

14 Позиционные аср: характер переходных процессов, показатели качества, область применения
Простейшая система двухпозиционного регулирования может быть представлена в виде последовательного соединения позиционного регулятора (ПР) и объекта регулирования (ОР), охваченных отрицательной обратной связью (рисунок 10.1). Основным возмущающим воздействием здесь является нагрузка объекта Z, изменение которой компенсируется регулирующим воздействием X. Выходная величина двухпозиционного регулятора Х может принимать только два значения, соответствующие максимальному (Хmах) и минимальному (Хmin) регулирующему воздействию на объект
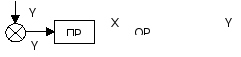
Рисунок 10.1 - Структурная схема автоматической системы двухпозиционного регулирования

|
Рисунок 10.2а – Статическая характеристика идеального двухпозиционного регулятора |
Рисунок 10.2б – Статическая характеристика реального двухпозиционного регулятора
|
На рисунке 10.2а изображена статическая характеристика идеального двухпозиционного регулятора, мгновенно меняющего свой выходной сигнал Х при достижении регулируемой величиной Y заданного значения YЗ. Реальный регулятор обладает некоторой зоной нечувствительности σу (рисунок 10.2б), в пределах которой изменение регулируемой величины Y не приводит к изменению регулирующего воздействия Х Другими словами, регулятору необходимо некоторое время для срабатывания, поэтому он начинает вступать в работу с запаздыванием.
При Y<Yз идеальный позиционный регулятор вырабатывает регулирующее воздействия Х=Хmax, вызывающее изменение выходной величины Y (см. рисунок 10.3).
Рисунок 10.3 - Изменение выходной величины Y и регулирующего воздействия X при симметричных автоколебаниях (регулятор с зоной нечувствительности σy)

При достижении Y величины Yз регулятор должен был бы сработать, однако, ввиду наличия зоны нечувствительности σу, изменение регулирующего воздействия с Xmax до Xmin происходит с некоторым запаздыванием, при Y>Yз (рисунок 10.3). Таким образом, при использовании двухпозиционных регуляторов величина Y совершает колебания относительно заданного значения Yз. Такие колебания относительно среднего значения с амплитудой А и периодом Т называются автоколебаниями. Период автоколебаний Т = Тв + То, где Тв и То- периоды включения (Х = Xmax) и отключения (Х = Xmin) сигнала регулирующего воздействия соответственно. На рисунке 10.3 изображены так называемые симметричные автоколебания (относительно линии Y = Yз) регулируемой величины.
На практике чаще приходится сталкиваться с автоколебаниями, форма которых несимметрична относительно линии Y = Yз (см. рисунок 10.4).
При несимметричных автоколебаниях возникает так называемая квазистатическая ошибка регулирования «а», равная отклонению среднего значения (оси) автоколебаний от заданного значения регулируемой величины Yз. При Тв< То, а >0, т.е. среднее значение автоколебаний лежит выше прямой Y=Yз и наоборот. Качество двухпозиционного регулирования характеризуется параметрами возникающих в системе автоколебаний: амплитудой А, частотой колебаний и смещением «а» среднего значения относительно заданного значения Yз. Эти параметры зависят от времени запаздывания tз и емкости объекта регулирования, его нагрузки Z, величины зоны нечувствительности регулятора σу и пределов изменения регулирующего воздействия ∆Х= Хmах- Хmin .
Чем меньше А и «а», тем выше качество регулирования, при этом частота колебаний не должна быть очень большой.
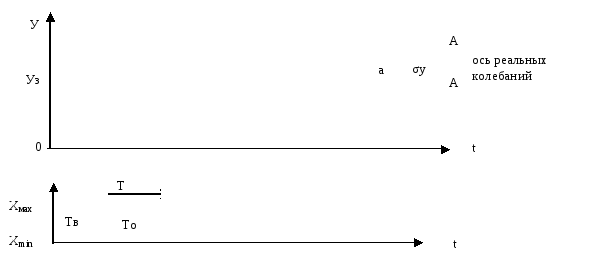
Рисунок 10.4 - Изменение выходной величины при несимметричных автоколебаниях
С увеличением зоны нечувствительности позиционного регулятора σу качество регулирования ухудшается: увеличивается амплитуда А и период колебаний Т в системе. Амплитуда уменьшается с уменьшением ∆Х, т.е. величины регулирующего воздействия. Однако здесь необходимо иметь в виду, что величины Хmах и Хmin зависят от нагрузки объекта Z. Поэтому большие пределы изменения регулирующего воздействия ∆Х могут быть установлены только при незначительных колебаниях нагрузки объекта регулирования.
От нагрузки объекта зависит, в основном, величина и знак параметра «а» - смещения оси автоколебаний относительно Yз. При определенной нагрузке Z=Zо для данного объекта а=0. При Z>Zo величина а<0, а при Z<Zо для данного объекта а>0. Отклонение нагрузки от Zо в обе стороны приводит к возрастанию периода автоколебаний Т.
Позиционные регуляторы просты по конструкции, надежны в работе, несложные в настройке и обслуживании. Поэтому во всех случаях, когда позиционные регуляторы способны обеспечить требуемое качество регулирования, следует применять именно их. Обычно позиционные регуляторы используют на объектах, обладающих малым запаздыванием, большой емкостью.