

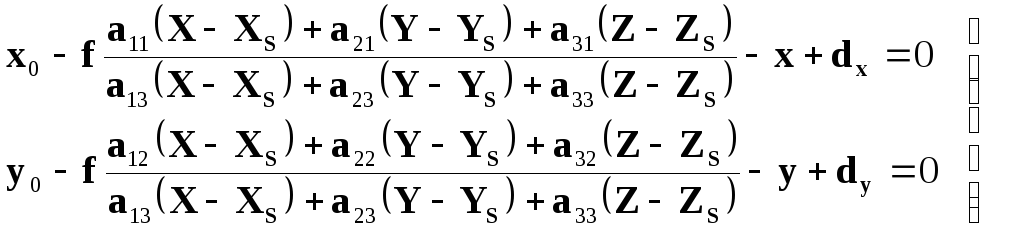
После съемки этого объекта исследуемой камерой решается обратная засечка, на основе расширенных уравнений коллинеарности:
 (8.3)
(8.3)
где dx,dy – поправки в координаты точек снимка за дисторсию объектива, вычисляемые по (8.1) или (8.2). В качестве неизвестных в уравнениях (8.3) выступают элементы внутреннего f,xo,yo, и внешнего ориентирования XS,YS,ZS, ,, и коэффициенты дисторсии k1,k2,k3, p1,p2. Для их определения составляют эти уравнения по измеренным координатам точек снимка x,y и координатам X,Y,Z соответствующих точек тест-объекта.Задача решается по способу наименьших квадратов, методом последовательных приближений.
Для камер, в которых происходит преобразование видеосигнала в цифровую форму, рекомендуется добавить к уравнениям (8.3) коэффициенты аффинного преобразования а1 и а2, то есть:
 (8.4)
(8.4)
Чтобы решить проблему калибровки камеры корректно и надежно на основе уравнений (8.3) и (8.4) большое значение имеет тест-объект (размеры, количество точек и точность их координат) и метод его съемки. Съемку следует выполнять таким образом, чтобы точки объекта покрывали всю площадь снимка (рис. 8.5)
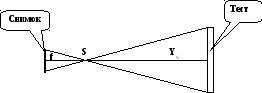
Рис.8.5
Размеры тест-объекта зависят от типа камеры, подлежащей калибровке, т.е. зависят от оптимальных отстоянийYS съемки, для которых предназначена данная камера. Если приблизительно известно это отстояние и фокусное расстояние камеры, то можно вычислить размеры тест-объекта из рис. 8.5. В качестве теста можно использовать фасад здания на котором маркируются с большой густатой опорные точки. Что касается распределения точек, то их следует располагать равномерно по всей площади в плоскости, параллельной плоскости снимка (так, чтобы покрыть весь снимок точками для надежного определения коэффициентов дисторсии объектива) и в перпендикулярном направлении (по глубине) для определения фокусного рассояния камеры.
На рис. 8.6 показаны примеры тест-объектов.


Рис.8.6
Если опорные точки тест-объекта будут находиться в одной плоскости, то в следствии корреляции фокусного расстояния f с отстоянием YS при решении обратной засечки приводит к неопределенности решения. Это обстоятельство поясняет рис. 8.7.
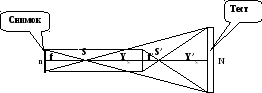
Рис.8.7
Предположем, что плоский тест-объект был снят камерой с фокусным расстоянием f из точки S, установленной от объекта на отстоянии YS =SN. В результате решения обратной засечки при совместном нахождении f и Ys возникает многозначность решения, одним из которых является f’ и Y’S (рис.8.7) при котором все проектирующие лучи пересекаются в точке S’. В тоже время для пространственного объекта существует только одно решение в точке S, так как в точке S’ не пересекаются все лучи (рис. 8.8).
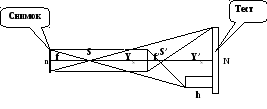
Рис.8.8
Очевидно, что чем больше третье измерение объекта (h), тем более надежно решение. Из исследований известно, что отношение h/YS не должно быть меньше чем 1/5.
Точность координат точек тест-объекта с которой их следует определять, можно подсчитать по простой формуле:
![]()
где dx – точность с которой необходимо определить параметры калибровки. Предположим, что dx =0.001mm, фокусное расстояние камеры примерно равно f=100mm, съемка будет выполняться с расстояния YS=30m, тогда dX = 0.1mm