

Принцип регулирования «по отклонению»
В САР, использующих этот принцип, регулятор управляет положением регулирующего органа в соответствии с результатами измерения контролируемого параметра (в данном примере – уровня H).
Случайное внешнее возмущение нарушает динамическое равновесие системы и приводит к отклонению регулируемого параметра от заданного значения. В соответствии с величиной этого отклонения регулятор изменяет положение регулирующего органа и тем самым компенсирует влияние возмущения на величину регулируемого параметра.
Достоинства и недостатки этого принципа являются зеркальным отражением особенностей принципа регулирования «по возмущению».
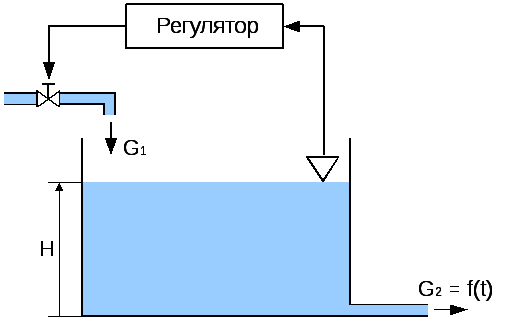
Рис.2.3 Регулирование «по отклонению»
Преимущества принципа регулирования по возмущению:
Регулятор реагирует на отклонение регулируемого параметра независимо от того, какие причины его вызвали.
САР, реализующая такой принцип регулирования, является замкнутой, поскольку входные воздействия на объект формируются в соответствии с результатами контроля его выходного параметра. В такой системе нет необходимости обеспечения и поддержания во время эксплуатации сверхточных характеристик отдельных элементов системы, поскольку отдельные погрешности могут несколько исказить результаты регулирования, но не могут привести к неустойчивости работы объекта.
Недостатки принципа регулирования по возмущению:
Этот принцип не обеспечивает точное поддержание регулируемого параметра во всём диапазоне изменения нагрузки, поскольку разным уровням нагрузки должны соответствовать разные положения регулирующего органа (чем больше расход G2 , тем больше должен быть открыт клапан на подводящем трубопроводе). Поэтому отличительной чертой данного принципа является наличие статической ошибки регулирования – изменения регулируемого параметра при изменении нагрузки от 0 до 100%.
Регулятор начинает существенно воздействовать на объект только при заметном отклонении регулируемого параметра, т.е. реагирует на возмущение с некоторым запаздыванием. Эта особенность может приводить к возникновению динамической ошибки регулирования – временному отклонению параметра в процессе регулирования (динамическую ошибку называют также перерегулированием или динамическим забросом).
Тем не менее, несмотря на указанные недостатки, принцип регулирования по отклонению позволяет создать вполне работоспособную САР, обеспечивающую длительную устойчивую работу объекта и стабилизацию регулируемого параметра с приемлемой для многих практических задач точностью.
Можно ли каким-то образом совместить достоинства обоих принципов и нейтрализовать их недостатки?
Этого можно добиться применением двухимпульсных регуляторов, предусматривающих измерение и регулируемого параметра и нагрузки:

Рис.2.4 Двухимпульсное регулирование
Другим способом улучшения качества регулирования является применение в составе регулятора специальных корректирующих цепочек.
2.3. Классификация конструктивных типов регуляторов
Рассмотренные ранее принципы регулирования могут быть конструктивно реализованы регуляторами различных типов (см. рисунок 2.5):
Рисунок 2.5 