

8.4 Калибровка по плоскому тест-объекту
8.4. Самокалибровка
Самокалибровка это метод калибровки камер, позволяющий определить параметры камеры в процессе фототриангуляции, выполняемой по реальным снимкам объекта.
В главе 5 мы рассмотрели фототриангуляцию по способу связок, которая основана на уравнениях коллинеарности. Фототриангуляция с самокалибровкой выполняется таким же образом, единственное отличие заключается в том, что к уравнениям коллинеарности добавляются параметры dx и dy, характеризующие систематические ошибки снимков, т.е. (8.3) или (8.4).
Некоторые авторы вместо формул дисторсии объектива (8.1), (8.2) для dx и dy используют полиномы различных степеней, считая, что полиномы описывают суммарную систематическую ошибку снимков, складывающуюся из дисторсии объектива, рефракции, деформации фотоматериала и т.д.
До сих пор нет четкого мнения какой метод лучше, так как в каждом конкретном случае фототриангуляции наилучший вариант будет свой. Поэтому многие программы фототриангуляции с самокалибровкой имеют возможность выбирать дополнительные параметры в автоматическом или интерактивном режиме, на основе анализа корреляции между параметрами и элементами внутреннего и внешнего ориентирования снимков.
В любом случае при выполнении фототриангуляции с самокалибровкой рекомендуется на каждом снимке измерять не менее 30 точек распределенных по всей площади снимка.
Трехмерный лазерный сканер
Сканер предназначен для съемки различных объектов (зданий, сооружений, местности и т.д.). Результатом является совокупность точек объекта, для каждой из которых определены пространственные координаты X,Y,Z соответствующая плотность изображения d.
Сканер представляет собой устройство, объединяющее в себе теодолит, лазерный дальномер и цифровую камеру. Таким образом, для любой точки объекта, регистрируются горизонтальный и вертикальный углы с помощью теодолита, расстояние D с помощью лазерного дальномера и плотность изображения d с помощью цифровой камеры (сенсора) (рис.1).
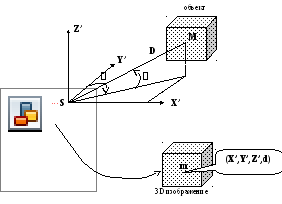
Рис.1
Задавая диапазон (min,min и max,max) и шаг (,) изменения горизонтальных и вертикальных углов сканер автоматически с помощью моторов последовательно устанавливает луч лазера и регистрирует параметры , , D и d для каждой точки объекта в заданных пределах. Точность установки , с помощью моторов ниже точности измерения углов , , поэтому для каждой точки сканирования регистрируются значения , .
Соответствующие координаты точек объекта вычисляются по известным формулам:
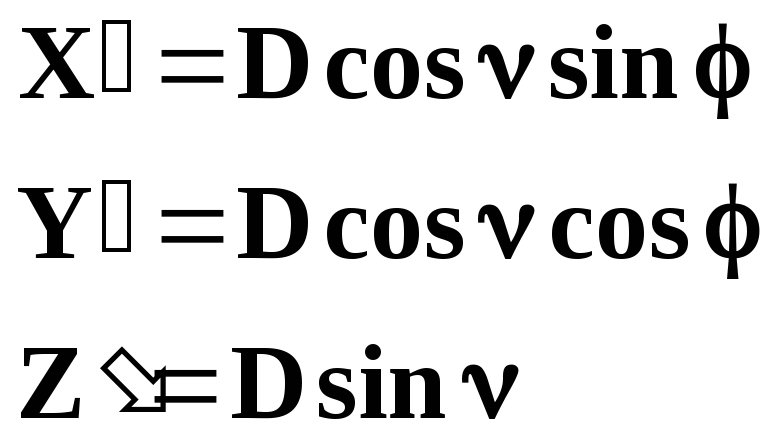 (1)
(1)
Координаты точек объекта X’,Y’,Z’ получаются в пространственной системе координат сканера SX’Y’Z’ (рис.1). Эта система координат связана с системой отсчетов горизонтальных и вертикальных углов в сканере и в общем случае произвольно ориентирована в пространстве.
Для получения плотности изображения d для каждой точки объекта могут применяться два подхода. В первом случае используется камера, состоящая из одноэлементного приемника излучения (сенсора), который фиксирует яркость объекта в виде плотности изображения в точке визирования лазерного дальномера. Лазер работает в зоне невидимого спектра, поэтому получаются реальные плотности. Во втором случае применяется цифровая камера, основанная на матрице ПЗС. С помощью этой камеры сначала получают серию изображений, покрывающих весь объект в пределах предполагаемого сканирования. Затем объект сканируется, а соответствующие плотности берутся с этих снимков. Такой подход предпочтительнее, т.к позволяет в последующей обработке оперировать не только с облаком точек лазерного сканирования, но и с цифровыми изображениями объекта, что существенно повышает информативность полученной информации об объекте.
