

2.6.4. Оценка качества переходных процессов
Рассмотрим некоторые виды переходных процессов устойчивых САР. Переходные процессы неустойчивых систем особого интереса не представляют, поскольку такие системы не работоспособны.
Координаты характеристик, приведённых на рисунках 11 и 12:
t – время, с; φ – относительное изменение регулируемого параметра
Основные показатели качества переходных процессов:
Т – длительность переходного процесса;
Δст – статическая ошибка регулирования;
Δдин – динамическая ошибка регулирования;
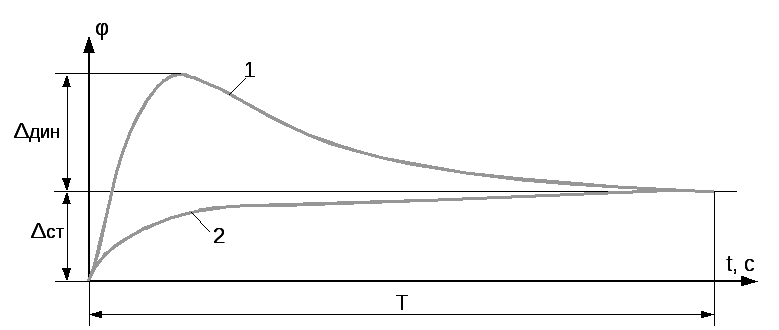
переходный процесс с перерегулированием (забросом);
переходный процесс с монотонным изменением регулируемого параметра.
Рисунок 2.16. Переходные процессы статической системы регулирования

Рисунок 2.17. Переходный процесс астатической системы регулирования
Принцип оценки качества: чем меньше Т, Δст и Δдин – тем лучше.
Кроме того, оценивают также наличие или отсутствие затухающих колебаний, наличие или отсутствие незатухающих колебаний (автоколебаний).
Для комплексной оценки применяют также интегральный критерий. На приведённых выше графиках это площадь под соответствующей характеристикой.
Улучшить качество переходного процесса можно путем оптимизации параметров регулятора и введения в его состав специальных корректирующих цепочек из типовых динамических звеньев.
2.6.5. Типовые динамические звенья
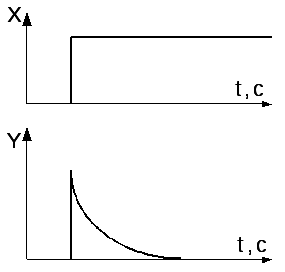
Свойства типовых динамических звеньев принято описывать либо аналитическими выражениями (передаточными функциями W), либо переходными процессами, характеризующими изменение во времени выходного сигнала звена Y при подаче на его вход ступенчатого, импульсного или гармонического (синусоидального) сигнала X.
![]()
Передаточная функция звена – это отношение выходного сигнала к входному, преобразованное по Лапласу.
Передаточные функции получают на основе дифференциальных уравнений, описывающих динамические свойства звеньев.
Поскольку нет особой уверенности в Ваших панибратских отношениях с дифференциальными уравнениями и господином Лапласом, есть смысл применить более простой и наглядный метод сравнительного анализа переходных процессов, представленных в графической форме.
Входной сигнал будем подавать в виде ступенчатой функции времени.
В приведённой ниже таблице показаны характерные реакции типовых динамических звеньев на ступенчатое изменение входного сигнала
|
Усилительное (безынерционное) звено
|
Звено задержки
|


|
Апериодическое звено: а) – первого порядка б) – второго порядка
|
Дифференцирующее звено (реальное)
|
|
Интегрирующее звено
|
Колебательное звено (устойчивое)
|



2.7. Структурная схема сар
Свойства любой системы определяются свойствами её составных элементов (звеньев) и характером их соединения – топологией системы. Всё вместе называется структурой системы, а её графическое изображение называют структурной схемой системы.
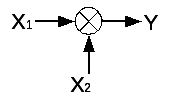
При построении структурной схемы САР используют следующие условные обозначения:
|
|
Звено (элемент) системы |
|
|
Линия передачи сигнала |
|
|
Сумматор: Y = X1 + X2 |
|
|
Звено вычитания : Y = X1 - X2 |

Структурная схема САР, в которой реализован принцип регулирования по отклонению, будет иметь следующий вид:

Условные обозначения на схеме:
WО – передаточная функция объекта;
WР – передаточная функция регулятора;
X – регулируемый параметр;
f(t) –нагрузка, случайно изменяющаяся во времени;
μ – относительное перемещение регулирующего органа;
Y – совместное воздействие на объект нагрузки и регулятора.
Как видно из схемы, регулятор является отрицательной обратной связью по отношению к объекту.