

2014-15_уч / Методичка1 ТММ редактир
..pdf50
3.5.Контрольные вопросы
1.Что называется механизмом?
2.Что называется машиной?
3.По каким признакам классифицируются механизмы?
4.какие звенья называются начальными, ведущими, ведовыми, входными, рабочими, пассивными, выходными?
5.Какие звенья получили названия: кривошипа, шатуна, кулисы, камня, коромысла, ползуна?
6.Как изображаются на кинематических схемах звенья механизма?
7.Что называется кинематической парой?
8.По каким признакам классифицируются кинематические пары?
9.Какая кинематическая пара называется высшей?
10.Какая кинематическая пара называется низшей?
11.Какими преимуществами и недостатками обладают высшие и низшие кинематические пары?
12.Каким образом кинематические пары классифицируются по числу условий связи?
13.Что называется масштабным коэффициентом?
14.Что называется планом механизма?
15.Что называется степенью подвижностью механизма?
16.Что показывает формула Чебышева П.Л.?
17.Сколько степеней подвижности у механизма первого класса?
18.Что называется кинематической цепью?
19.Как классифицируются кинематические цепи?
20.Какая кинематическая цепь называется замкнутой?
21.Каким образом кинематическая цепь преобразуется в механизм?
22.Что называется структурной группой?
23.Как определяется класс и порядок структурной группы по Артоболевскому И.И.?
24.В чем состоит метод планов скоростей и планов ускорений?
25.Как направлено нормальное (касательное) ускорение точки при вращательном движении звена?
26.Как определить величину и направление поворотного (Кориолисова) ускорения?
27.Как построить кинематические диаграммы перемещения, скорости и ускорения заданного звена механизма?
28.Как определяются масштабы графиков при графическом дифференцировании и интегрировании?
29.Почему структурная группа статически определима?
30.В какой последовательности проводится определение давлений в кинематических парах?
31.Что понимается под уравновешивающей силой и под уравновешивающим моментом?
32.Как определить уравновешивающий момент (силу)?

51
4. КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ И ГЕОМЕТРИЧЕСКИЙ СИНТЕЗ ПЛАНЕТАРНЫХ ЗУБЧАТЫХ МЕХАНИЗМОВ
4.1. Простейшие типовые схемы механизмов
Планетарными называются механизмы для преобразования вращательного движения, содержащие колеса с подвижными осями и имеющие степень подвижности W 1. Основными звеньями такого механизма являются центральные колеса с неподвижными осями, сателлиты – колеса с подвижными осями, установленными в звено, называемое водилом Н . На рис. 4.1 показаны простейшие типовые кинематические схемы планетарных механизмов.
Одной из особенностей планетарных механизмов является возможность получения больших значений передаточных отношений, а также многопоточность передачи энергии при многосателлитной схеме, когда имеется несколько зон зацепления сателлитов с центральными колесами, за счет чего обеспечивается снижение габаритов и массы редуктора по сравнению с рядовыми механизмами.
Обычно число сателлитов назначают от 2 до 6, но при высокой точности изготовления и сборки число сателлитов можно увеличить до 10.
Другой особенностью планетарных механизмов является легкая изменяемость их кинематической схемы. При выключении тормозов Т механизм имеет дифференциальную схему (рис. 4.1), а при торможении одного из звеньев можно получить либо рядовой механизм с неподвижными осями (тормоз – Т Н ), либо
планетарный механизм (тормоз – Т i ). Передаточное отношение планетарного ме-
ханизма обозначается с верхним индексом в скобках, который соответствует остановленному (неподвижному) звену, а два нижних индекса соответствуют входному и выходному звеньям, например, для схемы «а» –
(3)
i1(h3) 1 Н(3) ,
где – угловая скорость соответствующего звена.
На схемах (рис. 4.1) указаны наиболее рациональные диапазоны передаточных отношений, при которых обеспечивается достаточно высокий коэффициент полезного действия (КПД) за исключением схемы «г» с двумя внешними зацеплениями, имеющий низкий КПД и применяемый сравнительно редко.
Так как любой планетарный редуктор, имеющий неподвижное колесо, можно превратить в дифференциальный, т. е. механизм со степенью подвижности W 2, если освободить неподвижное (опорное) колесо и сообщить ему вращение, то для исследования и проектирования эпициклических механизмов используется единый подход, независимо от их степени подвижности, при этом исследуемый дифференциальный редуктор может быть условно превращен предварительно в приведенный планетарный путем обращения движения (см. п. 4.2.).

