В которых:
f – фокусное расстояние съемочной камеры;
xo, yo – координаты главной точки в системе координат снимка;
x, y – координаты изображения точки тест-объекта в системе координат снимка;
X,Y,Z - координаты соответствующей точки тест-объекта в системе координат объекта;
XS,YS,ZS – координаты точки фотографирования (центра проекции);
aij – элементы матрицы преобразования координат (направляющие косинусы), являющиеся функциями угловых элементов внешнего ориентирования съемочной камеры ,,;
dx,dy – поправки в измеренные на снимке координаты x, y изображения точки тест-объекта за дисторсию объектива, определяемые уравнениями (7.1).
Полученную по всем измеренным на снимке изображениям точек тест-объекта систему уравнений решают методом приближений по способу наименьших квадратов. В результате решения системы уравнений определяют элементы внешнего ориентирования снимка XS,YS,ZS, ,, и параметры внутреннего ориентирования снимка f, xo, yo, k1, k2, k3, p1, p2 с оценкой точности их определения.
При решении предварительно исходные уравнения приводят к линейному виду, раскладывая их в ряд Тейлора с сохранением членов только первого порядка малости, и переходят к уравнениям поправок вида:
![]() (7.3)
(7.3)
где B – матрица коэффициентов уравнений поправок (частные производные от исходных уравнений по неизвестным) размерностью m x n (m – число уравнений, n – число неизвестных);
δ – матрица размерностью 1 x n неизвестных поправок к элементам внешнего ориентирования снимка и параметрам внутреннего ориентирования;
L –матрица размерностью 1 x m свободных членов;
V - матрица размерностью 1 x m поправок в измеренные координаты точек снимка. В нашем случае m = 2k, где k – число точек тест-объекта, измеренных на снимке, а n = 14.
 ;
; ;
; ;
;
Значения коэффициентов уравнений поправок (7.3) ai, bi вычисляются по известным значениям координат точек снимка х,у и тест-объекта X, Y, Z и приближенным значениям элементов внешнего ориентирования снимка XS, YS, ZS, , , и параметров внутреннего ориентирования снимка f, xo, yo, k1, k2, k3, p1, p2.
Свободные члены ℓх, ℓу вычисляются по формулам (7.2) таким же образом.
Для решения системы линейных уравнений (7.3) по способу наименьших квадратов переходят к нормальным уравнениям:
![]()
или
![]() , (7.4)
, (7.4)
где N - матрица коэффициентов нормальных уравнений размерностью n x n; LN – матрица размерностью 1 x n свободных членов нормальных уравнений; P – диагональная матрица весов измерений:
 .
.
Pi = 1/ mxi2
mxi– средняя квадратическая ошибка i-го измерения.
В результате решения уравнений (7.4) получим:
![]()
или
![]() . (7.5)
. (7.5)
Здесь Q - обратная матрица коэффициентов нормальных уравнений.
Таким образом, получают поправки ко всем приближенным значениям неизвестных элементов внешнего ориентирования снимка и параметрам внутреннего ориентирования камеры и вычисляют уточненные их значения:
По уточненным значениям неизвестных снова составляют уравнения поправок (7.3) и решают полученную систему уравнений по способу наименьших квадратов. Так продолжают до тех пор, пока поправки к неизвестным станут пренебрегаемо малыми величинами. В результате получают уравненные значения элементов внешнего ориентирования снимка и параметры внутреннего ориентирования камеры под условием VTPV=min. В последнем приближении выполняют оценку точности определения неизвестных, т.е. вычисляют средние квадратические ошибки неизвестных:
![]() (7.6)
(7.6)
![]() (7.7)
(7.7)
μ – средняя квадратическая ошибка единицы веса, Qjj – диагональные элементы обратной матрицы; m-n - число избыточных измерений.
С целью повышения надежности и точности определения параметров внутреннего ориентирования калибруемых камер, целесообразно производить съемку тест-объекта многократно с поворотом камеры вокруг оптической оси объектива на 180о и определять искомые параметры в результате совместной обработки измерений выполненных по всем полученным снимкам.
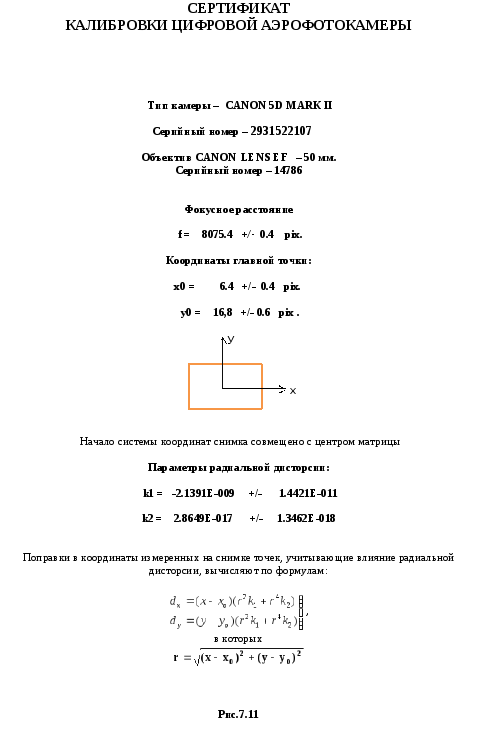
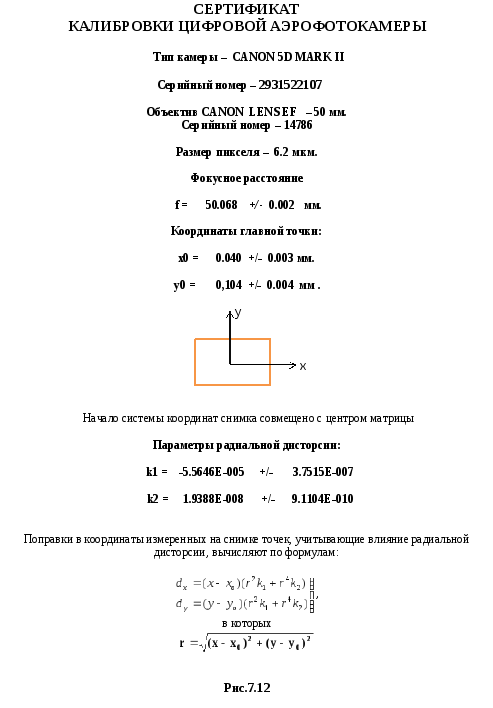
Критерием оценки точности проведенной фотограмметрической калибровки цифровой камеры и, как следствие, критерием пригодности камеры для выполнения фотограмметрических определений являются значения остаточных погрешностей координат измеренных на снимке точек. Их значения в зависимости от типа калибруемой съемочной камеры должны лежать в пределах от 0.15 до 0.5 пикселя.
На рис. 7.11 и 7.12 представлены образцы сертификатов калибровки цифровой фотокамеры. В первом сертификате за единицу измерений был принят пиксель, а во втором миллиметр.