Матрица преобразования лучей
6.2.1. Общий вид матрицы преобразования (ABCD-матрица)
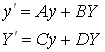
Преобразование координат луча оптической системой можно представить в виде умножения некоторой матрицы на вектор входных координат луча:
|
или |
|

где
![]() –
вектор-столбец входных координат,
–
вектор-столбец входных координат,![]() –
вектор-столбец выходных координат,
–
вектор-столбец выходных координат,![]() –матрица преобразования лучей(гауссова матрицаили ABCD-матрица):
–матрица преобразования лучей(гауссова матрицаили ABCD-матрица):

6.2.2. Геометрический смысл элементов матрицы преобразования
Матрица преобразования имеет следующий вид:
|
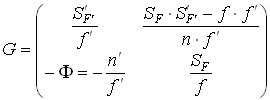
Элемент матрицы
![]() зависит
только от параметров оптической системы,
а элементы
зависит
только от параметров оптической системы,
а элементы![]() ,
,![]() и
и![]() зависят
еще и от выбораопорных
плоскостей.
зависят
еще и от выбораопорных
плоскостей.
Определитель матрицы преобразования
Определитель матрицы преобразования любой оптической системы равен единице:
|
Обратная матрица преобразования
Обратная матрица преобразования
описывает обратное преобразование (из
выходных координат во входные):
 или
или![]()
Обратная матрица преобразования имеет
следующий вид:
Условие сопряжения опорных плоскостей
Для случая сопряженныхопорных плоскостей элемент![]() ,
элемент
,
элемент![]() имеет
значениелинейного
увеличения, а элемент
имеет
значениелинейного
увеличения, а элемент![]() -
величина обратная элементу
-
величина обратная элементу![]() .
.
6.2.3. Виды матриц преобразования
Существуют два основных вида матриц преобразования, описывающих два простых преобразования – перенос луча в свободном пространстве и преломление луча на преломляющей поверхности или в оптической системе.
Матрица преломления
Если совместить опорные плоскости с
главными плоскостями (![]() ,
,![]() ),
то матрица преобразования имеет смыслматрицы преломления. Матрица
преломления описывает преломление луча
оптической системой, при этом у луча
изменяется только угловая координата:
),
то матрица преобразования имеет смыслматрицы преломления. Матрица
преломления описывает преломление луча
оптической системой, при этом у луча
изменяется только угловая координата:
|

Матрица переноса
При переносе луча изменяется только линейная координата. В этом случае матрица преобразования имеет смысл матрицы переноса:
|

где
![]() –
приведенное расстояние между опорными
плоскостями.
–
приведенное расстояние между опорными
плоскостями.
6.2.4. Матрица одной преломляющей поверхности
Для преломляющей поверхности опорные плоскостисовпадают сглавными плоскостями, и составляют одну плоскость, касательную к поверхности. Оптическая сила сферической преломляющей поверхности:
|
где
![]() –
кривизна поверхности.
–
кривизна поверхности.
Матрица преломления сферической поверхности:
|
6.2.5. Матрица зеркальной (отражающей) поверхности
Матрица преломления зеркальной
поверхности:
 где
где![]() –
кривизна поверхности,
–
кривизна поверхности,![]() –
показатель преломления среды.
–
показатель преломления среды.
|
В случае плоского
зеркала ( |

6.3. Матрицы оптической системы, состоящей из нескольких компонентов
|
Любую оптическую систему можно представить как совокупность нескольких компонентов, разделенных промежутками. Матрица
такой системы будет состоять из
произведения матриц преломления
где
|
|
 ,
, .
.
Если между компонентами нет промежутков
(![]() ),
то матрица переноса между этими
компонентами становится единичной
),
то матрица переноса между этими
компонентами становится единичной![]() .
Еслиоптическая
силакомпонента равна нулю
.
Еслиоптическая
силакомпонента равна нулю![]() ,
то матрица преломления для этого
компонента также становится единичной
,
то матрица преломления для этого
компонента также становится единичной![]() .
.
Каждый из компонентов может быть разложен по этой же схеме на более простые составляющие (вплоть до отдельных поверхностей).