а) |
б) |
в) |
г) |
52
Рис. 4.1. Типовые схемы планетарных механизмов
53
4.2. Методы кинематического исследования
Кинематическое исследование планетарных механизмов (определение скоростей вращения) может быть произведено аналитическим и графическим методами.
Аналитический метод исследования (метод приведенного механизма, основанный на обращении движения) предложен Виллисом и заключается в том, что всему механизму сообщают условное вращение с угловой скоростью, обратной угловой скорости водила ( Н ). Водило в обращенном движении становится не-
подвижным, а обращенный планетарный механизм превращается в рядовой механизм с условно неподвижными осями, передаточное отношение которого можно определить по формуле
i( Н ) 1 |
Н , |
(4.1) |
|
13 |
3 |
Н |
|
|
|
||
где i13( Н ) − передаточное отношение рядового механизма от 1-го колеса к 3-му при неподвижном водиле; 1 , 3 , н − угловые скорости 1-го, 3-го колес и водила.
С другой стороны, передаточное отношение i13( Н ) можно выразить через числа зубьев колес. Например, для механизма, представленного на рис. 4.1, а.
( Н ) |
|
|
|
|
|
|
|
|
|
z3 |
|
|
|
z2 |
|
z3 |
|
|
|||||
i13 |
|
|
|
|
|
|
|
|
|
|
. |
|
|
z1 |
|||||||||
|
|
|
z1 |
|
|
z2 |
|
|
|||
Таким образом, из условия (4.1) при заданных значениях чисел зубьев колес и величине угловых скоростей двух звеньев можно определить угловую скорость третьего звена, входящего в формулу Виллиса (4.1). Иногда требуется определить передаточное отношение планетарного механизма от 1-го звена к водилу Н или наоборот. В этом случае, преобразовав выражение (4.1) к виду
i(н) 1 / Н 1 |
, |
||
13 |
3 |
/ Н 1 |
|
|
|
||
можно найти i1Н 1 / Н при известном соотношении 3 / Н .
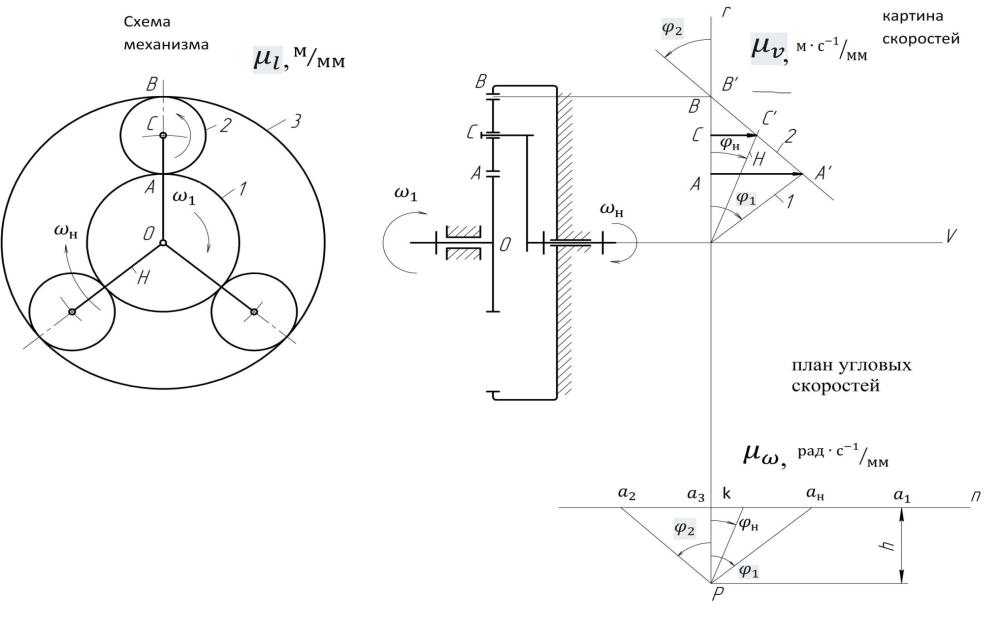
Графический метод исследования основан на построении треугольников линейных скоростей или плана угловых скоростей (частот вращения) для заданной схемы, которая вычерчивается в определенном масштабе (рис. 4.2, а, б). Метод прост, нагляден и достаточно удобен для анализа различных схем
54
Рис. 4.2. Графический анализ планетарного механизма
55
механизмов. На рис. 4.2 в, г представлены картина скоростей и план угловых скоростей для редуктора Джемса. Порядок построения – следующий. Имея заданные радиусы начальных окружностей колес r и угловую скорость одного из них, строят схему механизма в некотором масштабе и отмечают на ней характерные точки (центры колес и полюсы их зацепления). Эти точки переносят на базисную линию (ось радиусов). Определив линейную скорость первого колеса в т. А VA 1 rA , по горизонтали откладывают отрезок в мм AA VA V (задавшись
предварительно масштабом скоростей V ). Соединяя т. A с т. O , получают кар-
тину распределения скоростей по радиусу начальной окружности звена 1 в видеOAA (треугольник скоростей). Треугольник скоростей колеса 2 строят по из-
вестной линейной скорости каждой из двух точек А и В. Линейная скорость колеса 2 в т. В (мгновенном центре колеса 2 в абсолютном движении равны нулю, а т. А равна VA . Поэтому, соединяя A и В, получают линию скоростей колеса 2. При
