

Методичка_Сигналы
.pdf11
Наиболее распространенными непрерывными модуляциями являются гармонические модуляции, в которых в качестве переносчика выступает гармоническое колебание
U A, , ,t A cos t , |
(1.4) |
где A – амплитуда гармонического колебания;– частота;– фаза;
t – время или текущая пространственная координата;
Сигнал-переносчик для такого вида модуляций называют несущим и, как видно из выражения (1.4), он является функцией трех параметров A, , , каждый из которых может быть выбран в качестве информационного.
Если в качестве информационного параметра используется амплитуда А, то говорят об амплитудной модуляции, при которой модулированный по амплитуде сигнал SA t можно описать выражением:
SA t A x t cos t , |
(1.5) |
где x t – модулирующий сигнал, соответствующий передаваемому сообщению.
Если в качестве информационного параметра используют частоту , то такой вид гармонической модуляции называют частотным. При этом виде модуляции частота
несущей является функцией модулирующего сигнала x t |
и модулированный по |
частоте сигнал Sч t может быть представлен выражением: |
|
Sч t A cos x t t . |
(1.6) |
В качестве информационного параметра может быть |
выбрана фаза сигнала- |
переносчика ( ). В этом случае говорят о фазовой модуляции и сигнал, модулированный по фазе Sф t представляется в виде:
Sф t A cos t x t |
(1.7) |
Применяют и комбинированные виды гармонической модуляции, при которых в соответствии с изменением передаваемого сигнала одновременно меняются два параметра сигнала-переносчика, например, амплитуда и частота. Однако во всех случаях один из параметров не должен изменяться, чтобы играть роль параметра селекции, иначе модулированный сигнал нельзя будет выделить на фоне помех и множества иных подобных сигналов.
12
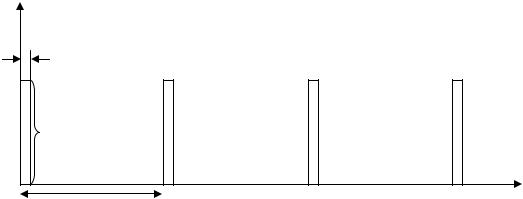
Часто в качестве сигнала-переносчика используют детерминированную последовательность импульсов, параметры которой меняются в зависимости от передаваемого сообщения. Такие виды модуляции называют импульсными, и они могут быть отнесены к классам 2, приведенной классификации (Таблица 1.1).
Детерминированная последовательность импульсов может быть описана выражением:
0, при k t t k 1 |
T; |
(1.8) |
U A,T , ,t |
|
|
A, при k T t k T , |
|
|
где A – амплитуда импульсов; |
|
|
T – период следования импульсов; |
|
|
τ – длительность импульсов; |
|
|
t – текущее время или текущая пространственная координата; k 0,1,2,...
График детерминированной последовательности импульсов представлен на рис.1.2
U
τ
A
t
0 |
T |
2T |
3T |
|
|
Рис.1.2 |
|
Любой из параметров последовательности импульсов (A, T, τ) может быть использован в качестве информационного.
Если в качестве информационного параметра используют амплитуду А, то такая модуляция называется амплитудно-импульсной, при этом модулированный сигнал можно описать выражением:
|
|
13 |
|
A x t , при k T t k T ; |
(1.9) |
||
SАИ t |
0, |
при k T t k 1 T , |
|
|
|
||
где x t – модулирующий сигнал, соответствующий передаваемому сообщению.
Если же в качестве информационного параметра выбран период следования импульсов Т, то такой вид импульсной модуляции называют частотно-импульсной. При этом виде модуляции период следования импульсов (Т) является функцией
модулирующего сигнала |
x t , |
и модулированный сигнал может быть |
представлен |
|
выражением: |
|
|
|
|
S |
t A, при k T x t t k T x t |
; |
(1.10) |
|
ЧИ |
|
0, при k T x t t k 1 T x t . |
|
|
|
|
|
||
В качестве информационного параметра может быть |
выбрана |
длительность |
||
импульса ( ). В этом случае говорят о широтно-импульсной модуляции и сигнал, полученный в результате этого вида модуляции может быть представлен в виде:
A, |
при k T t k T x t ; |
(1.11) |
|
SШИ t |
0, |
при k T x t t k 1 T. |
|
|
|
||
Могут использоваться и комбинированные виды импульсной модуляции, при которых в качестве информационных параметров используют сразу два параметра последовательности импульсов, например, амплитуда и частота. В этом случае один сигнал-переносчик может служить для передачи сразу двух сообщений, каждое из которых будет управлять своим информационным параметром.
