

4. Расчет кривошипно-шатунного механизма (кшм)
на эвм
Задачей расчета являются определение кинематических и силовых параметров механизма, построение планов скоростей, ускорений, сил и построение крайних положений звеньев механизма по заданным параметрам.
Схема алгоритма расчета КШМ приведена на рис. 4.1
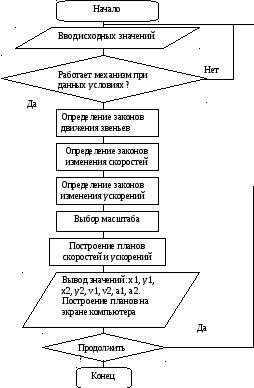
Рис. 4.1
Для удобства написания программы в ней были применены идентификаторы, приведенные в таблице.
Таблица
Идентификаторы и соответствующие им величины
|
Идентифи-катор |
Обозначение величины. |
Единица величины |
Наименование величины |
|
а |
|
градус |
Угол, задающий начальное положение кривошипа |
|
x1, x2, y1, y2 |
x, y |
м |
Координаты соответствующих звеньев |
|
v1,v2 |
v |
м/с |
Скорости точек соответствующего звена |
|
a1,a2 |
a |
м/с2 |
Ускорения соответствующих точек звена |
На основе результатов, полученных с помощью ЭВМ, сделать сравнение аналитического и графического метода решения задач. Сравнить полученные результаты с результатами расчета, сделанного в ручном режиме для исходных данных, соответствующего варианта.
Порядок работы с программой
Перед началом
расчета необходимо ввести исходные
данные. Для этого на панели инструментов
нажать мышкой кнопку
![]() после чего появится запрос программы
на ввод данных (рис. 4.2) и предложено
заполнить соответствующие поля:
после чего появится запрос программы
на ввод данных (рис. 4.2) и предложено
заполнить соответствующие поля:
поле, в которое записывается начальный угол;
длина звена О1А;
длина звена АВ;
различие координат YO1 и Y плоскости скольжения ползуна.
После
заполнения соответствующих значений
переходим к моделированию, для чего
нажимаем кнопку
![]() .
Программа покажет поведение механизма
в реальном времени с построением
векторов скорости и ускорения для
соответствующих точек.
.
Программа покажет поведение механизма
в реальном времени с построением
векторов скорости и ускорения для
соответствующих точек.
Для получения данных в цифровом виде необходимо нажать во время моделирования клавишу «Tab».
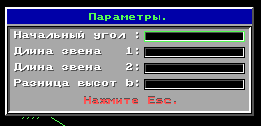
Рис. 4.2
5. Пример расчета в ручноМ режиме
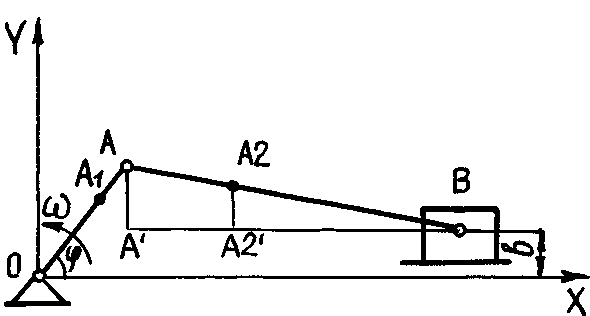
L1 = 10, L2 = 40, Y = 30, a1 = 5, a2 = 25, Yb = 2.
Рис. 5.1
Определить скорости и ускорения точек A, B, A1, A2.
Примечание: движение ведущего звена равномерное (= const).
5.1. Уравнения движения точки А
Кривошип ОА (OA = L1) был построен в зависимости от угла поворота и длины ОА (известны).
![]()
Xa = 10cos(30) = 8,66;
Ya = 10sin(30) = 5.