этом отрезок CC представляет собой линейную скорость центра сателлита 2 и т. С водила. Треугольник скоростей для водила строят по скоростям точек С (отрезок CC ) и О, соединяя точки О и С линией скоростей для водила.
Для построения плана угловых скоростей из выбранного полюса р проводят лучи, параллельные ОА , ОС и ВА (рис. 4.2, г). На их пересечении с прямой mn ,
проведенной на произвольном расстоянии h kp , получают точки a1 , a2 , aН . Отрезки ka1 , kaH , ka2 , а1а2 изображают в масштабе 1 / ka1 угловые скорости1 , Н , 2 , 12 . При этом графически
i(3) |
ka1 |
tq 1 . |
|||
1H |
|
kaH |
|
tq H |
|
|
|
|
|||
Знак передаточного отношения определяется знаками углов 1 и Н .
Следовательно, графически передаточное отношение от центрального колеса j к водилу Н определяется как отношение тангенсов углов наклона линий скоро-
стей концевых валов к базисной линии треугольников скоростей.
4.3.Геометрический синтез планетарных механизмов
Впрактике машиностроения одной из наиболее важных проблем является выбор рациональной схемы и определение чисел зубьев Z колес планетарного механизма. Выбор той или иной схемы планетарного механизма производят с учетом необходимого передаточного отношения, технологических и конструктивных требований, условий геометрического характера. При этом различные схемы, имеющие одинаковое передаточное отношение, могут резко различаться по КПД, весу и габаритам. В настоящее время решены многие задачи синтеза зубчатых редукторов, одной из которых является задача геометрического синтеза планетарных механизмов.
56
4.3.1. Основные условия синтеза
Рассмотрим условия, которые необходимо учитывать при геометрическом синтезе планетарного механизма, на примере схем, представленных на рис. 4.1, и выразим эти условия в математической форме.
Кинематическое условие может быть получено из выражения, характеризующего передаточное отношение планетарного механизма. При этом используется формула Виллиса (4.1).
Для схем на рис. 4.1 кинематические условия можно записать в виде
i( Н ) |
Z3 |
|
1 |
Н , |
(схема «а»); |
|
|||||||||||
|
|
|
|
||||||||||||||
13 |
|
|
|
Z1 |
|
|
3 |
Н |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||||
i( Н ) |
|
|
Z2 |
|
|
Z3 |
1 |
Н , |
(схема «б»); |
(4.2) |
|||||||
|
|
|
|
||||||||||||||
13 |
|
|
Z1 |
|
|
|
Z2 |
3 |
Н |
|
|
||||||
|
|
|
|
|
|
|
|
||||||||||
i( Н ) |
Z2 |
|
|
|
Z3 |
|
1 |
Н , |
(схема «в», «г»). |
|
|||||||
|
|
|
|
|
|||||||||||||
13 |
|
|
Z1 |
|
|
|
|
Z2 |
3 |
Н |
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||||||
Условие соосности обеспечивает зацепление сателлитов с центральными колесами при расположении осей центральных колес и водила на одной прямой (рис. 4.1). Тогда соотношение радиусов начальных окружностей колес и водила имеет вид
rH r1 r2 r3 r2 , rH r1 r2 r3 r2 , rH r2 r1 r3 r2 , rH r1 r2 r3 r2 ,
где rj , rH − радиусы начальных окружностей При одинаковых модулях всех колес
(схема «а»); (схема «б»); (схема « «в); (схема «г»),
j -го зубчатого колеса и водила.
