

2-Konspekt_lektsiy_MS
.pdfсимволи NP (Not Print – Не друкувати), то результати моделювання з’являться у вікні REPORT.
Діагностичні повідомлення про помилки в програмі відображуються у вікні JOURNAL із зазначенням номера рядка (Line) і позиції в рядку (Col), де виявлена помилка. Щоб швидко вийти на рядок, де виявлена помилка, можна використовувати пункт головного меню Search і далі Go to Line → Enter Line Number (Уведіть номер рядка).
Система GPSS W забезпечує можливість копіювання і передачі тексту програм усередині вікна, між вікнами, а також між вікнами і будь-яким додатком, із використанням буферу обміну даними.
У процесі роботи система GPSS W дозволяє використання багатьох вікон: Model – повноекранного текстового редактора моделі; JOURNAL – журналу для запису повідомлень; Blocks Window – динаміки переміщення вимог по блоках; Expressions Window – значень виразів; Facilities Window – динаміки станів каналів обслуговування; Logicswitches Window – динаміки логічних перемикачів; Matrix Window – динаміки значень елементів матриці; Plot Window – графіків; Queues Window – динаміки черги; Savevalues Window –
динаміки зміни значень величин, що зберігаються; Storages Window – динаміки зміни значень параметрів накопичувача; Table – динаміки зміни значень таблиці; Transaction Snapshot – стану транзакта; СЕС Snapshot – стану ланцюга поточних подій; FEC Snapshot – стану ланцюга майбутніх подій.
Перегляд значень обумовлених параметрів у динаміці. Для відображення значень обумовлених параметрів у динаміці використовується вікно Expressions Window, яке можна відкрити в процесі моделювання. (попередньо модель повинна бути відтрансльована). Слід активізувати пункти ниспадного меню пункту Window головного меню → Simulation Window Expressions Window. З’являться два вікна: Edit Expression Window (Вікно редагування виразу) і EXPRESSIONS (Вирази). Далі ввести у відповідні текстові поля вікна Edit Expression Window послідовно вирази, які потрібно переглянути в динаміці, наприклад: коефіцієнт використання каналу FR$KAN; максимальну довжину черги QM$OCH; середню довжину черги Q$OCH.
Для цього в полях Label (Мітка) і Expression (Вираз) послідовно ввести потрібні вирази. Після введення назви і виразу активізувати кнопки View (Перегляд) і Memorize (Запам’ятати) (рис. 8.3).
У вікні EXPRESSIONS відображатимуться значення обраних параметрів, що змінюються. У будь-який момент можна перервати процес моделювання (кнопка Halt (Зупинити)) або продовжити виконання перерваного процесу
130
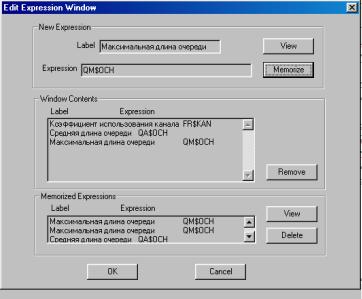
(кнопка Continue (Продовжити)). Для покрокового моделювання використовується кнопка Step. Слід зважати на те, що значення коефіцієнта використання, яке видається у вікні EXPRESSIONS, подано з масштабом 1000.
Настроювання установок. Для керування моделюванням, настроювання зовнішнього вигляду повідомлень, змісту вікон і визначення функціональних клавіш використовуються відповідні установки. Усі створювані об’єкти успадковують початкові установки існуючої моделі. Якщо потрібна зміна значень для всіх моделей у своєму проекті, то необхідно зробити це у вихідному об’єкті моделі. Текстові об’єкти не містять установок. Тільки ці об’єкти можуть бути відкриті для редагування в зовнішніх текстових редакторах.
Рисунок 8.3 – Приклад заповнення вікна Edit Expression Window
Формування вмісту звіту. Для визначення складу звіту за результатами моделювання слід вибрати пункти меню Edit → Settigns → Reports. Відмітка
Create Standard Reports (Створити стандартний звіт) на вкладці Reports
забезпечує автоматичне створення набору стандартних повідомлень після закінчення процесу моделювання. Відмітка In Windows (У вікнах) забезпечує видавання результатів без збереження їх у файлі.
Відмітка елементів на вкладці Reports забезпечує включення відповідних
результатів у звіт: |
Blocks (Блоки); Queues |
(Черги); Tables (Таблиці); Names |
|
(Імена); |
Facilities |
(Канали обслуговування); Storages (Накопичувачі); СЕС |
|
(Ланцюг |
поточних |
подій); FEC (Ланцюг |
майбутніх подій); Savevalues |
|
|
131 |
|
(Величини, що зберігаються); Logicswitches (Логічні перемикачі); Matrices (Матриці).