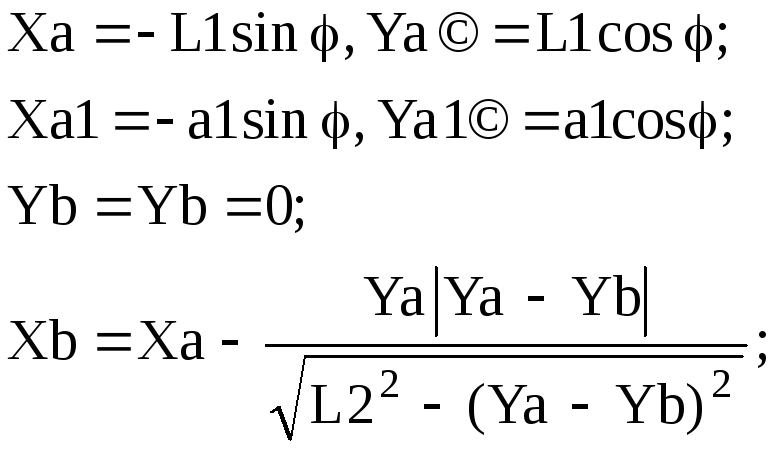
5.2. Уравнения движения точки В
Координата Y точки В нам тоже известна. Рассмотрим треугольник ААВ. По теореме Пифагора имеем:
![]()
или
![]() ;
;
Xb
= 8,66 +
![]() =
20.95.
=
20.95.
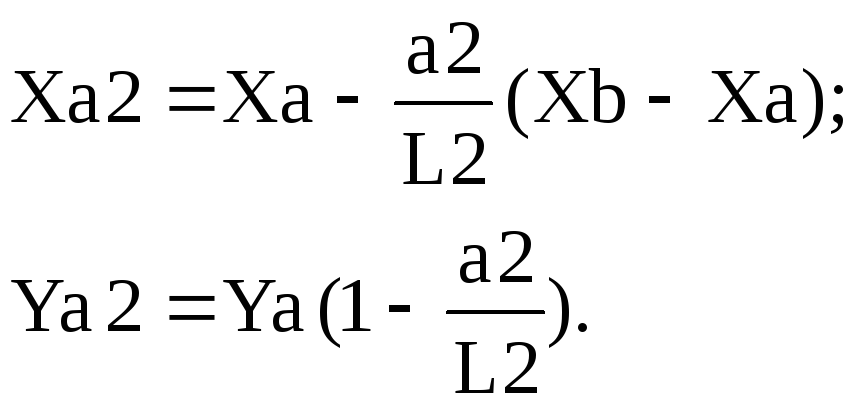
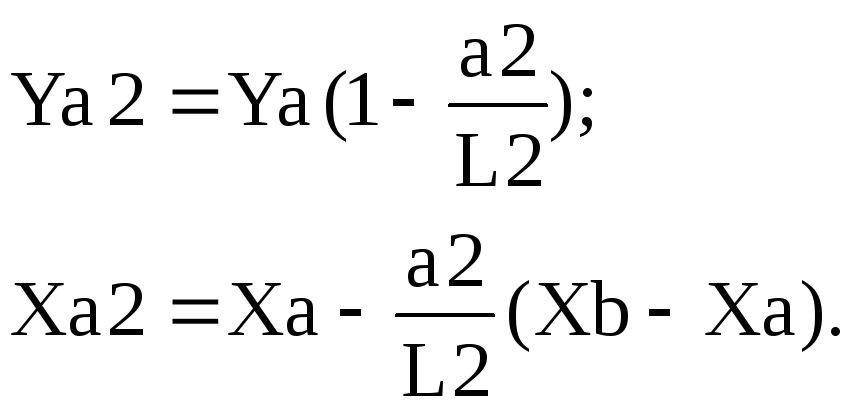
5.3. Уравнения движения звеньев
Обозначим точки А1 и А2, принадлежащие соответственно звеньям 1 и 2. Пусть ОА1 = а1, АА2 = а2, тогда
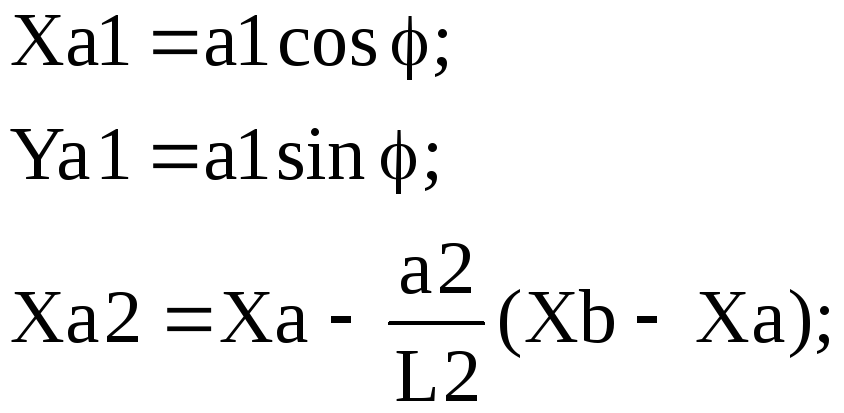
![]()
П о я с н е н и я.
