

2.2. Определение перемещений в стержневой системе
При расчете статически неопределимых систем, кроме уравнений равновесия, как известно, приходится составлять и решать уравнения совместности деформаций системы. Для составления таких уравнений необходимо уметь определять перемещения заданной системы. Это приходится часто делать и при расчете статически определимых систем, которые должны обладать не только достаточной прочностью, но и жесткостью, так как в процессе их эксплуатации нормируются не только напряжения, но и перемещения конструкций.
Таким образом, изучение общих методов определения перемещений упругих систем является одной из основных задач строительной механики.
При определении перемещений заданной системы очень важным является понятие работы внешних сил на возможных перемещениях, которая при их статическом действии на сооружение равна сумме половины произведения значения этих сил на величину соответствующего им перемещения. Работа внешних сил на вызванных ими перемещениях может быть выражена через внутренние усилия (изгибающие моменты, продольные и поперечные силы), возникающие в поперечных сечениях стержней конструкции. На этом основан один из наиболее распространенных способов определения перемещений - способ, предложенный немецким ученым О. Моpом в 1874г.
Пусть рассматриваемая заданная стержневая система под влиянием внешнего воздействия деформируется и требуется определить обобщенное перемещение в i-ой произвольной точке (рис. 2.4) в заранее заданном направлении.
Согласно принципа возможных перемещений, для закрепленной системы с идеальными связями, сумма работ всех усилий на любых малых возможных перемещениях равна нулю. Что является необходимым и достаточным условием нахождения равновесного состояния рассматриваемой системы. Для деформируемой системы, в аналитическом выражении начала возможных перемещений, следует учесть работу, как внешних, так и внутренних усилий.
Рассмотрим два состояния системы: одно, возникающее под действием заданной нагрузки (рис. 2.4, а); второе - под действием единичной силы, приложенной в интересующей нас точке i по направлению искомого перемещения (рис. 2.4, б). Определим возможную работу сил второго состояния на перемещениях первого состояния.
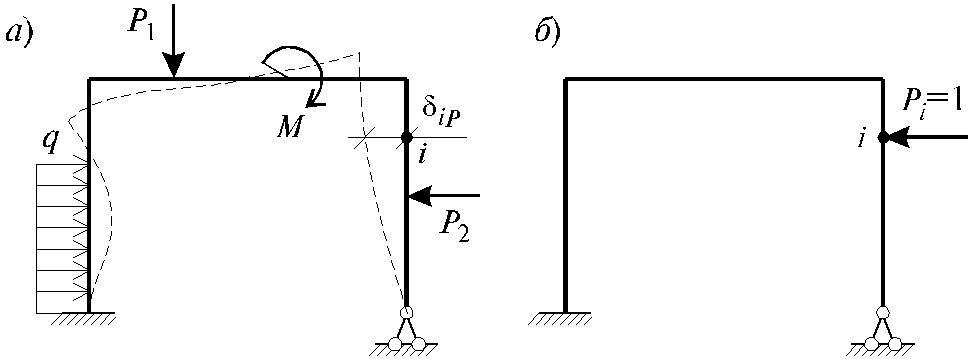
Работа внешней силы Рi = 1:
dV = 1×diP , (2.1)
где diP - перемещение i-ой точки по направлению силы Рi = 1 в первом состоянии, вызванной действием системы внешних сил.
Работа внутренних усилий, как известно из курса “Сопро-тивления материалов” [9], была представлена в виде:
 , (2.2)
, (2.2)
где
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() - усилия
в первом и втором состоянии,
соответственно; EJj ,
EFj ,
GFj - жесткости
на изгиб, растяжение-сжатие
и сдвиг, соответственно,
для j-ого
стержня; h -коэффициент,
зависящий от формы поперечного сечения,
для прямоугольного сечения h = 1.2.
- усилия
в первом и втором состоянии,
соответственно; EJj ,
EFj ,
GFj - жесткости
на изгиб, растяжение-сжатие
и сдвиг, соответственно,
для j-ого
стержня; h -коэффициент,
зависящий от формы поперечного сечения,
для прямоугольного сечения h = 1.2.
В силу принципа возможных перемещений: dA + dV = 0, т.е. работа внешних сил равна работе внутренних сил с обратным знаком dV = -dA, далее, учитывая (2.1) и (2.2), получим:
 . (2.3)
. (2.3)
Это выражение носит название фоpмyлы Моpа. Замечательной особенностью вычисления перемещений по формуле Моpа является то обстоятельство, что в качестве второго состояния можно использовать любую систему, образованную из заданной путем отбрасывания лишних связей, т.е. брать в качестве вспомогательного состояния любую статически определимую систему, полученной из заданной. Это в значительной степени упрощает процедуру вычисления перемещения по формуле Мора.
Во многих практических случаях формула Мора может быть значительно упрощена. Например, в статически неопределимых фермах изгибающие моменты и поперечные силы пренебрежимо малы, а продольные силы постоянны по длине каждого стержня. Поэтому для ферм формула Моpа принимает вид:
![]() . (2.4)
. (2.4)
В рамах обычно пренебрегают влиянием вторых и третьих членов (2.3), так как эти члены незначительно влияют на величину перемещений:
 . (2.5)
. (2.5)
Продольные силы вместе c изгибающими моментами учитывают в расчете систем, элементы которых испытывают значительные осевые деформации, сравнимые c деформациями от изгибающих моментов, например, в арках, а также при учете податливости отдельных элементов систем, работающих преимущественно на сжатие или растяжение, например, затяжек в рамах или арках.
Интеграл Мора, наряду с методом начальных параметров, является достаточно мощным инструментом для определения перемещений стержневых систем. Проиллюстрируем это на примере.
Для ломаного бруса, изображенного на рис. 2.5, а определим угол поворота поперечного сечения С относительно вертикальной оси. Пусть жесткость ригеля в два раза больше жесткости стойки, т.е. EJр = 2×EJc .
Последовательность расчета следующая:
1) строим эпюру моментов Мn от заданной нагрузки q (эпюра моментов действительного состояния n рис. 2.5, б);
2) строим эпюру моментов Мm при загружении конца консоли единичным моментом M = 1 (эпюра моментов фиктивного состояния m, рис. 2.5, в);
3) выразим изгибающие моменты через переменные абсциссы x:
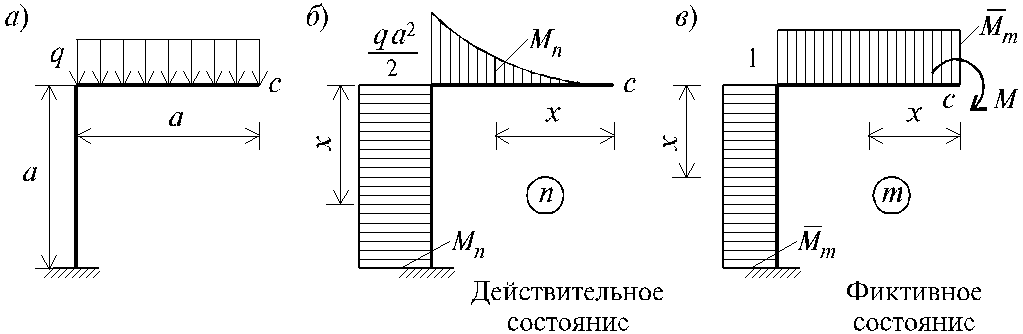
Рис. 2.5
4) применяя формулу перемещений (2.5), найдем искомый угол поворота:

 (рад).
(рад).