§1.4. Цифровая модуляция
Цифровая модуляция широко используется при цифровой обработке сигналов с помощью ЭЦВМ.
Сущность цифровой модуляции заключается в том, что сигнал, соответствующий передаваемому сообщению, подвергается дискретной модуляции по амплитуде и (или) текущему параметру, а полученные отсчеты представляются в виде цифр в какой-либо системе счисления. Цифровые виды модуляции относятся к классам G1-G4 классификации различных видов модуляции (Таблица 1.1).
Цифровые виды модуляции находят широкое применение при передаче и обработке сигналов и сообщений, так как обладают важными достоинствами:
14
слабое влияние неидеальности и нестабильности аппаратуры на качество передачи информации;
высокая помехоустойчивость;
универсальная форма представления сигналов;
простое согласование с ЦВМ;
возможность унификации и стандартизации элементов и устройств обработки и передачи сигналов.
Из недостатков цифровых видов модуляции следует отметить значительное расширение полосы частот, которое требуется для их передачи, и необходимость точной синхронизации сигналов.
Из различного вид цифровых модуляций при обработке сигналов с помощью ЦВМ наиболее широко применяется так называемое аналого-цифровое преобразование, включающее в себя следующие необходимые преобразования непрерывного сигнала:
дискредитацию (квантование) по уровню;
дискредитацию (квантование) по времени или по пространственной координате;
представление полученных отсчетов в какой-либо системе счисления и кодирование.
Очередность выполнения операций дискредитации по уровню и дискредитации по времени не существенна. Однако обе эти операции имеют свои специфические особенности, которые влияют на точность и достоверность аналого-цифрового преобразования, что требует их детального рассмотрения.
§1.5. Дискретизация по уровню (квантование по уровню)
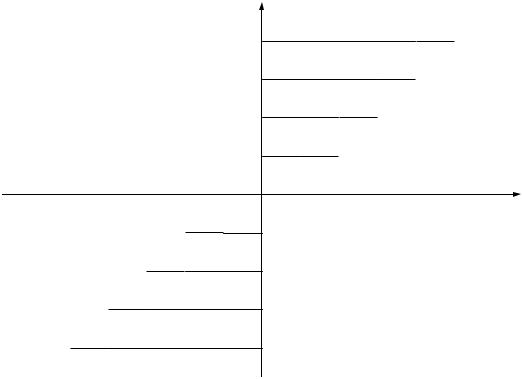
Сущность дискретизации (квантовании) по уровню, как нелинейного преобразования, заключается в том, что все отсчеты непрерывного сигнала x t , попадающие в интервал дискретизации xk , представляются одним значением xk , которое называется квантованным. Таким образом, происходит преобразование непрерывного сигнала в дискретный. Процесс дискретизации по уровню определен, если задана характеристика дискретизации или квантования (рис.1.3), которая связывает интервалы дискретизации и квантованные значения, то есть каждому
15
интервалу дискретизации ставится в соответствие квантованное значение xk . Часто интервалы квантования выбирают одинаковыми и тогда говорят, что квантование происходит с постоянным шагом.
|
|
|
|
|
|
|
|
xk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
x3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-x |
5 -x |
4 -x |
3 -x |
2 -x1 |
|
|
x |
1 |
x |
2 |
x |
3 |
x |
4 |
x |
|
5 |
x(t) |
|
|
|
|
|
|
|
|
|
-x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
-x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
-x3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
-x4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 1.3
Характерной особенностью операции квантования по уровню является то, что квантованный сигнал отличается от оригинала даже при полном отсутствии шумов. Действительно, если на вход устройства квантования подается сигнал x t , а на выходе получаем квантованный сигнал xk t , то они будут отличаться друг от друга на величину (рис.1.4а).
t x t xk t .

