

2.4.2Б Недостатки пневматических устройств:
возможность засорения элементов с малыми проходными сечениями и обводнения системы при некачественной очистке и осушке воздуха;
зависимость рабочих характеристик от температуры и атмосферного давления;
запаздывание сигнала при передаче на большие расстояния (более 20 метров) из-за сжимаемости воздуха;
меньший, по сравнению с гидравликой, диапазон усилий и моментов, развиваемых исполнительным механизмом.
2.4.3А Преимущества электрических устройств:
неограниченный радиус действия, передача сигналов на большие расстояния практически без временных задержек;
возможность реализации сложных алгоритмов обработки информации;
независимость рабочих характеристик исполнительных устройств от атмосферных условий;
высокая степень унификации, возможность применения сравнительно дешёвых стандартных электронных элементов;
возможность подключения к судовым системам электроснабжения.
2.4.3Б Недостатки электрических устройств:
меньший, по сравнению с гидравликой и пневматикой, диапазон усилий и моментов, развиваемых исполнительным механизмом;
меньшая устойчивость к неблагоприятным условиям эксплуатации (ударам, вибрации, повышенной температуре, морскому туману);
повышенные требования к уровню квалификации обслуживающего персонала.
относительно низкая надёжность контактных элементов.
В комбинированных устройствах удаётся, в какой-то степени, совместить преимущества и компенсировать недостатки разных типов энергии.
2.5. Статические характеристики регуляторов непрямого действия
Построим совмещённые характеристики регулятора и его блоков, расположив их в следующем порядке:
в 1 квадранте поместим характеристику регулирования, т.е. зависимость регулируемого параметра φ от нагрузки (в качестве меры нагрузки использовано положение регулирующего органа μ);
во 2 квадранте поместим характеристику измерительного устройства, т.е. зависимость его выходного сигнала Z от измеряемого параметра φ;
в 3 квадранте поместим характеристику силового блока (усилитель+ исполнительный механизм), т.е. зависимость положения регулирующего органа μ от выходного сигнала измерителя Z.

Рисунок 2.11. Номинальные характеристики регулятора непрямого действия
В результате получим номинальные характеристики, показанные на рис.2.11.
Буквами ХХ и ПН обозначены точки характеристик, соответствующие холостому ходу (нагрузка нулевая) и полной нагрузке (100%).

Рисунок 2.12. Первый способ настройки статической характеристики
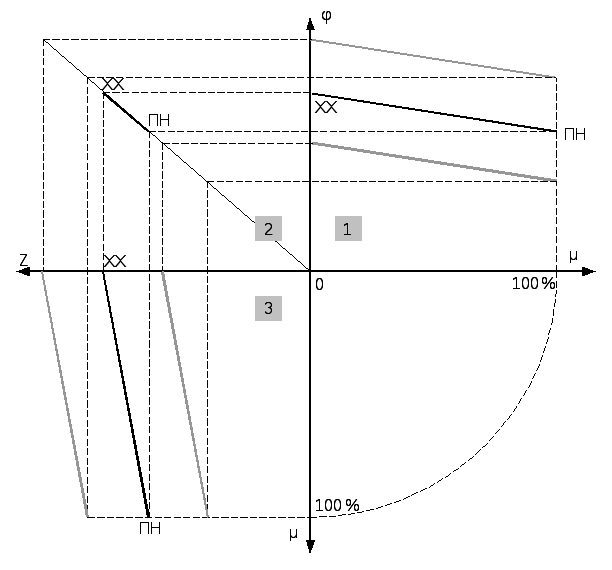
Рисунок 2.13. Второй способ настройки статической характеристики
На приведённых выше рисунках показаны два способа настройки характеристики регулятора:
перестройка характеристики регулирования в сторону увеличения или уменьшения заданного значения регулируемого параметра путём изменения (параллельного смещения) характеристики измерительного устройства (рис.2.12)
перестройка характеристики регулирования в сторону увеличения или уменьшения заданного значения регулируемого параметра путём изменения (параллельного смещения) характеристики силового блока (рис.2.13).
.
В целом, о статических характеристиках можно сказать, что они представляют собой совокупность значений того или иного параметра САР (системы автоматического регулирования) на ряде установившихся режимов.
Наибольший интерес для оценки качества регулирования энергетических объектов представляет зависимость регулируемого параметра от нагрузки, которая называется статической характеристикой регулирования.