Рассмотрим более подробно второй вариант получения плотностей изображения для каждой точки сканирования.
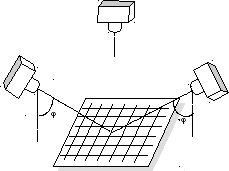
Итак, сначала производится съемка всего объекта путем поворотов и наклонов камеры (или соответствующего зеркала) с помощью моторов последовательно на углы равные углам поля зрения камеры (рис.2). Здесь стрелками показаны возможные повороты и наклоны камеры в системе координат сканера.

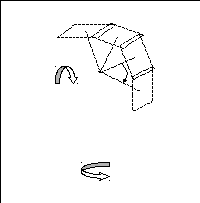
Рис.2
На рис. 3 показаны система координат сканера SX’Y’Z’, в которой производится определение координат точек объекта М, и система координат камеры Sixyz, которая может изменять свое положение и ориентацию относительно системы координат сканера во время съемки. Наша задача найти координаты вектора r в системе координат камеры с тем, чтобы по ним взять со снимка соответствующую плотность d изображения точки M.
Из этого рисунка следует, что
R = RM - RS (2)
или
NAi r = RM - RSi (3)
Где N – скаляр; Аi – матрица поворота системы координат камеры в момент съемки i относительно система координат сканера; r – вектор, определяющий положение точки m в системе координат камеры; RM - вектор, определяющий положение точки M в системе координат сканера; RSi – вектор, определяющий положение начала системы координат камеры относительно ситемы координат сканера в момент съемки i.
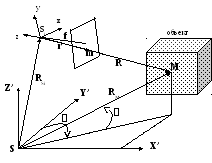
Рис.3
Из (3) имеем:
![]() (4)
(4)
или в координатной форме:
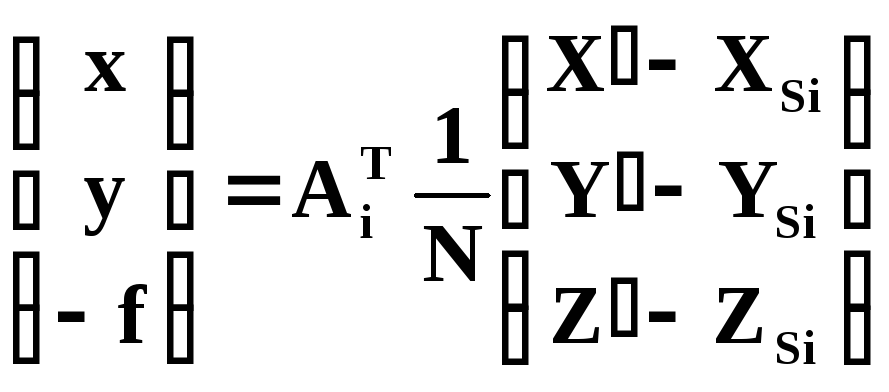 (5)
(5)
Если выразить из третьего уравнения выражения (5) значение 1/N и подставить в первые два, то получим известные в фотограмметрии уравнения коллинеарности:
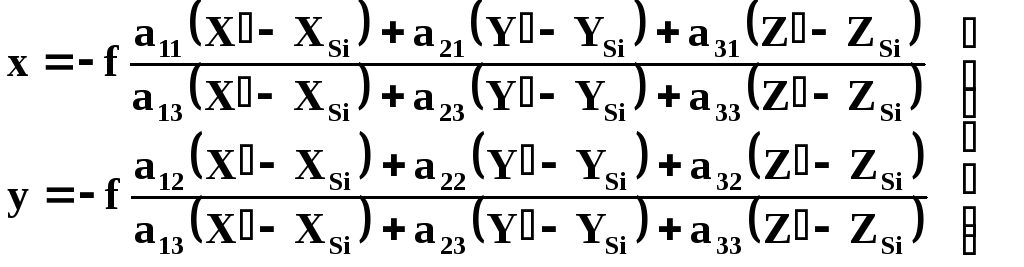 (6)
(6)
В этих уравнениях известны все величины, необходимые для вычисления координат x,y. Так, координаты точки объекта X’Y’Z’ вычисляются по (1), а элементы внешнего ориентирования снимка следующим образом. Как следует из рис.4, вектор RSi, определяющий положение центра проекции камеры Si в момент фотографирования i в системе координат сканера SX’Y’Z’ равен:
![]() (7)
(7)
где RSo – вектор, определяющий положение точки вращения камеры в системе координат сканера; ci – вектор, задающий положение центра проекции камеры Si в системе координат SoX’Y’Z’, параллельной системе координат сканера SX’Y’Z’.