xk
x5
x4
x3
x2
x1
ε(t)
x
2
α
x
2
16
x(t)

 xk(t)
xk(t)
а) |
t |
t
б)
Рис. 1.4
Величину t называют шумом квантования, так как искажения, вызываемые квантованием по уровню равносильны искажениям, вызванные источником шума, то есть искажения рассматриваются как шум, вводимый в систему при квантовании. Частота этого шума зависит от частоты квантуемого сигнала и превышает его.
Максимальная амплитуда шума равна шагу квантования, и поэтому для уменьшения шума необходимо уменьшать шаг квантования.
Для определения среднеквадратического значения ошибки квантования по уровню предположим, что непрерывный сигнал x t имеет равномерную плотность распределения, интервалы дискретизации xk одинаковы по величине и в качестве квантованных значений xk выбираются середины соответствующих интервалов дискретизации. В этом случае, при достаточно большом числе интервалов дискретизации, ошибка квантования t может быть приближенно представлена в виде графика, состоящего из отрезков прямых линий с различными наклонами

17
(рис.1.4б). Эти отрезки ограничены снизу и сверху половиной шага квантования, исключения составляют шаги, в которых сигнал либо минимален, либо максимален.
Если шаги квантования малы, то среднеквадратическая ошибка приближенно определяется среднеквадратическим значением типичного линейного отрезка.
Для интервалов времени, заключенных между |
|
x |
|
|
и |
x |
, то есть |
|||||||||||||||||||||
|
2m |
2m |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
x |
t |
|
x |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.12) |
||
|
|
|
|
|
2m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
2m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
можно записать уравнение, определяющее типичный линейный отрезок ошибки |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
t m t , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.13) |
|||||
где m tg - наклон отрезка; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
t - время отсчитывается от точки пересечения отрезком оси t. |
|
|||||||||||||||||||||||||||
Тогда среднеквадратическая ошибка квантования |
|
2 может быть определена |
||||||||||||||||||||||||||
следующим выражением: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
x 2m |
|
|
|
m3 |
|
t3 |
|
|
x |
|
|
x2 |
|
|
|||||||||
|
|
2 |
|
2 |
|
|
|
|
|
2m |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
m t dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
(1.14) |
|||||||||
|
x |
x |
3 |
|
|
|
12 |
|||||||||||||||||||||
|
|
|
|
|
x |
2m |
|
|
|
|
|
|
|
x |
|
|
|
|||||||||||
|
|
|
|
m |
|
|
|
|
|
|
|
|
2m |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, процесс квантования по уровню вносит в сигнал шум квантования, причем среднеквадратическая ошибка квантования по уровню 2 зависит от шага квантования и определяется равенством:
|
|
2 |
|
x2 |
|
|
|
|
|
. |
(1.15) |
||||
|
12 |
||||||
|
|
|
|
|
|
||
Следует отметить, что полученное |
выражение справедливо только в |
случае |
|||||
выполнения ограничений, указанных выше и которые описывают наиболее типичные условия при выполнении операции дискретизации по уровню.
В случае если плотность распределения сигнала x t не постоянна или интервалы дискретизации ( xk ) имеют различную величину или квантованное значение xk не равно середине интервала дискретизации xk , выражение для определения среднеквадратической ошибки может иметь иной вид.
Следует также отметить, что, как известно из теории информации, среднее количество информации (I), содержащееся в сообщении x, которую можно выделить из
смеси полезного сигнала и шума определяется выражением: |
|
I H y H n , |
(1.16) |

18
где H y – энтропия принятого сообщения; H n – энтропия шума.
Таким образом, квантование по уровню снижает среднее количество информации, содержащееся в сообщении.
§1.6. Дискредитация (квантование) по времени или по текущей координате
Для удобства изложения будем считать сигнал x t динамическим сигналом (t – текущее время), хотя все ниже приведенные рассуждения будут справедливы и для статических сигналов, для которых t – текущая пространственная координата.