Призначення функціональних клавіш. Вкладка Function Keys (Функціональні клавіші) використовується для призначення тих або інших функціональних клавіш командам керування процесом моделювання. У розділі
Default Function Keys (Функціональні клавіші за замовчуванням) наведені установки за замовчуванням для функціональних клавіш:
F1 – HELP (Довідка) викликає довідкову систему GPSS W Application
Help;
F2 – CONTINUE (Продовжити) забезпечує продовження виконання перерваного процесу моделювання системи;
F3 – EXIT (Вийти) забезпечує вихід із процесу моделювання;
F4 – HALT (Зупинити) забезпечує переривання процесу моделювання; F5 – STEP 1 забезпечує виконання одного кроку моделювання;
F6 – STOP (Зупинити) забезпечує визначення умов зупинки процесу моделювання;
F7 – STOP,OFF (Скасувати зупинку) видаляє всі умови зупинки процесу моделювання.
Установка символу множення. За замовчуванням система GPSSW
використовує як символ множення знак #, що іноді ускладнює сприйняття виразів. Можна використовувати замість символу # традиційний знак *. Для цього: вибрати пункти меню: Edit → Settings → Simulation, а потім включити відмітку Switch * and # (Включити * замість #); вибрати пункт Застосувати.
8.4 Пакет імітаційного моделювання Vensim
Пакет Vensim призначений для автоматизації процесів формалізації динамічних об'єктів у вигляді потокових діаграм, створення моделей, проведення машинних експериментів і відображення результатів моделювання. Пакет має простий і зручний інтерфейс (рис. 8.4). Модель у пакеті Vensim являє собою візуальне відображення діаграми у нотації динамічного моделювання і сукупність описів кожного елемента діаграми. Вихідними даними моделі є графіки перехідних процесів, що відбуваються в системі.
132
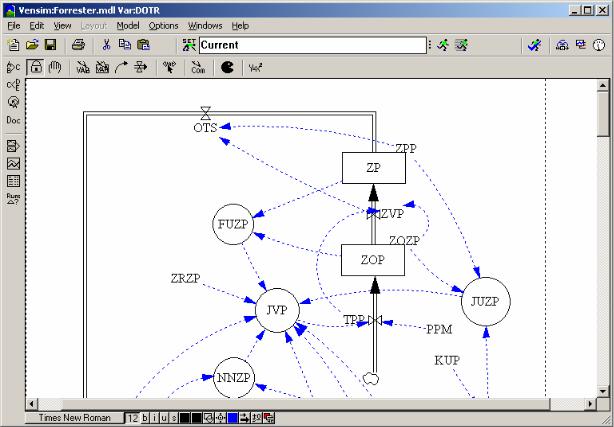
Рисунок 8.4 – Робоче вікно пакету Vensim
Контрольні запитання та завдання
1.Які вимоги висуваються до мов програмування, що використовуються для моделювання систем?
2.На які класи розділяють мови, що використовуються для моделювання
систем?
3.Які переваги мають мови імітаційного моделювання?
4.Наведіть приклади мов імітаційного моделювання.
5.Яке призначення має мова імітаційного моделювання GPSS?
6.Запишіть оператори мови GPSS для генерації та знищення транзактів.
7.Запишіть оператори мови GPSS для моделювання обробки заявок.
8.Запишіть оператори мови GPSS для моделювання черг та накопичувачів.
9.Запишіть оператори мови GPSS для зміни напрямку руху транзактів.
10.Які складові процесу моделювання автоматизують пакети програм?
11.Назвіть приклади пакетів для аналітичного моделювання об’єктів.
133
12. Назвіть приклади і призначення пакетів для імітаційного моделювання об’єктів.
13.Дайте загальну характеристику пакета імітаційного моделювання
GPSS W.
14.Опишіть послідовність дій для створення і виконання програми з використанням пакету імітаційного моделювання GPSS W.
15.Дайте загальну характеристику пакета імітаційного моделювання
Vensim.
9 ПЛАНУВАННЯ МАШИННИХ ЕКСПЕРИМЕНТІВ ІЗ МОДЕЛЯМИ СИСТЕМ
Для отримання достовірних результатів щодо об’єкта дослідження за допомогою комп’ютерної моделі необхідно коректно спланувати машинний експеримент. Основне завдання планування машинних експериментів – отримання необхідної інформації щодо досліджуваної системи S при обмеженнях на ресурси (витрати машинного часу, пам’яті і т.ін.). До числа часткових завдань, що вирішуються при плануванні машинних експериментів, належать завдання зменшення витрат машинного часу на моделювання, збільшення точності та достовірності результатів моделювання, перевірки адекватності моделі і т. д.
