

ТАУ отчёт №7
.docxСанкт-Петербургский Государственный Политехнический Университет
Факультет Технической Кибернетики
Кафедра Компьютерных Систем и Программных Технологий
ОТЧЁТ О ЛАБОРАТОРНОЙ РАБОТЕ №7
Дисциплина: Теория автоматического управления
Тема: Синтез модального управления
Вариант №3
Д.А.
Киселёв Л.В. Бабко
Преподаватель
Санкт-Петербург
2012
Цель работы:
Изучение метода модального синтеза систем управления.
1. Первая часть работы:
Синтез модального управления для системы второго порядка.
Исходные данные:


 tp
= 2 c
σ
= 30%
tp
= 2 c
σ
= 30%
1.1.1. Проверка возможности модального управления
Матрица
управляемости

1.1.2. Характеристический полином исходной (разомкнутой) системы:

 ;
;
 следовательно, исходная система
неустойчива.
следовательно, исходная система
неустойчива.
Собственные числа матрицы А исходной системы:

1.1.3. Матрицы заданной системы в форме УКП





1.1.4. Определение значений степени устойчивости и степени колебательности
Степень
устойчивости

Степень
колебательности

1.1.5. Желаемый характеристический полином системы




1.1.6. Матрица линейной обратной связи

1.1.7. Матрица обратной связи для исходной системы

1.1.8. Моделирование системы в приложении Simulink
Схема замкнутой системы:
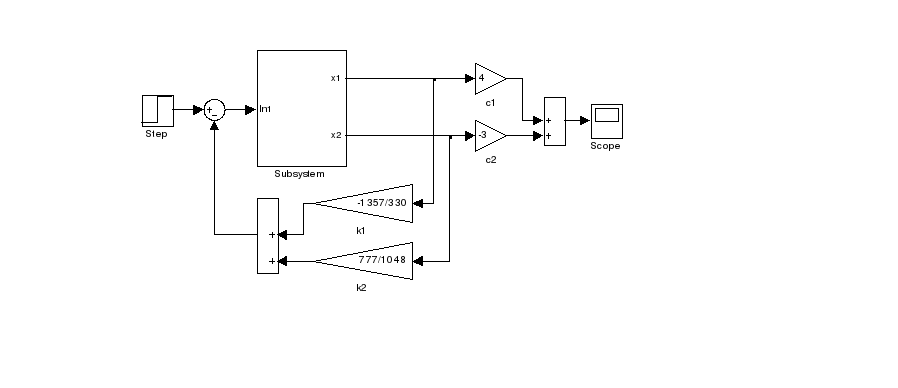
Блок Subsystem представляет схему исходной системы:
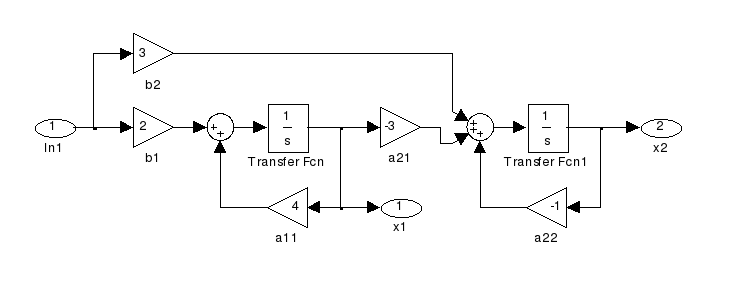
Переходный процесс в исходной (разомкнутой) системе:
Переходный процесс в замкнутой системе:
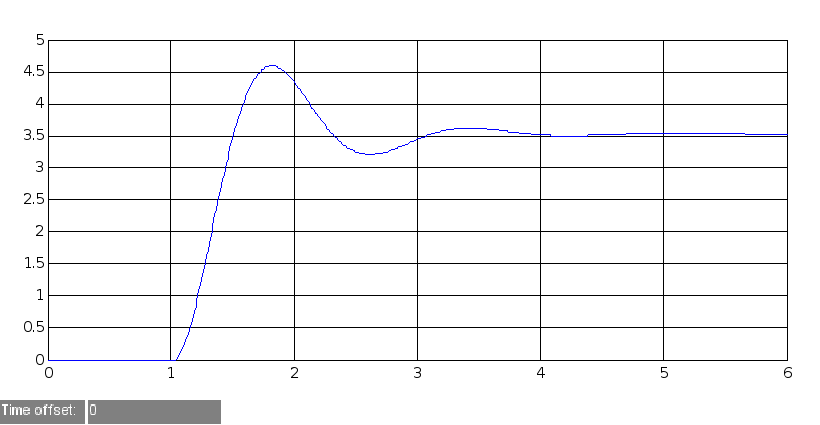
Установившееся значение выходного сигнала – 3.529
Время переходного процесса tp = 1.89 с, отличается от заданного (2 с) на 5.5%
Перерегулирование σ = (4.59 - 3.529)/3.529 = 30.065%, отличается от заданного на 0.22%
1.2. Получение апериодического процесса (σ = 0)
Все вычисления, кроме указанных ниже, совпадают с пунктом 1.1.
Степень
устойчивости