Непрерывный сигнал x t может быть преобразован в непрерывный сигнал дискретного аргумента путем взятия отсчетов мгновенных значений (выборок) через интервалы времени t1 , t2 , t3 и т.д. (рис.1.5).
x(t) xk(t)
t0 t1 t1 t2 |
t2 |
t3 |
t4 |
t5 |
t6 |
t |
|
|
|
Рис. 1.5 |
|
|
|
Такое преобразование называют дискретизацией или квантованием по времени. Полученный в результате сигнал xk t называют квантованным по времени, и он представляет собой последовательность отсчетов мгновенных значений, взятых в дискретные моменты времени.
Интервалы дискретизации t1 , t2 , t3 и т.д. могут быть различны, хотя с практической точки зрения их часто берут одинаковыми
19 |
|
|
ti t , |
i 1,2,..., k . |
(1.17) |
В этом случае говорят, что дискретизация по времени производится с постоянным шагом.
Для аналитического описания процесса дискретизации по времени используют
импульсную функцию дискретизации T t , которая |
представляет собой |
периодическую последовательность -функций, то есть: |
|
|
|
T t t k t , |
(1.18) |
k 0 |
|
где t – дельта-функция; |
|
k - номер дельта-функции в последовательности;t - период следования дельта-функции;
Следует отметить, что дельта-функция t определяется следующим образом:
, при t 0; |
|
t |
0, при t 0, |
|
|
причем площадь, ограниченная -функцией равна 1, то есть
t dt 1 .
(1.19)
(1.20)
Процесс дискретизации по времени непрерывного сигнала x t может рассматриваться как умножение этого сигнала на импульсную функцию дискретизацииT t , то есть
|
|
xk t x t T t x t t k t . |
(1.21) |
k 0 |
|
Учитывая то, что функция t k t отлична от 0 только в моменты времени |
|
t k t , выражение (1.21) может быть записано в следующем виде |
|
|
|
xk t x k t t k t . |
(1.22) |
k 0 |
|
Отсюда следует, что умножение непрерывного сигнала x t |
на -функцию |
приводит к тому, что площадь, ограниченная -функцией становиться численно равной значению сигнала в момент времени t k t . Эту площадь обычно называют весом - функции и он равен мгновенному отсчету сигнала x t в момент времени t k t .
20
Таким образом, процесс дискретизации по времени соответствует образованию периодической последовательности -функций, вес каждой составляющей которой численно равен мгновенным значениям сигнала в момент взятия отсчета.
При практическом выполнении дискретизации по времени, естественно, возникает вопрос:
каков должен быть оптимальный интервал дискретизации t , чтобы можно было восстановить по квантованному сигналу xk t исходный непрерывный сигнал x t с достаточной точностью. Действительно, если интервал дискретизации t будет достаточно велик, это приведет к большим погрешностям восстанавливаемого непрерывного сигнала в промежутках между отсчетами, а если интервал дискретизации будет мал, то это значительно увеличит число отсчетов и, следовательно, увеличиться объем обрабатываемых данных.
Для реальных сигналов, то есть таких сигналов, у которых длительность (Т) конечна, максималльная частота в спектре ( FM ) и мощность сигнала ограничены из-за инерционности и ограниченности по мощности реальных источников сообщений, оптимальный интервал дискретизации может быть определен на основе теоремы Котельникова (теорема отсчетов), доказательство которой приведено в Гл. . Из этой теоремы следует, что непрерывный сигнал длительности Т и не содержащий частот в спектре выше FM полностью определяется последовательностью своих раноотстоящих
мгновенных значений, взятых с интервалом t , |
общее число которых не превышает N, |
|||||||
причем |
|
|
|
|
|
|
|
|
t |
|
1 |
; |
|
|
|
(1.23) |
|
2F |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
N 2T FM 1. |
|
|
|
|
||||
Исходный непрерывный сигнал |
|
x t может |
быть точно |
восстановлен по |
||||
квантованному сигналу xk t в соответствии с уравнением |
|
|
||||||
x t x k t |
|
sin 2 FM t |
k t |
, |
(1.24) |
|||
|
2 FM t k t |
|
||||||
k |
|
|
|
|
||||
причем предварительно квантованный сигнал |
xk t |
должен быть |
пропущен через |
|||||
фильтр с верхней границей пропускания равной FM .
Дискретизация по времени является неотъемлемой и ответственной частью аналого-цифрового преобразования, нарушения при проведении которого ёведет к