

AC and DC Parameters
7.8Unidirectional data write cycle timing
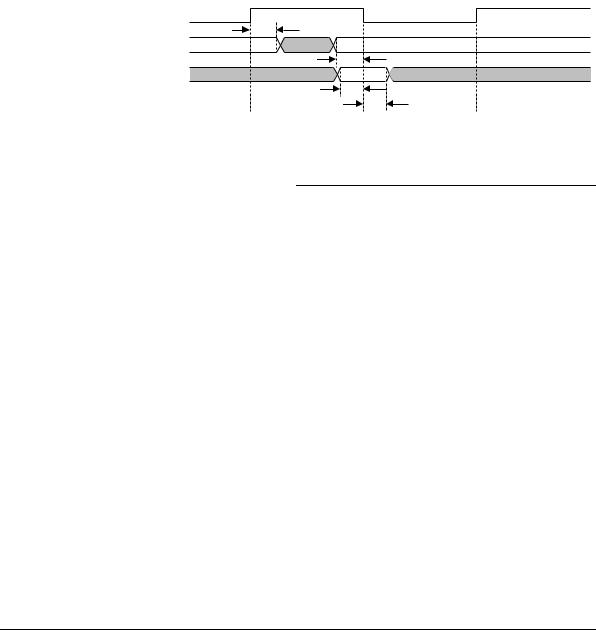
Figure 7-7 shows the ARM7TDMI processor unidirectional data write cycle timing. The timing parameters used in Figure 7-6 on page 7-10 are listed in Table 7-6 on page 7-10.
MCLK
Tnen
nENOUT
Tdohu
DOUT[31:0]
Tdoutu
Figure 7-7 Unidirectional data write cycle timing
Table 7-7 Unidirectional data write cycle timing parameters
Symbol |
Parameter |
Parameter type |
|
|
|
Tdohu |
DOUT[31:0] hold time from MCLKf |
Minimum |
Tdoutu |
MCLKf to DOUT[31:0] valid |
Maximum |
Tnen |
MCLKf to nENOUT valid |
Maximum |
ARM DDI 0029G |
Copyright © 1994-2001. All rights reserved. |
7-11 |

AC and DC Parameters
7.9Unidirectional data read cycle timing
Figure 7-8 shows the ARM7TDMI processor unidirectional data read cycle timing. The timing parameters used in Figure 7-7 on page 7-11 are listed in Table 7-7 on page 7-11.
MCLK
nENOUT
|
Tnen |
|
|
|
|
|
|
|
Tdisu |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
DIN[31:0]
Tdihu
BL[3:0]
Tbylh
Tbyls
Figure 7-8 Unidirectional data read cycle timing
Table 7-8 Unidirectional data read cycle timing parameters
Symbol |
Parameter |
Parameter type |
|
|
|
Tbylh |
BL[3:0] hold time from MCLKf |
Minimum |
Tbyls |
BL[3:0] set up to from MCLKr |
Minimum |
Tdihu |
DIN[31:0] hold time from MCLKf |
Minimum |
Tdisu |
DIN[31:0] set up time to MCLKf |
Minimum |
Tnen |
MCLKf to nENOUT valid |
Maximum |
7-12 |
Copyright © 1994-2001. All rights reserved. |
ARM DDI 0029G |
AC and DC Parameters
7.10Configuration pin timing
Figure 7-9 shows the ARM7TDMI processor configuration pin timing. The timing parameters used in Figure 7-9 are listed in Table 7-9.
MCLK
Tcth
BIGEND
Tcts
ISYNC
Tcts
Tcth
Figure 7-9 Configuration pin timing
Table 7-9 Configuration pin timing parameters
Symbol |
Parameter |
Parameter type |
|
|
|
Tcth |
Configurations hold time |
Minimum |
Tcts |
Configuration setup time |
Minimum |
ARM DDI 0029G |
Copyright © 1994-2001. All rights reserved. |
7-13 |

AC and DC Parameters
7.11Coprocessor timing
Figure 7-10 shows the ARM7TDMI processor coprocessor timing. The timing parameters used in Figure 7-10 are listed in Table 7-10.
Phase 1 |
Phase 2 |
|
MCLK |
|
|
Tcpi |
Tcpih |
|
nCPI |
|
|
CPA |
Tcps |
|
|
||
CPB |
Tcph |
|
nMREQ |
||
|
||
SEQ |
|
Tcpms
Figure 7-10 Coprocessor timing
Note
In Figure 7-10, usually nMREQ and SEQ become valid Tmsd after the falling edge of MCLK. In this cycle the core has been busy-waiting for a coprocessor to complete the instruction. If CPA and CPB change during phase 1, the timing of nMREQ and SEQ depends on Tcpms. Most systems can generate CPA and CPB during the previous phase 2, and so the timing of nMREQ and SEQ is always Tmsd.
Table 7-10 Coprocessor timing parameters
Symbol |
Parameter |
Parameter type |
|
|
|
Tcph |
CPA,CPB hold time from MCLKr |
Minimum |
Tcpi |
MCLKf to nCPI valid |
Maximum |
Tcpih |
nCPI hold time from MCLKf |
Minimum |
Tcpms |
CPA, CPB to nMREQ, SEQ |
Maximum |
Tcps |
CPA, CPB setup to MCLKr |
Minimum |
7-14 |
Copyright © 1994-2001. All rights reserved. |
ARM DDI 0029G |