Степень
колебательности

Желаемый характеристический полином системы:


Матрица линейной обратной связи:


Моделирование системы в приложении Simulink: Схемы аналогичны схемам в пункте 1.1, только с другими коэффициентами усиления в обратной связи.
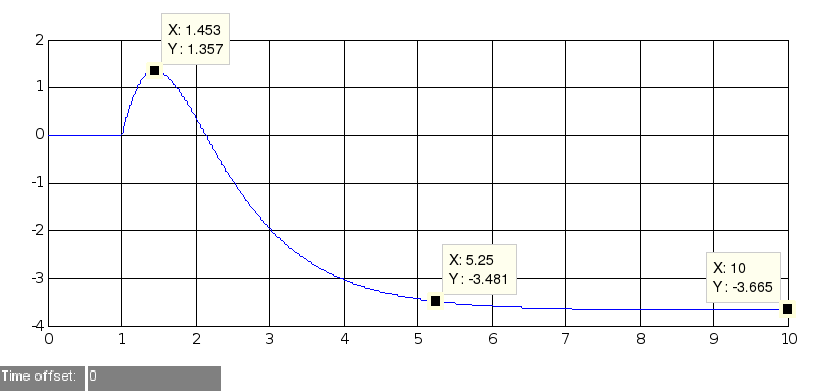
Переходный процесс в замкнутой системе:
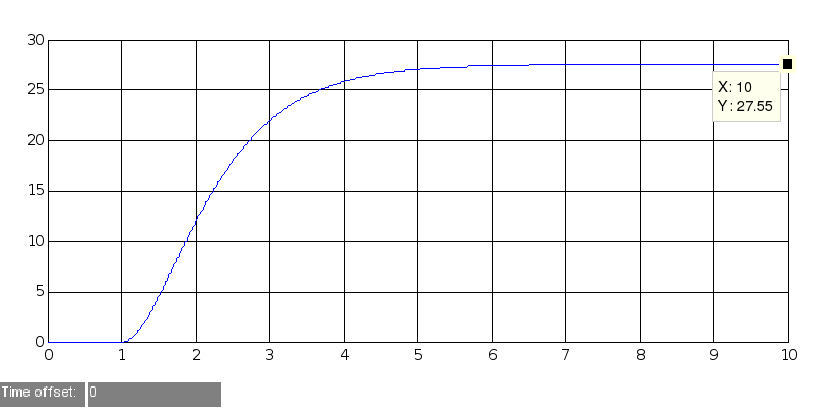
Время переходного процесса tp = 3.17 с
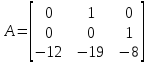
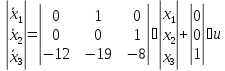
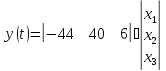
2. Вторая часть работы:
Синтез модального управления для системы третьего порядка.
Исходные данные:
2.1. Проверка возможности модального управления
 ,
,
 ,
,

 ,
,
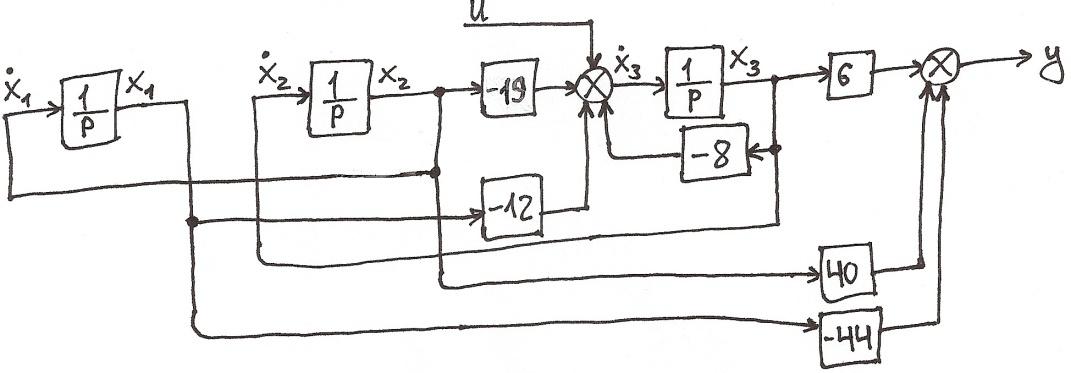
Структурная схема системы:
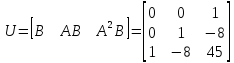
 следовательно,
модальное управление возможно.
следовательно,
модальное управление возможно.
2.2. Характеристический полином исходной системы
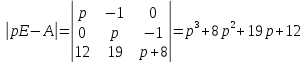
 ;
;
 ;
;
 следовательно, система устойчива.
следовательно, система устойчива.
2.3. Определение степени устойчивости и степени колебательности
Степень
устойчивости

Степень
колебательности

2.4. Желаемый характеристический полином


Ещё один корень выберем так, чтобы не нарушать предыдущих условий.