Теорія планування експериментів створювалась та тривалий час успішно використовувалась у фізиці, біології, інших областях людської діяльності без використання комп’ютерної техніки. Використання існуючих математичних моделей і методів для планування машинних експериментів з математичними моделями M M потребує врахування специфіки моделювання систем на ЕОМ, зокрема:
– простоти повторення умов експерименту на ЕОМ з моделлю M M системи S;
– можливості управління ходом експерименту з моделлю M M (включаючи можливість його переривання і відновлення);
– відносної простоти варіювання умов проведення експерименту (імітації впливів зовнішнього середовища Е).
План експерименту визначає обсяг і порядок проведення обчислень на ЕОМ, прийоми накопичення та статистичної обробки результатів моделювання
134

системи S. Основне завдання планування машинних експериментів з моделлю M M формулюється так: необхідно отримати достовірну інформацію про об’єкт моделювання при мінімальних або обмежених витратах машинних ресурсів на реалізацію процесу моделювання.
Розрізнюють стратегічне та тактичне планування машинних експериментів. Стратегічне планування має за мету вирішення загального завдання – отримання необхідної інформації щодо системи S за допомогою моделі M M , реалізованої на ЕОМ, з урахуванням обмежень на ресурси, що наявні в розпорядженні експериментатора. Тактичне планування визначає спосіб проведення кожної серії випробувань машинної моделі M M , передбачених планом експерименту.
Застосовуючи системний підхід до проблеми стратегічного планування машинних експериментів, виділяють етапи побудови структурної та функціональної моделі. Структурна модель вибирається, виходячи з того, що має бути зроблено, а тактична – що може бути зроблено.
Структурна модель плану експерименту характеризується кількостями факторів і рівнів для кожного фактора. Кількість елементів експерименту визначається як: NS = q1q2 × ...× qk (де k – кількість факторів експерименту; qi
– кількість рівнів і-го фактора, i = 1,k .
Функціональна модель плану експерименту визначає кількість елементів структурної моделі NF , тобто необхідну кількість різних інформаційних точок. При цьому функціональна модель може бути повною (якщо в оцінці реакції беруть участь всі елементи, NF = NS ) або неповною (якщо кількість реакцій менше за кількість експериментів, NF < NS ). Основна мета побудови функціональної моделі – пошук компромісу між необхідними діями під час машинного експерименту та обмеженими ресурсами на розв’язання задачі моделювання.
Тактичне планування експерименту з машинною моделлю M M системи S пов’язане з питаннями ефективного використання виділених для експерименту машинних ресурсів та визначенням конкретних способів проведення випробувань моделі, намічених планом експерименту, побудованим при стратегічному плануванні. У ході тактичного планування машинного експерименту вирішуються завдання:
– визначення початкових умов та їх впливу на досягнення сталого результату при моделюванні;
135
–забезпечення точності та достовірності результатів моделювання;
–зменшення дисперсії оцінок характеристик процесу функціонування системи, що моделюється;
–вибору правил автоматичної зупинки імітаційного експерименту.
Завдання визначення початкових умов та їх впливу на досягнення
сталого результату при моделюванні виникає внаслідок штучного характеру процесу функціонування моделі M M , яка використовується епізодично, коли експериментатор запускає машинну модель і проводить спостереження. На початку кожного прогону моделі потрібен певний час для досягнення умов рівноваги, які відповідають номінальним умовам функціонування реальної системи. Для запобігання спотворенню результатів, що отримують на початковому відрізку роботи машинної моделі, відповідна інформація виключається з розгляду або початкові умови вибираються так, щоб скоротити час досягнення сталого режиму.
Вирішення завдання забезпечення точності та достовірності результатів моделювання передбачає визначення оцінок точності та достовірності результатів для заданої кількості реалізацій (обсягу вибірки) або оцінки необхідної кількості реалізацій при заданих показниках точності та достовірності результатів моделювання (див. підрозділ 5.5). Кількість реалізацій N при статистичному моделюванні системи S визначається, виходячи з двох основних міркувань: визначення витрат ресурсів на машинний експеримент з моделлю M M й оцінки точності та достовірності результатів експерименту з моделлю (при заданих обмеженнях не ресурси).
Для зменшення дисперсії оцінок характеристик процесу функціонування систем, що моделюються, використовують спеціальні методи, що дозволяють для заданої кількості реалізацій N збільшити точність (зменшити похибку ε) оцінок або для заданої точності (похибки) оцінок зменшити необхідну кількість реалізацій N. Ці методи використовують апріорну інформацію про структуру і поведінку системи, що моделюються S, і називаються методами зменшення дисперсії.