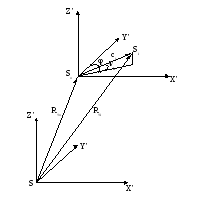
Рис.4
В координатной форме уравнение (7) имеет вид:
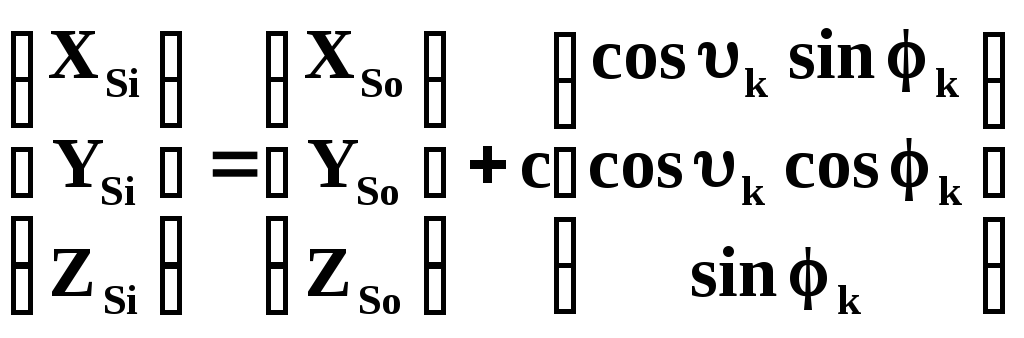 (8)
(8)
где, с – модуль вектора ci (величина постоянная для данного сканера и камеры),
k, k – горизонтальный и вертикальный углы наклона камеры (задаются и измеряются сканером - величины кратные соответствующим углам поля зрения камеры).
Величины XSo,YSo,ZSo,c являются постоянными для данного сканера и определяются в результате его калибровки.
Направляющие косинусы aij в (6) вычисляются по известным формулам, подставляя в них вместо α,ω соответствующие значения k, k. При этом κ = 0.
В результате для каждой точки объекта с координатами X’Y’Z’ получается плотность изображения d, взятая со снимка по координатам xy, вычисленным по (6).
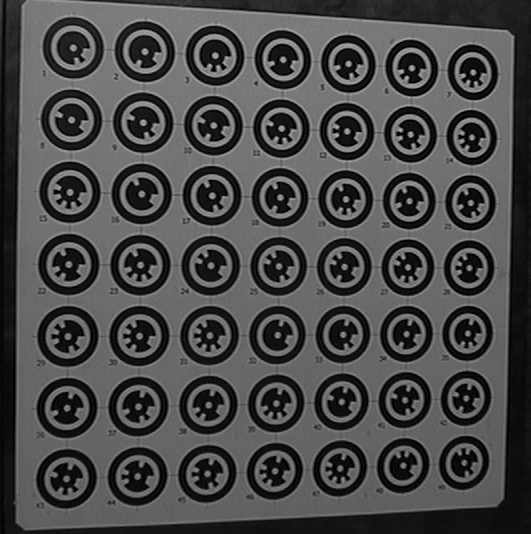
Во время съемки сканер (система координат сканера) не ориентируется в пространстве и не нивелируется. Для получения соответствующих координат точек объекта в системе координат объекта OXYZ, в сканере предусмотрено автоматическое распознавание специальных маркированных точек (рис.5), известных в этой системе координат.