2.5. Матрица линейной обратной связи

2.6. Моделирование системы в приложении Simulink
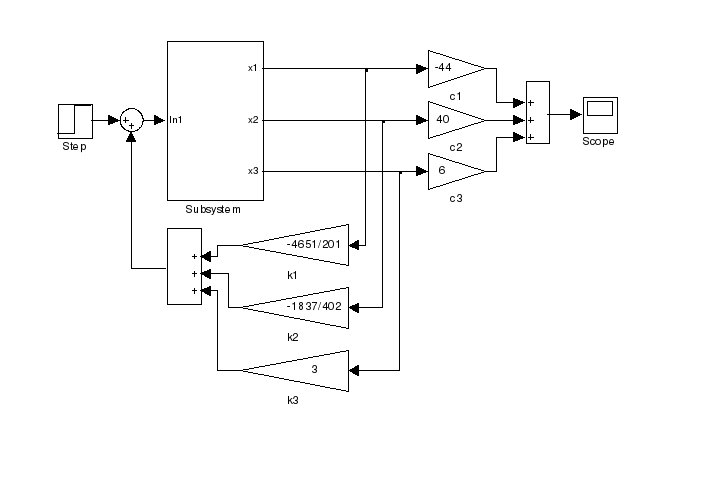
Схема замкнутой системы:
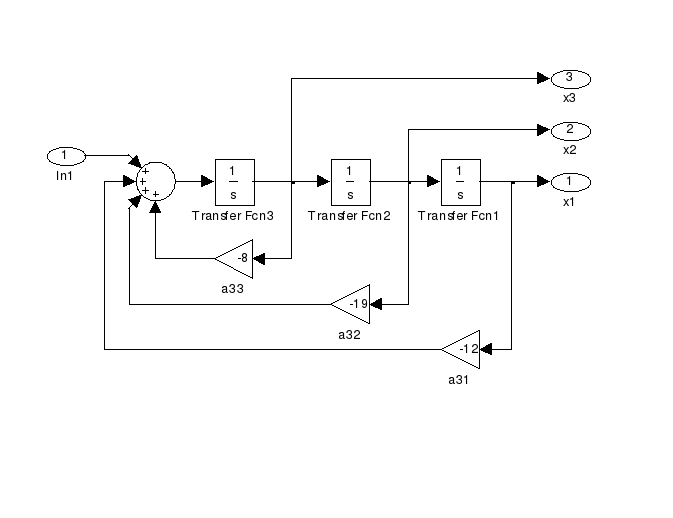
Блок Subsystem представляет схему исходной системы:
Переходный процесс в исходной системе:
Время переходного процесса tp = 4.25 с
Переходный процесс в разомкнутой системе:
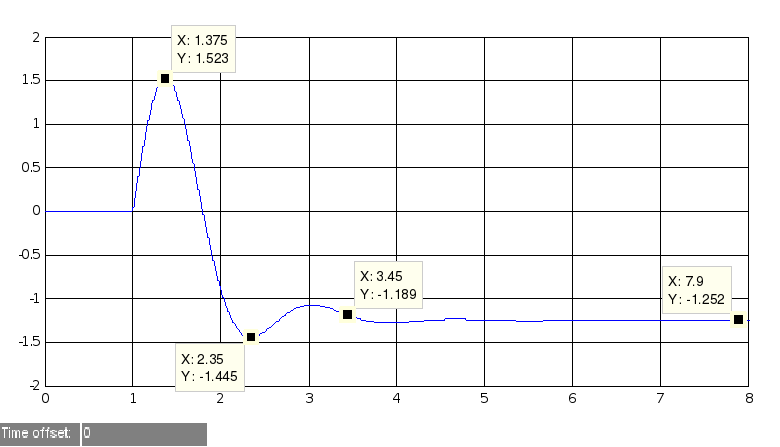
Время переходного процесса tp = 2.45 с, отличается от заданного (2 с) на 22.5%
3. Вывод
Модальное управление позволяет задать необходимое расположение полюсов замкнутой системы, которое определяет характер переходного процесса.