Найпростішим способом вирішення задачі вибору правил автоматичної зупинки імітаційного експерименту є задання необхідної кількості реалізацій N (або довжини інтервалу моделювання Т). Однак такий детермінований підхід не завжди є ефективним через припущення щодо розподілу вихідних змінних, які на етапі тактичного планування є невідомими. Іншим способом є завдання довірчих інтервалів для вихідних змінних і зупинка прогону машинної моделі
136
за умови досягнення заданого довірчого інтервалу. |
Такий спосіб дозволяє |
||
теоретично наблизити час прогону моделі до оптимального. Введення в модель |
|||
M M правил зупинки і операцій |
обчислення довірчих інтервалів збільшує |
||
машинний час, необхідний |
для |
отримання однієї |
вибіркової точки при |
статистичному моделюванні. |
Правила визначення умов автоматичної зупинки |
||
можуть задаватися двома способами: |
за допомогою двоетапної процедури |
|||
(спочатку виконується пробний прогін моделі з |
N реалізацій, |
що дозволяє |
||
оцінити необхідну кількість реалізацій |
|
′ |
то прогони моделі |
|
N * , і якщо N ≥N * , |
||||
|
|
′ |
|
|
можна закінчити, в іншому випадку |
необхідно |
виконати |
ще |
N = N * -N′ |
реалізацій); шляхом використання послідовного аналізу для визначення мінімально необхідної кількості реалізацій N*, яка розглядається при цьому як випадкова величина, що залежить від результатів N–1 попередніх реалізацій машинного експерименту.
Контрольні запитання та завдання
1.У чому полягає основне завдання планування машинних експери-
ментів?
2.У чому полягає специфіка моделювання систем на ЕОМ?
3.У чому полягає завдання стратегічного планування машинних експериментів?
4.У чому полягає завдання тактичного планування машинних експериментів?
5.Які задачі розв’язуються в процесі стратегічного планування машинних експериментів?
6.Які задачі розв’язуються в процесі тактичного планування машинних експериментів?
7.Що визначають структурна та функціональні моделі плану експерименту?
8.Яким способом враховується вплив початкових умов на результати моделювання?
9.Як вирішується завдання забезпечення точності та достовірності результатів моделювання?
10.За якими правилами здійснюється автоматична зупинка імітаційного експерименту?
137
10 ДИНАМІЧНА МОДЕЛЬ ВИРОБНИЧО-ЗБУТОВОЇ СИСТЕМИ
10.1 Структура виробничо-збутової системи
Розглянемо на прикладі виробничо-збутового комплексу питання яким чином організаційна форма й правила прийняття рішень можуть стати джерелом типових небажаних явищ у поводженні об'єкта в цілому. Найважливіша проблема подібних систем є приведення темпу виробництва й темпів продажу продукції у відповідність до вимог кінцевого споживача. Як показує практика, темпи виробництва часто змінюються в більших межах, ніж фактичні темпи споживчих покупок. Було виявлено, що виробничо-збутові системи (ВЗС) з ланцюгами взаємозалежних товарних запасів і певним порядком видачі замовлень на їх поповнення мають властивості підсилювати невеликі коливання, що виникають у роздрібній ланці.
Глобальною метою моделювання подібних об'єктів є пошук відповідей, зокрема, на такі питання:
–як невеликі зміни обсягу роздрібних продаж можуть викликати значні коливання виробництва продукції підприємства?
–чому прискорення виконання конторських робіт може не зробити істотного впливу на поліпшення управлінських рішень?
–чому керівництво підприємством може виявитися не в змозі виконати замовлення, хоча його виробничі можливості перевищують обсяги продаж?
Об'єктом дослідження є трирівнева територіально розподілена система з виробництва і збуту продукції, що включає завод (виробнича ланка), мережу оптових баз (оптова ланка) і мережу магазинів (роздрібна ланка – РЛ) (рис. 10.1).
При створенні моделі необхідно мати інформацію: щодо організаційної структури системи; щодо запізнень рішень і дій; щодо правил регулювання закупівель і формування товарних запасів.
У системі існують запаси трьох рівнів: на заводі, в оптовій і у роздрібній ланках. Запізнення, що мають місце у системі подано у тижнях (рис. 10.2), являють собою звичайні величини для підприємств, що виготовляють товари довготривалого користування. Передбачено три види замовлень: замовлення на відшкодування проданих товарів; замовлення для поповнення запасів у всіх ланках у зв'язку зі зміною рівня продаж; замовлення, необхідні для заповнення каналів забезпечення товарами по замовленнях, що знаходяться на стадії виконання.
138

РП
РП
РП ОБ
ОБ
РП ОБ
ОБ
РП
РП
З
РП
РП ОБ
РП ОБ РП
РП

 РП
РП
РП
Рисунок 10.1 – Топологічна структура виробничо-збутової системи: З – завод; ОБ – оптова база; РП – роздрібне підприємство
Рисунок 10.2 – Організаційна структура ВЗС
139