Рис.5
Преобразование координат осуществляется по известным формулам:
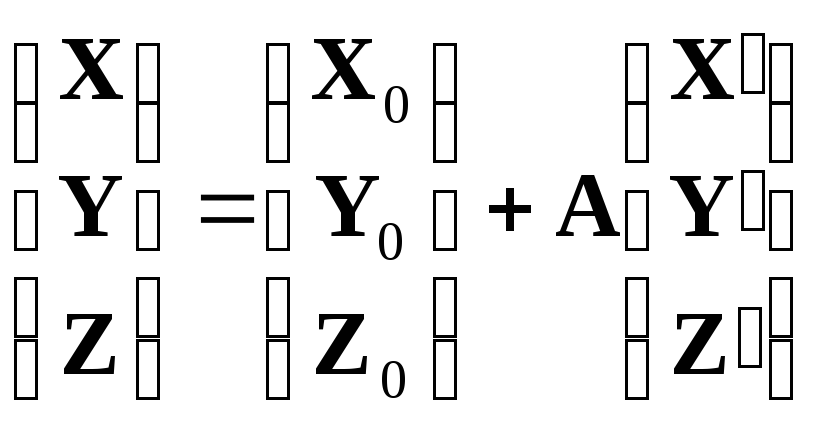 (9)
(9)
где X,Y,Z – координаты точки объекта в системе координат объекта OXYZ; X’Y’Z’ - координаты точки объекта в системе координат сканера SX’Y’Z’, вычисляемые по (1); X0,Y0,Z0 – координаты начала системы координат сканера SX'Y'Z' относительно системы координат объекта; A – матрица поворота, зависящая от трех углов .
Неизвестные элементы внешнего ориентирования сканера X0,Y0,Z0,,, можно определить по опорным точкам. Из (9) видно, что минимальное число опорных точек равно 2, однако в этом случае может возникнуть неопределенность в определении угловых элементов. Поэтому минимальным числом опорных точек следует считать 3, не лежащих на одной прямой. Естественно, лучше иметь больше опорных точек, разнесенных по площади.
Преобразование (9) делается для всех съемок одного и того же объекта, выполненных с различных точек стояния Si (рис.6). В результате имеем X,Y,Z,d для всей совокупности точек объекта в единой системе координат OXYZ. Затем эта информация может быть использована для последующих вычислений (объемы, площади, модели объекта в виде триангуляции Делоне и т.д.). Кроме того, ее можно визуализировать в трехмерном (3D) пространстве с наложением реального изображения объекта под различными углами зрения или в виде обычного двухмерного (2D) цветного (RGB) изображения (рис.7,8).
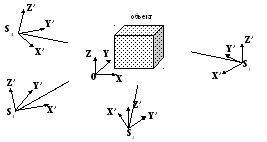
Рис.6
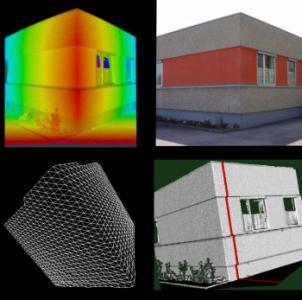
Рис.7

Рис.8
На рис. 9 показана, в качестве примера, принципиальная схема и общий вид трехмерного лазерного сканера LMS-Z420 фирмы RIEGL.
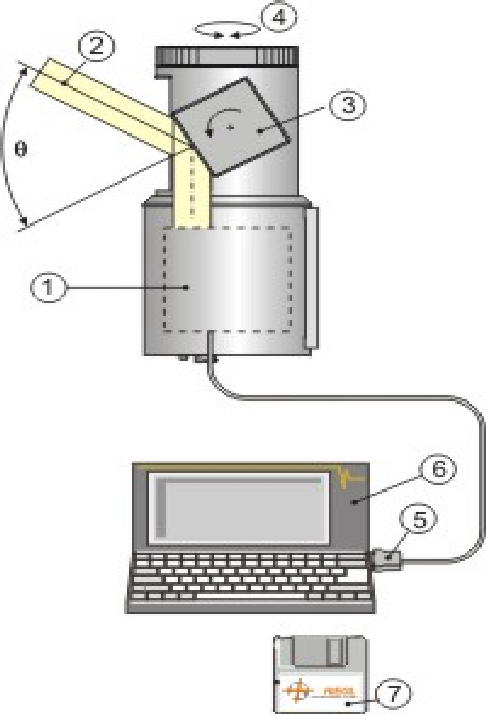

Рис.9
Здесь 1 - Лазерный дальномер.
2 – Лазерный луч.
3 – Вращающаяся зеркальная призма.
4 – Вращающаяся оптическая головная часть.
5 – Кабель передачи данных на LPT порт PC.
6 – Персональный компьютер (PC)
7 – Программное обеспечение.
– Вертикальный угол поля зрения.
Данный сканер позволяет выполнять съемку с расстояниями до объекта от 2м до 1000м со следующими углами поля зрения: вертикальный – 80o, горизонтальный – 360o. При этом величина углового шага сканирования и может достигать 0,01о, с точностью измерения углов 0,002о. Длины линий измеряются с точностью 10-20мм (в зависимости от расстояния). Скорость выполнения измерений – до 9000 точек в секунду.