Z1 Z2 |
Z3 |
Z2 , |
(схема «а»); |
|
Z1 Z2 |
Z3 |
Z2 , |
(схема «б»); |
(4.3) |
Z2 Z1 Z3 |
Z2 , |
(схема «в»); |
|
|
Z1 Z2 |
Z3 |
Z2 , |
(схема «г»). |
|
Условие соседства (условие совместного размещения нескольких сателлитов по общей окружности) исключает задевание друг друга соседних сателлитов своими зубьями и должно выполняться при числе сателлитов R 3 (увеличение числа сателлитов уменьшает нагрузку на зубья колес). Для выполнения этого условия необходимо, чтобы расстояние между осями соседних сателлитов
АС 2(r1 r2 ) sin R ,
было больше максимального диаметра окружности вершин сателлита
57
dac 2(rc hac ) ,
где rc − радиус начальной окружности сателлита (в схемах б-г рассматривается зацепление с сателлитом наибольшего радиуса); hac − высота головки зуба сател-
лита.
При нулевых колесах условие в общем случае имеет вид
|
|
|
ZC 2 |
|
|
sin |
|
|
. |
(4.4) |
|
R |
Z1 Z 2 |
||||
Знак (+) в знаменателе соответствует внешнему, а знак (-) – внутреннему зацеплению колес 1 и 2.
Условие сборки (условие равных углов между сателлитами) учитывает необходимость одновременного зацепления всех сателлитов с центральными колесами при симметричной геометрии зон зацепления.
После установки первого сателлита и поворота водила на угол 2 / R рад. необходимо в то же самое место установить следующий сателлит. Это можно осуществить, если зубья колес второго блока сателлитов окажутся точно против впадин зубьев центральных колес, иначе осуществить сборку невозможно. Для формирования условия необходимо принять, что оба колеса всех R блоков сателлитов имеют одинаковую ориентацию зубьев друг относительно друга. Если блок состоит из одного сателлита (схема «а»), то необходимость выполнения этого требования отпадает. Установим первый сателлит на ось. Для поворота водила на угол 2 / R рад. необходимо первое колесо повернуть на угол
1 i1(H3) 2 / R 2 n ,
где n − любое целое число, означающее, что требуемое положение водила соответствует углу 2 / R 2 n рад. С другой стороны, угол поворота первого ко-
леса должен быть кратным его угловому шагу зубьев − 2 / Z1 . В противном случае при повороте колеса 1 на угол 1 положение зубьев этого колеса изменится и вставить второй сателлит будет невозможно. Таким образом,
|
|
|
|
2 р |
, |
|
||||
|
|
|
|
|
|
|||||
|
|
|
1 |
|
|
Z1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где р – целое число. Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
2 p |
i(3) |
|
2 |
|
|
|
||
|
|
|
|
|
|
|
2 n , |
|||
|
|
|
|
|
|
|||||
|
|
Z1 |
1H |
|
|
R |
|
|
|
|
или с учетом кинематического условия (4.1) |
|
|||||||||
Z |
(1 i(H ) )(1/ R n) p . |
(4.5.) |
||||||||
1 |
13 |
|
|
|
|
|
|
|
|
|
Условие правильного зацепления (условие отсутствия заклинивания передачи и подреза зубьев). Для планетарных механизмов с нулевыми колесами при пара-
метрах производящего контура режущего инструмента 20 и ha* 1,0 мини-
58
мальное число зубьев колес внешнего зацепления должно быть не менее Zmin 17 . Для колес с внутренними зубьями Z Zmin 85 , а для сцепляющихся с
ними колес Z Zmin 20 .
