

Содержание
1. Структурный анализ механизмов….……………………………………………6
1.1. Определение степени подвижности плоских механизмов…………………..6
1.2. Определение класса механизма………………………………………………..6
2. Кинематическое исследование плоских механизмов…………………………..8
2.1. Основные задачи и методы кинематического исследования механизмов…..8
2.2. Построение планов положений механизмов………………………………....10
2.3. Построение траекторий точек………………………………………………...12
2.4. Кинематическое исследование механизмов методом графиков
(кинематических диаграмм) ………………………………………………………12
2.5. Определение скоростей точек механизма методом планов скоростей…….14
2.6. Определение ускорений точек механизма методом планов ускорений…...19
3. Силовое исследование механизмов…………………………………………….23
3.1. Определение сил инерции и моментов пар сил инерции…………………...24
3.2. Определение реакций в кинематических парах структурных групп………26
4. Расчёт кривошипно – шатунного механизма (КШМ) на ЭВМ……………….35
4.1 Порядок работы с программой………………………………………………...37
5. пример расчёта в ручном режиме……………………………………………...38
5.1 Уравнение движения точки А…………………………………………………39
5.2. Уравнения движения точки В………………………………………………...39
5.3. Уравнения движения звеньев…………………………………………………39
5.4. Скорости и ускорения точек и звеньев………………………………………40
Библиографический список……………………………………………………….41
1. Структурный анализ механизмов
1.1. Определение степени подвижности плоских механизмов
Степень подвижности плоских механизмов определяется по формуле П. Л. Чебышева;
W = 3n – 2P5 – P4, (1.1)
где W – степень подвижности механизма;
n – число подвижных звеньев механизма;
P5 – число кинематических пар пятого класса;
P4 – число кинематических пар четвертого класса.
Степень подвижности механизма определяет число ведущих его звеньев, т. е. количество звеньев, которым необходимо задать движение, чтобы все остальные звенья двигались по вполне определенным законам.
1.2. Определение класса механизма
Класс механизма в целом определяется классом самой сложной его структурной группы.
Механизм раскладывается на структурные группы, начиная с самого удаленного от ведущего звена. При этом всякий раз проверяется степень подвижности оставшегося механизма.
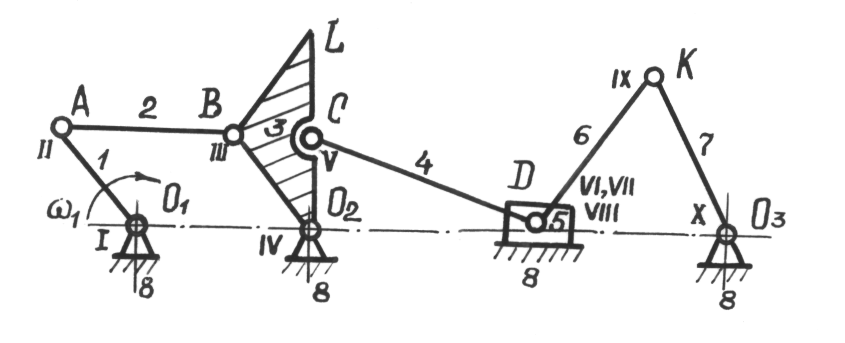
Рис. 1.1
Р е ш е н и е:
Механизм имеет семь подвижных звеньев, соединенных между собой десятью кинематическими парами (на рис. 1.1 они обозначены римскими цифрами).
Определим степень подвижности механизма по формуле:
W = 3n – 2P5 – P4, (1.2)
где n = 7; P5 = 10; P4 =0,
тогда
W = 37 – 210 – 0 = 1.
Это значит, что в данном механизме должно быть одно ведущее звено. В качестве ведущего звена принимаем звено 1 – кривошип. Далее раскладываем механизм на структурные группы (рис. 1.2) и прежде всего отсоединяем самую удаленную от ведущего звена группу Ассура, состоящую из звеньев 6 и 7 (рис. 1.2, а) и трех вращательных кинематических пар – VIII, IX, X. Степень подвижности этой группы после присоединения к стойке равна нулю:
W = 32 – 23-0 = 0.
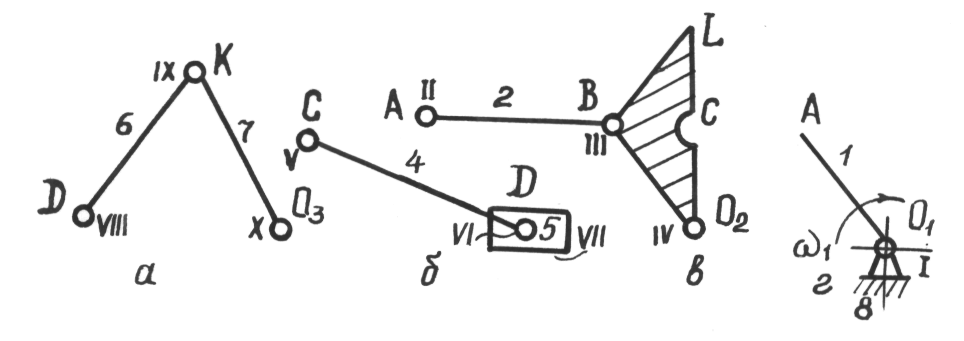
Группа звеньев 6 и 7 (DKO3) является группой II класса.
Затем отсоединяем группу, состоящую из звеньев 4 и 5 (рис. 1.2, б) и трех кинематических пар – вращательных V и VI и вспомогательной VII.
Степень подвижности этой группы после присоединения к стойке, как и в предыдущем случае, равна нулю.
Группа звеньев 4 и 5 (CD) является группой II класса.
Аналогично поступаем с группой Ассура ABO2 в которую входят звенья 2 и 3 и кинематические пары II – IV (рис. 1.2, в). Степень подвижности этой группы W = 0. Группа звеньев 2 и 3 (ABO2) является группой II класса.
После отсоединения указанных групп остался исходный механизм (рис. 1.2, г), состоящий из кривошипа I (OA1), присоединенного к стойке вращательной парой I, и имеющий степень подвижности
W = 31 – 21 – 0 = 1.
Весь механизм является механизмом II класса. Структурная форма для данного механизма составляется в порядке образования механизма (ведущее звено и все группы Ассура по порядку):
[1] – [2; 3] – [4; 5] – [6; 7].