1) Координаты Xa2 и Ya2 находим из подобия треугольников AAB и A2A2B:
2) Численные значения координат промежуточных точек не определяются, так как для нахождения скоростей и ускорений их значения не нужны.
5.4. Скорости и ускорения точек и звеньев
Для отыскания скоростей и ускорений точек и звеньев продифференцируем уравнения движения. Получим проекции скоростей и ускорений на оси X и Y.
З а м е ч а н и е: дифференцировать будем по углу поворота кривошипа. Производную по времени будет потом легко найти, зная закон изменения угла поворота. Такое упрощение делает универсальными уравнения движения.
Первые производные:
Скорости (m):
Vxa = 10sin(30) = 5, Vya = 10cos(30) = 8.66;
Vxa1= 5*sin(30)= 2.5, Vya1 = 5cos(30) = 4.33;
Vxb =
5
![]() =
7.11;
=
7.11;
Vxa2 = 5 25/40 (7.11 ( 5))= 3.68;
Vya2 = 8.66 (1 25/40) = 3.25.
Вторые производные:
![]()
![]() ;
;
![]()
![]() ;
;
![]()
Ускорения (m):
аxa = 10cos(30) = 8,66; aya = 10sin(30) = 5;
axa1 = 5cos(30) = 4,33; aya1 = 5sin(30) = 2,5;
axb = 8,66 + 2((5 2)8,66)^2)/((160 9)^(3/2)) (8,66^2+( 5)3)/(12,288)= = 8,66 + 0,727 4,882 = 12,815;
axa2 = 8.66-25/40( 12.815 (8.66)) = 6.063;
aya2 = 5(1 25/40) = 1,875.
По данным, выданным машиной, приводим планы абсолютных скоростей (рис. 5.2, а) и ускорений (рис. 5.2, б).


а б
Рис. 5.2
Библиографический список
А р т о б о л е в с к и й И. И. Теория механизмов и машин. М.: Наука, 1988. 640 с.
Теория механизмов и механика машин: Учеб. Для втузов / К. В. Ф р о л о в, С. А. П о п о в, А. К. М у с а т о в и др.; Под ред. К. В. Ф р о л о в а. 3-е изд., М.: Высшая школа, 2001. 496 с.
К о р е н я к о А. С. и др. Курсовое проектирование по теории механизмов и машин / Киев: Вища школа, 1970. 320 с.
КОВАЛЕВА Нина Васильевна
БОРОДИН Анатолий Васильевич
ВЕЛЬГОДСКАЯ Татьяна Владимировна
Анализ и синтез плоских рычажных механизмов
____________________________
Редактор Т.С. Паршикова
Лицензия ИД № 01094. Подписано в печать
Формат
![]() .
Бумага офсетная.
.
Бумага офсетная.
Плоская печать. усл. печ. л. . Уч.-изд. л.
Тираж экз. Заказ
Редакционно-издателдьский отдел ОмГУПСа
Типография ОмГУПСа