4.3.2. Методика подбора чисел зубьев колес
При решении задачи подбора чисел зубьев можно использовать следующие соображения. Для редуктора по схеме «а» характерна однозначность решения задачи (при заданной величине R ), так как, имея три условия в виде равенств (кинематическое, условие соосности и сборки) и три неизвестных ( Z1 , Z2 , Z3 ), можно
их найти из соответствующих уравнений. Тогда
|
|
Z |
|
|
|
Rp |
|
|
|
|
|
|
1 |
; |
|
|
|||||
|
|
1 |
1 nR |
|
|
i |
(3) |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1H |
|
|||||
|
|
|
|
|
|
|
|
Rp |
|
i(3) |
2 |
|
|||||||||
Z |
|
|
|
|
|
|
|
|
|
|
1H |
|
|
|
|
; |
|||||
2 |
1 |
nR |
|
|
|
2i |
(3) |
|
|||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1H |
|
||||
|
|
|
|
|
|
|
|
Rp |
|
|
|
i |
(3) |
|
1 |
|
|||||
Z |
|
|
|
|
|
|
|
|
|
1H |
|
|
|
. |
|||||||
3 |
1 |
nR |
|
|
|
|
i |
(3) |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1H |
|
|||||
При этом р может принимать значение, соответствующие целочисленным значениям Z j с учетом условий соседства (4.4) и правильного зацепления.
Если кинематическое условие (4.1) для схемы |
|
«а» при 3 |
0 |
записать в ви- |
|||||||||||||||||||||
де |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i(3) |
1 |
В |
, |
или |
|
i |
( H ) |
В |
, |
|
(4.6) |
||||||||||||||
1H |
|
|
|
|
А |
|
|
|
|
1.3 |
|
|
|
А |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
где А и В – некоторые коэффициенты, то |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
Z1 |
|
|
|
|
|
А |
|
|
|
|
Rp |
|
|
|
; |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
( А В) |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
(1 |
nR) |
|
|
|||||||||||||
|
Z |
|
|
|
В А |
|
|
|
|
Rp |
|
; |
|
|
|||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
2( А В) |
|
|
(1 nR) |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
Z3 |
|
|
|
|
|
В |
|
|
|
|
|
Rp |
. |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
( А |
|
(1 nR) |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
В) |
|
|
|
|
|
|
|
|
|||||||||||||
Задача подбора чисел зубьев Zi колес планетарных механизмов по схемам
«б-г» имеет множество возможных решений. Для нахождения одного из допустимых решений могут быть использованы упрощенные методы, одним из которых является метод сомножителей.
Представим числа зубьев в виде сомножителей:
|
|
Z2 Сt; |
|
Z1 At ; |
Z2 Вt ; |
Z3 Dt . |
59
Условия соосности (4.3) после подстановки в них этих выражений превращаются в тождества при
D C; |
А В, |
где знак (-) соответствует внутреннему зацеплению колес 2 и 3 (в выражении для определения ) и колес 1 и 2 (в выражении для определения ). Подставив эти выражения в кинематические условия (4.2) получим
|
В |
|
D |
|
1 |
H |
i( H ) , . |
(4.7.) |
|
|
|
|
|||||
|
А C |
3 |
H |
13 |
|
|||
|
|
|
||||||
где знак (-) соответствует схеме «а», «б»; знак (+) соответствует схемам «в», «г». Таким образом, величину i13( H ) можно представить в виде четырех сомножи-
телей А, В, С, D, |
при этом условие сборки (4.5) может быть записано, как |
|||||
|
(3) |
1/ R n p, |
||||
|
Аt i1H |
|||||
где |
i(3) 1 |
В |
|
D |
. |
|
|
|
|||||
|
1H |
|
А C |
|||
|
|
|
||||
Здесь знак (+) соответствует схеме «б»; знак (-) соответствует схема «в», «г».
Для редуктора по схемам «б» - «г» число t можно представить в виде (из
условия целочисленности Z j |
и р). |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
tR |
, |
|
|||
|
|
|
|
|
|
|||||
где t 1, 2, … − |
любое целое положительное число; |
− наибольший общий |
||||||||
делитель для чисел |
P , P , P …., равных: |
|
|
|||||||
|
1 |
2 |
3 |
|
|
|
|
|
|
|
|
P R AC; |
P R CD; |
|
|
||||||
|
1 |
|
|
4 |
|
|
|
|
|
|
|
P2 R ВC; |
P5 (1 Rn)(AC BD) |
||||||||
P3 R C 2 .
Здесь знак (+) соответствует схеме «б»; знак (-) соответствует схемам «в», «г». Тогда
Z1 RtAC; Z1 |
|
RtBC; |
Z2 RtC2 ; Z3 |
RtCD. |
|
|
|
|
|
|
|
Число t задается с учетом условий Z j Zmin |
при Zmin |
17 − для внешнего за- |
|||
цепления или Zmin 20 и |
|
Zmin 85 − для внутреннего зацепления. |
|||
4.3.3. Выбор оптимальной схемы механизма